D1s RDC2022纪念版开发板开箱评测及点屏教程
作者@new_bee
本文转自:https://bbs.aw-ol.com/topic/3005/
目录
- 芯片介绍
- 开发板介绍
- RT-Smart用户态系统编译使用
- 感想
- 引用
1. 芯片介绍
RISC-V架构由于其精简和开源的特性,得到业界的认可,近几年可谓相当热门。操作系统方面有RT-Thread,Linux等支持。在今年早些时候,Google希望RISC-V成为Android支持的“一级”架构。
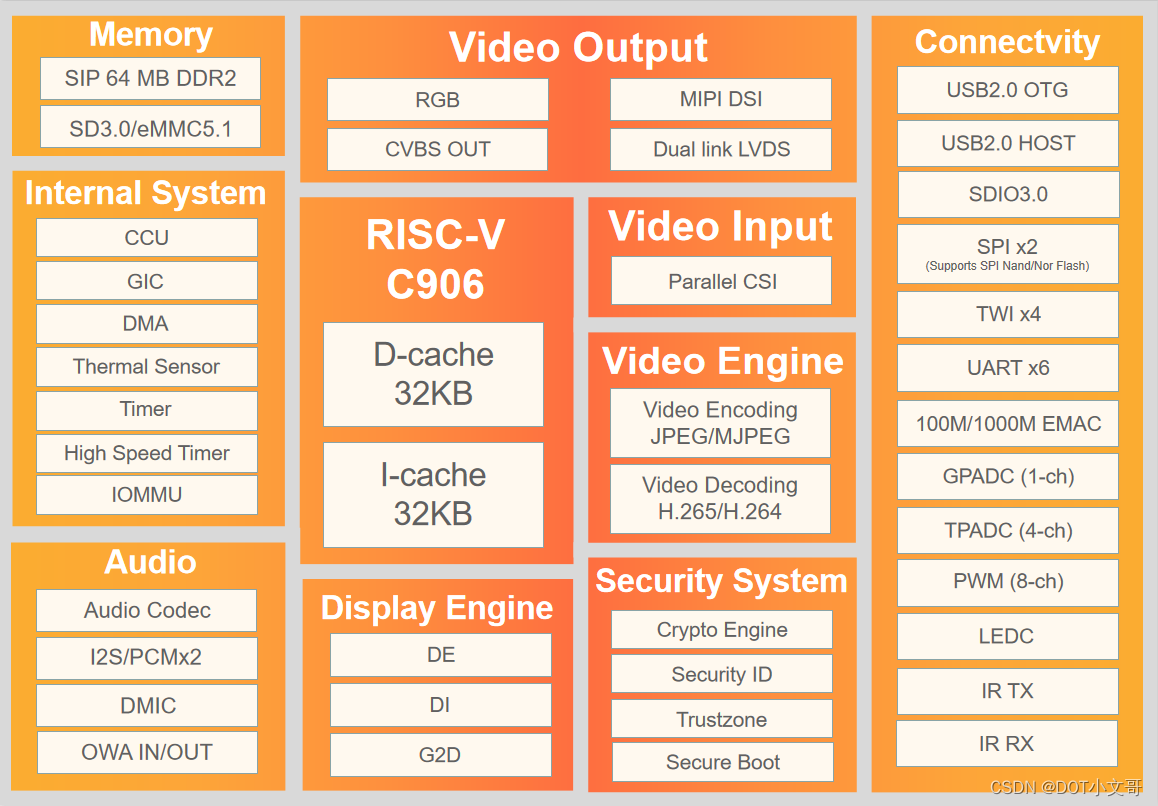
D1s 是22nm 64bit RISC-V 架构的处理器,主频720MHz。内置64M DDR2。支持RGB,MIPI等视频输出接口,ADC、DAC、I2S、PCM、DMIC、OWA 等多种音频接口。音视频编解码支持如下:
