开绕组电机零序Bakc EMF-based无感控制以及正交锁相环inverse Park-based
前言
最近看论文遇到了基于反Park变换的锁相环,用于从开绕组永磁同步电机零序电压信号中提取转子速度与位置信息,实现无感控制。在此记录
基于零序Back EMF的转子估算
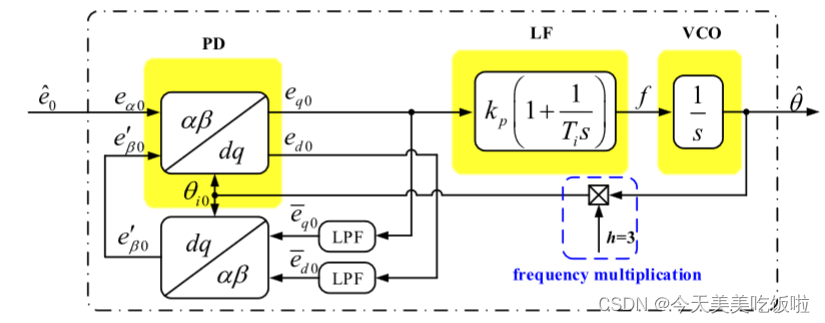
开绕组电机的零序反电动势 e 0 = − 3 ω e ψ 0 s i n 3 θ e e_0=-3\omega_e\psi_0sin3\theta_e e0=−3ωeψ0sin3θe,是一个关于3倍电角度正弦变换的量,因此可以从 e 0 e_0 e0提取得到转子信息。
类比于alpha-beta参考系下的无感思路,把正弦变换的信号 e 0 e_0 e0 变换为两个正交信号,再由正交锁相环QPLL得到电角速度以及电角度。
显然这个转子观测器的输入,是单一的正弦变换量;观测器的输出是输入信号的相位以及频率。
是不是有点像电力电子的单相锁相环呢。
而单相锁相环用得最多的有Notch-Based和SOGI-based两种类型的锁相环。
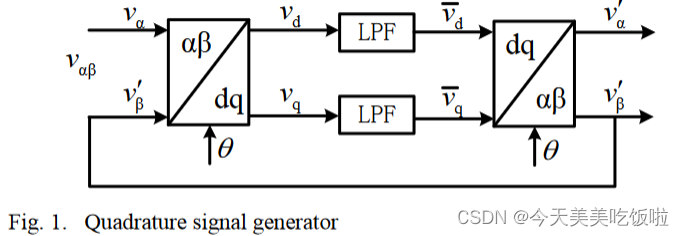
