(一)正点原子STM32MP135移植——准备
一、简述
使用板卡:正点原子的ATK-DLMP135 V1.2
从i.mx6ull学习完过来,想继续学习一下移植uboot和内核的,但是原子官方没有MP135的移植教程,STM32MP157的移植教程用的又是老版本的代码,ST官方更新后的代码不兼容老版本代码移植方法。所以写一篇关于STM32MP135的移植教程
本次移植使用的代码是ST官网发布的代码
使用的交叉编译器是:arm-ostl-linux-gnueabi
要先在ST官网下载SDK和源代码!!!,链接
stm32mp1-openstlinux-6.1-yocto-mickledore-mp1-v23.06.21![]() https://www.st.com/en/embedded-software/stm32mp1dev.html
https://www.st.com/en/embedded-software/stm32mp1dev.html
二、移植顺序
1.TF-A移植
2.optee移植
3.u-boot移植
4.kernel内核移植
三、源码解析
下载好ST官网的源代码之后,可以得到这几个文件夹(特别注意是ST官网的源码,正点原子的移植好了,而且尽量使用官网最新的代码)
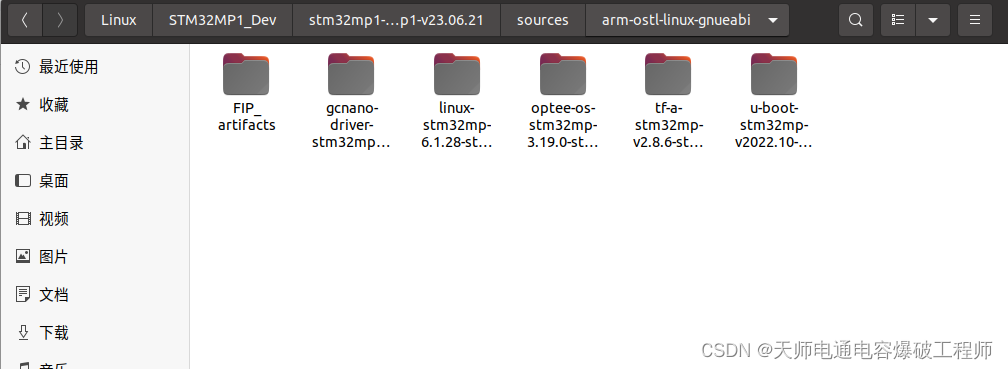
不要改变这些文件夹的位置,文件夹名字无所谓,这几个就这么放着,方便后面的输出目录修改。
FIP_artifacts存放最后输出的东西,fiptool会把TF-A、optee、uboot封装到一块,这就同时需要这几个编译生成的文件
剩下的就是各个要移植部分的代码了