Video decodingH.265 up to 1080p@60fps H.264 up to 1080p@60fps MPEG-1/2/4, JPEG, VC1 up to 1080p@60fpsVideo encodingJPEG/MJPEG up to 1080p@60fpsSupports input picture scaler up/down
芯片框图如下:
2. 开发板介绍
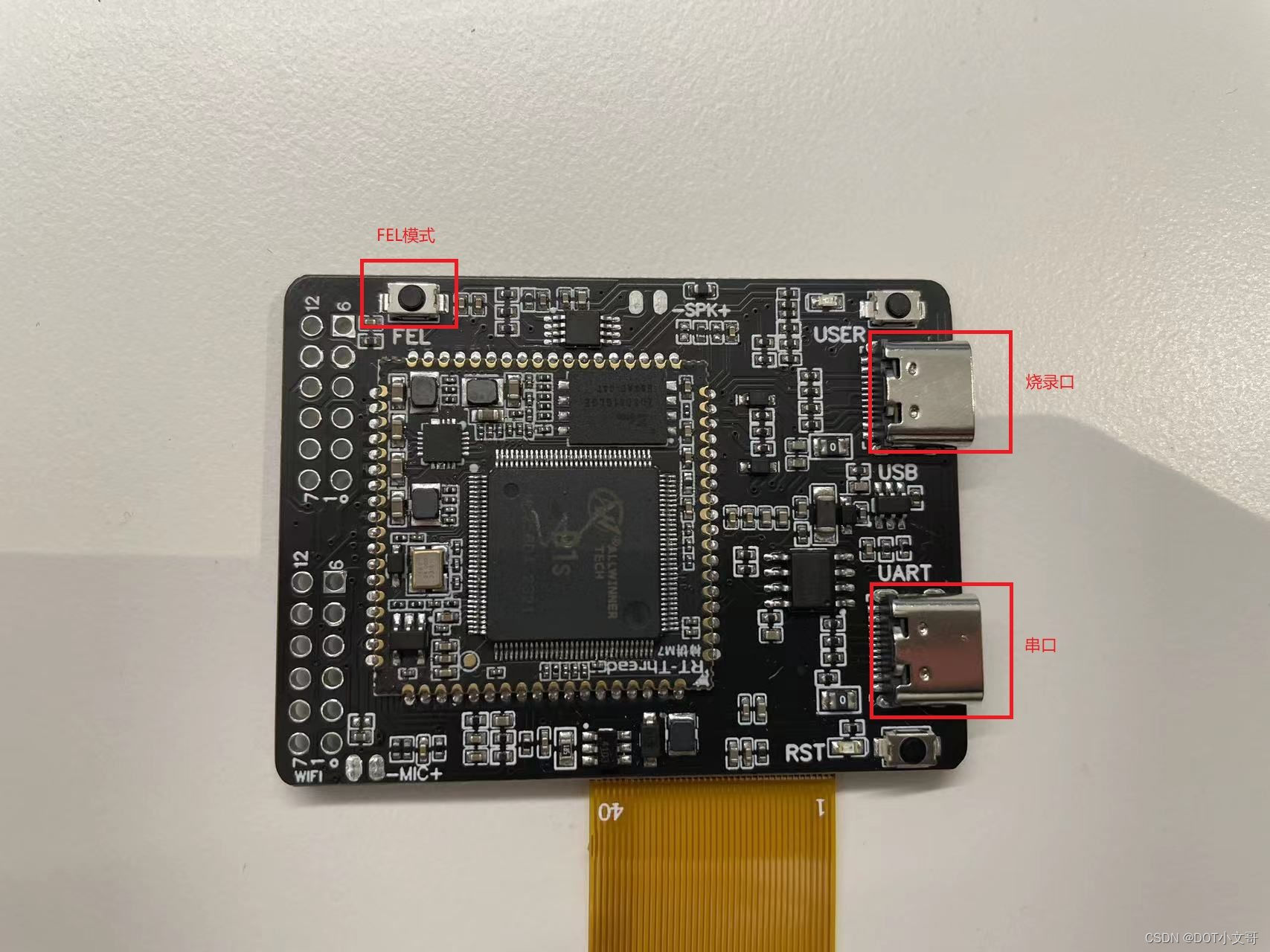
RDC2022 纪念版开发板是基于D1s芯片的小尺寸开发板,尺寸为5.5cm*4cm。正面包含一块D1s核心板,外围电路采用ME3116作为DCDC降压芯片,CH340N作为USB-TTL芯片,PT4103作为背光驱动,并包含一块LM4890音频功放。总体电路比较简洁。
开发板上方USB为烧录口,下方为串口,可以在开发板启动后接串口调试。
开发板背面为SD卡插槽,一个RGB888接口接显示屏,和一个触摸屏接口。该开发板还包含两组12脚的PMOD接口用于接插外设。