回顾一下SOGI-Based PLL的结构,正弦信号经SOGI生成两个正交信号,Park正变换鉴相、PI滤波、积分得到相位。跟该观测器唯一不一样的只在正交信号产生的部分,这里是用的Park逆变换来实现的正交信号发生。
Inverse Park-Based PLL
简单点,上述的基于反Park的QSG结构如下图所示
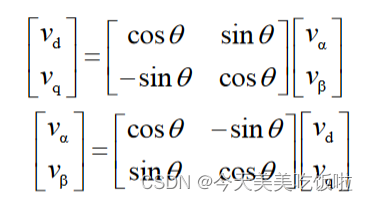
信号之间有如下关系
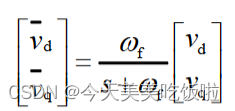
可推导得到
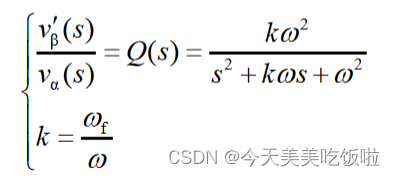
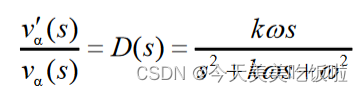
居然与SOGI变换的传递函数是一模一样的。
根据自动控制理论Q(s)是一个低通滤波器,D(s)是一个带通滤波器,两者的伯德图如下。
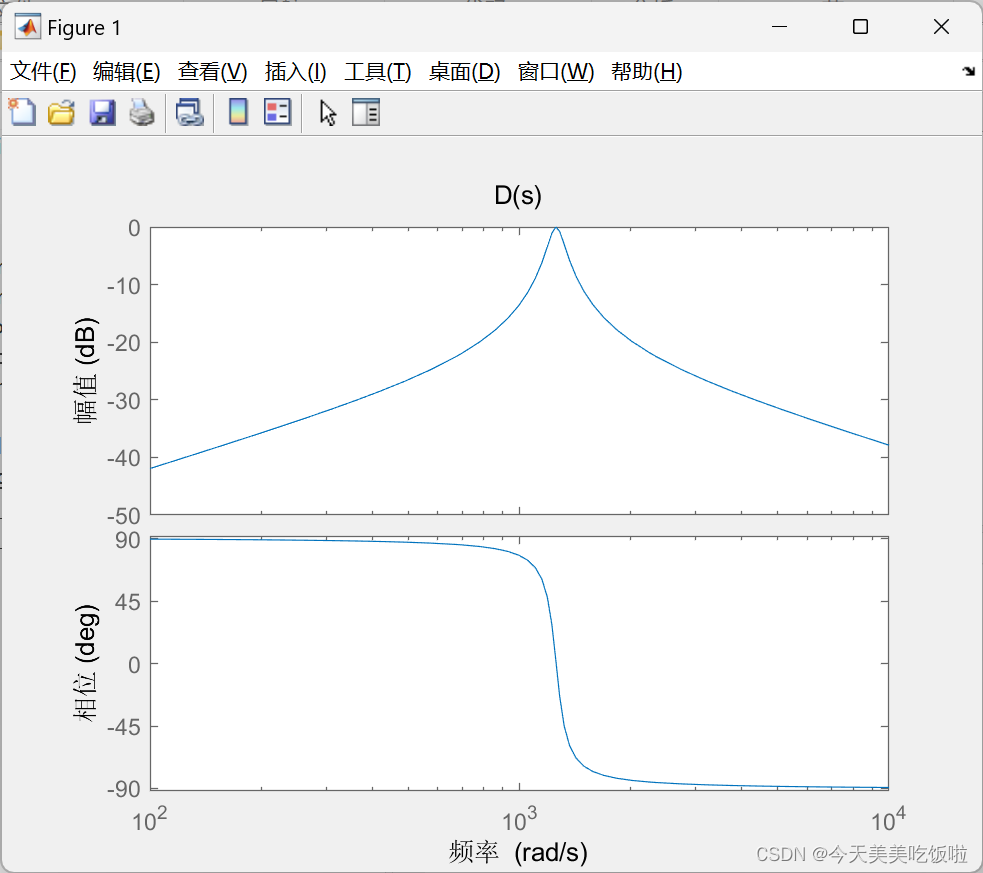
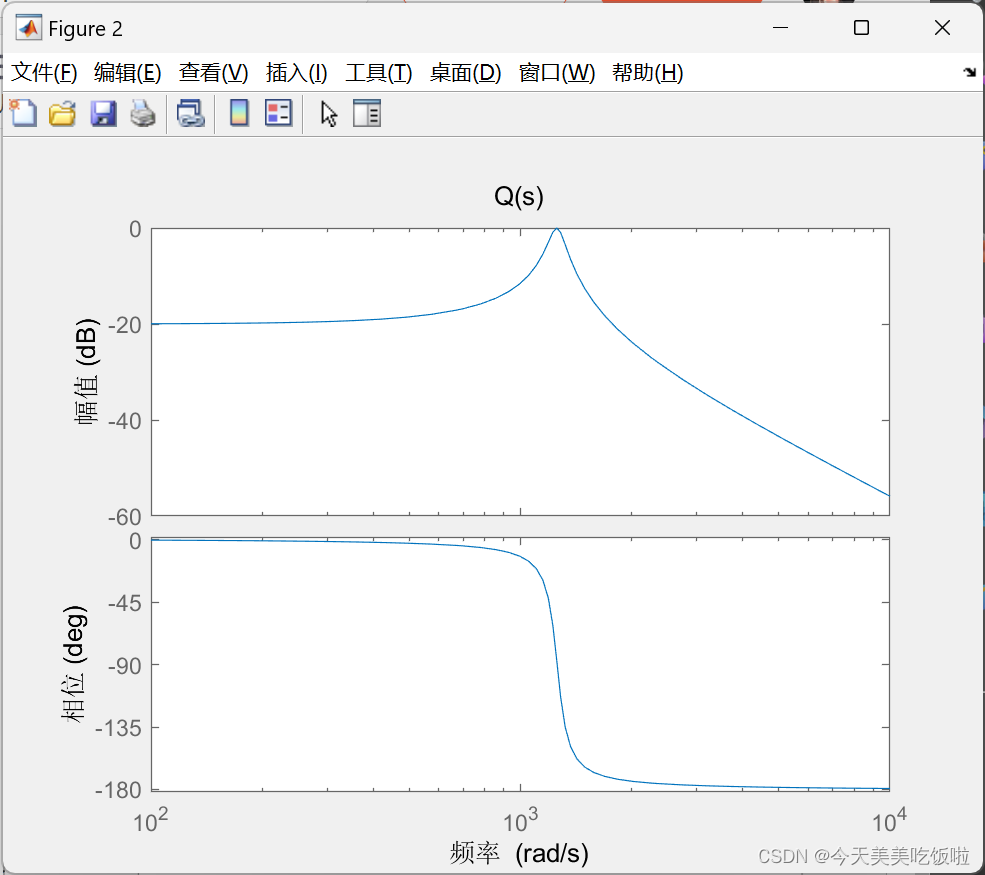
在各自谐振频率处的相位增益分别为0、-90,从而实现了正交变换。