RGB接口按引脚定义可以接入通用RGB屏幕,我这里接的是480*272的屏幕,引脚定义如下:
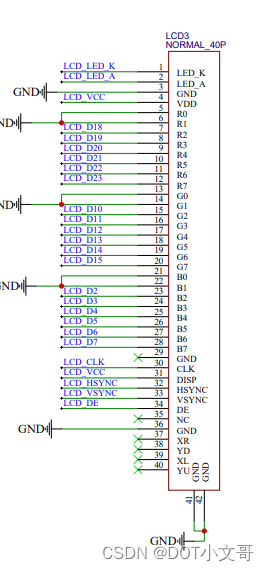
整体开发板原理图:
2022-RDC-D1S.pdf
3. RT-Smart用户态系统编译使用
RT-Smart 是基于 RT-Thread 操作系统上的混合操作系统,把应用从内核中独立出来,形成独立的用户态应用程序。这样更加安全。
以下编译过程参考了快来尝鲜!!使用 D1s (RDC2022 纪念版) 运行 RT-Smart,并将过程中一些小坑记录下,方便后面遇到同样问题的人。
3.1 刷机&调试环境准备
操作系统:Windows
下载 zadig.7z
首先用typec数据线一端插入烧录口,按住FEL按钮同时另一端插入电脑,此时设备进入FEL模式。第一次插入设备管理器会发现未知设备。运行Zadig安装驱动,如下图:
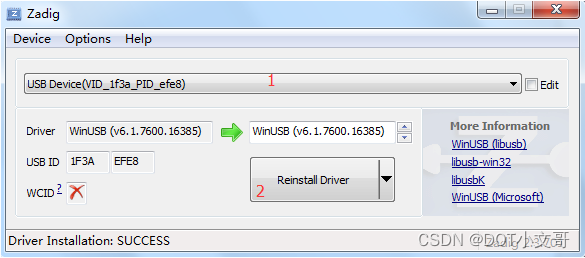
之后就可以在FEL模式下刷机。
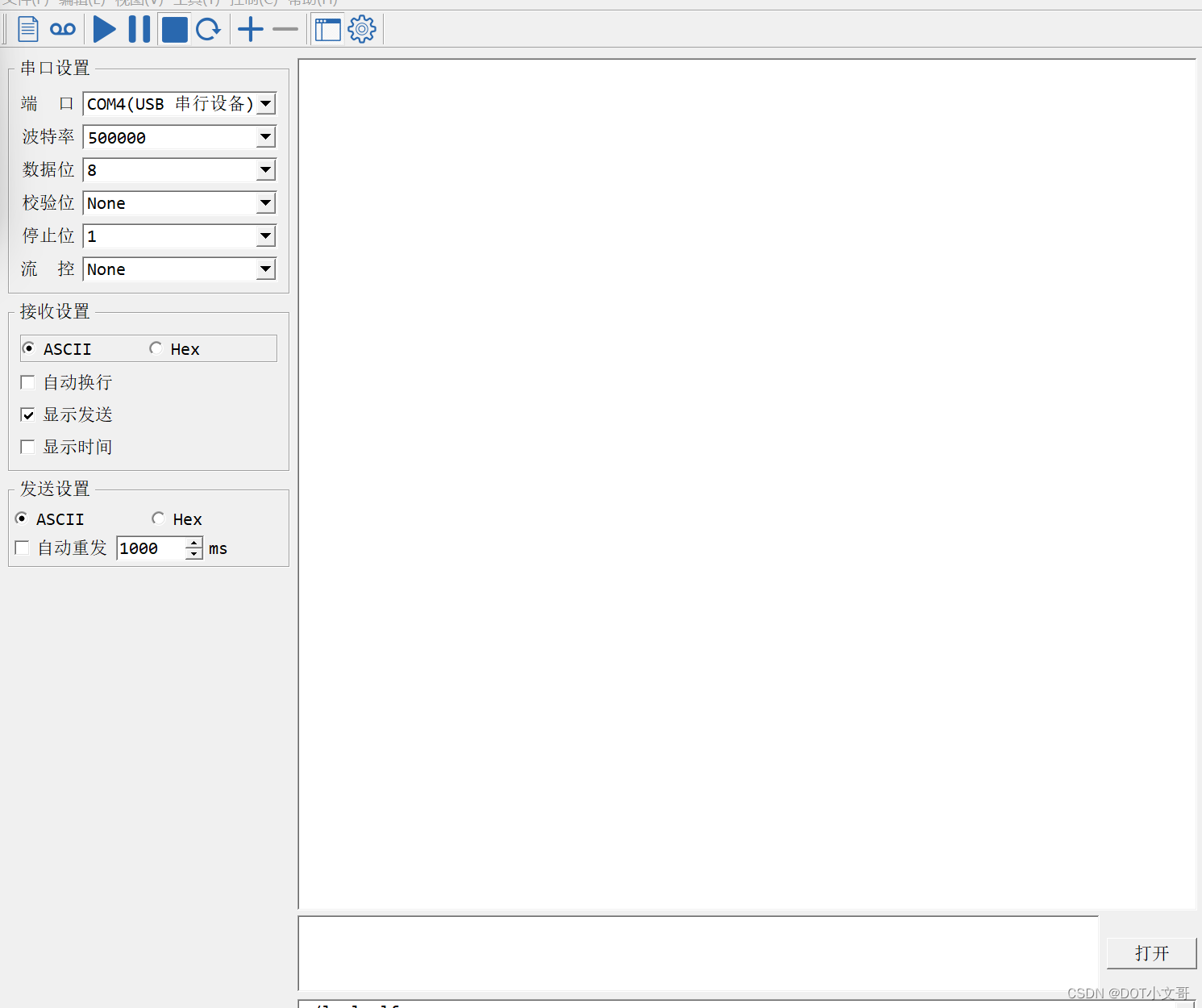
用typec数据线一端插入调试口,另一端插入电脑。电脑打开串口软件,选择对应串口,波特率设为500000,则可以通过串口进行调试。
3.2 开发编译环境准备
操作系统:Ubuntu 20.04
下载用户态代码:
git clone https://github.com/RT-Thread/userapps.git
下载内核态代码:
注:位置可以与用户态代码分开,只要设置RISCV64的工具链环境变量即可
git clone https://github.com/RT-Thread/rt-thread.git
下载RISC-V 64工具链
cd userapps
python3 tools/get_toolchain.py riscv64
配置RISC-V 64工具链环境变量
注意:按官方脚本需要执行
source smart-env.sh riscv64
这个脚本完成两个工作:
- 设置RTT_CC等环境变量
- copy riscv的config到.config
但是某些shell下获取当前脚本目录错误,导致无法完成copy,第一次使用的话会继续用默认的arm工具链编译。
比较简单的解决办法是执行两步:
source smart-env.sh riscv64
cp configs/def_config_riscv64 .config
3.3 编译rt-thread内核
进入bsp目录
cd rt-thread/bsp/allwinner/d1s
修改编译配置
scons --menuconfig
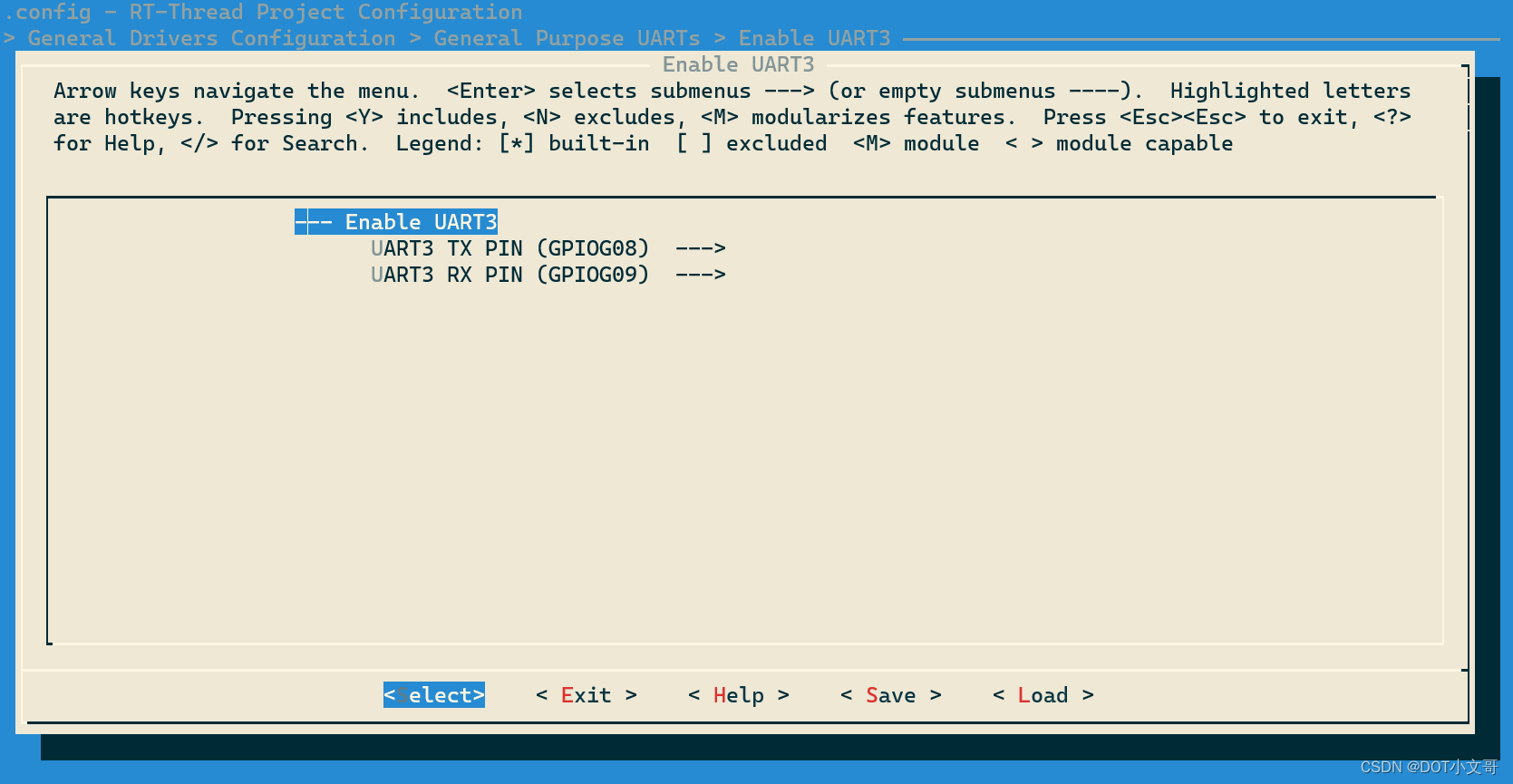
首先打开UART3串口,路径为
General Deivers Configuration->General Purpose UARTs
选中UART3,并修改TX引脚为GPIOG08,RX引脚为GPIOG09
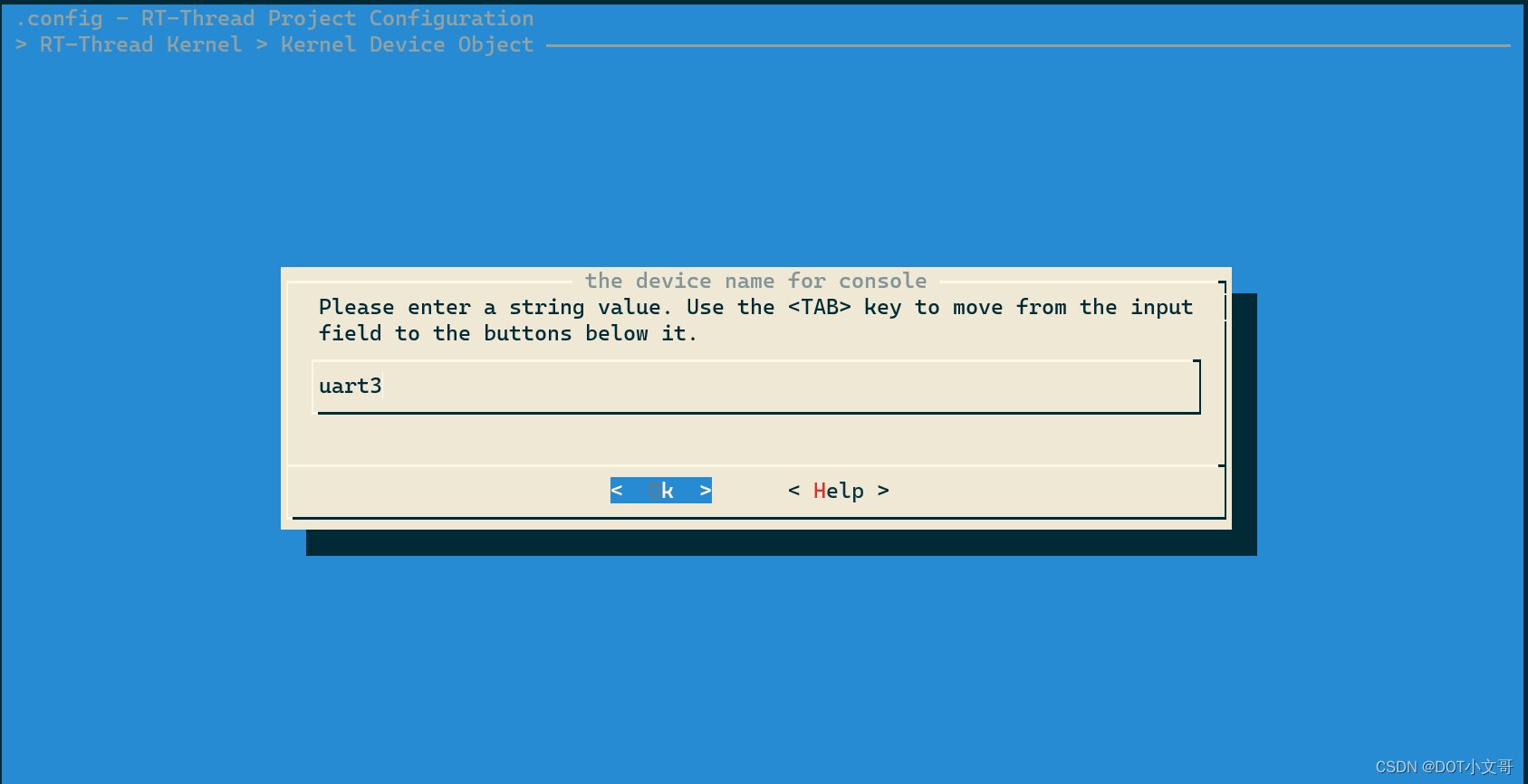
设置终端使用UART3,路径为
RT-Thread Kernel->Kernel Device Object
修改为uart3
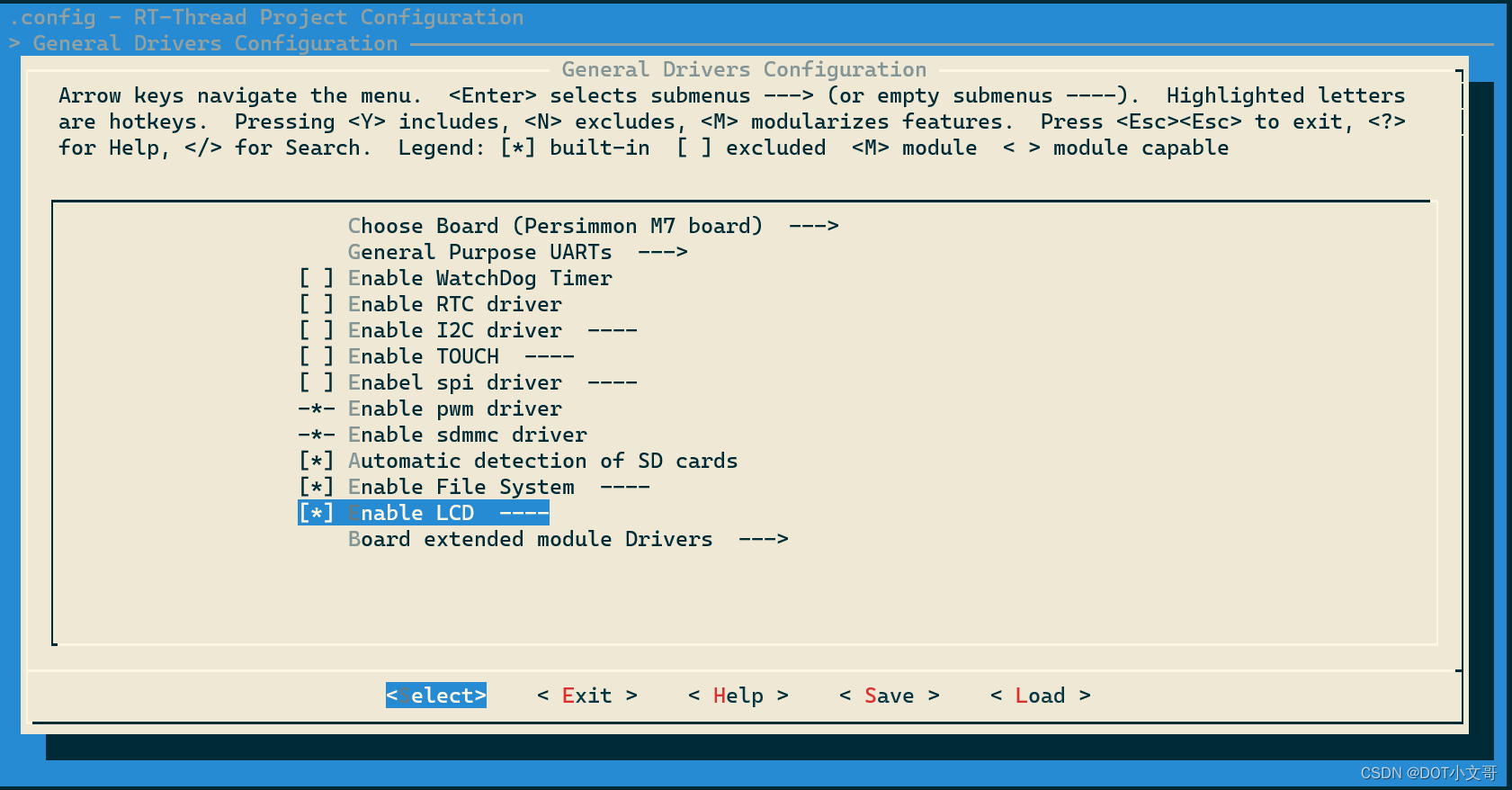
这回目标是点屏,所以要打开LCD驱动,路径为
General Deivers Configuration->Enable LCD
以上完成内核配置,保存退出。
编译内核:
scons
编译成功后会生成内核文件:

烧录内核
下载xfel工具:xfel_v1.2.9.7z
将sd.bin拷贝到windows下xfel工具目录下。按住开发板FEL按钮同时另一端插入电脑。执行命令完成烧录:
xfel.exe sd write 57344 sd.bin
3.4 编译rt-smart用户态应用点屏
首先将D1s bsp目录下 mksdcard.sh 脚本拷贝到userapps目录下。
这里借用丝滑的在RT-Smart用户态运行LVGL的LVGL移植成果
下载修改代码:
https://github.com/Rbb666/RT-Smart-UserAPP.git
拷贝项目下的lvgl到userapps/apps目录下
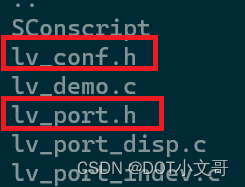
由于一些宏定义缺失,需要将lvgl-nes/lv_rtt_port下的lv_conf.h和lv_port.h拷到对应目录下
同时,由于我没有触摸屏设备,所以注释掉lv_demo.c中的触摸屏初始化代码

在用户态代码根目录下,编译用户态应用
scons
执行脚本制作root文件系统
./mksdcard.sh
生成sdroot.bin

最后烧录文件系统
xfel.exe sd write 8388608 sdroot.bin
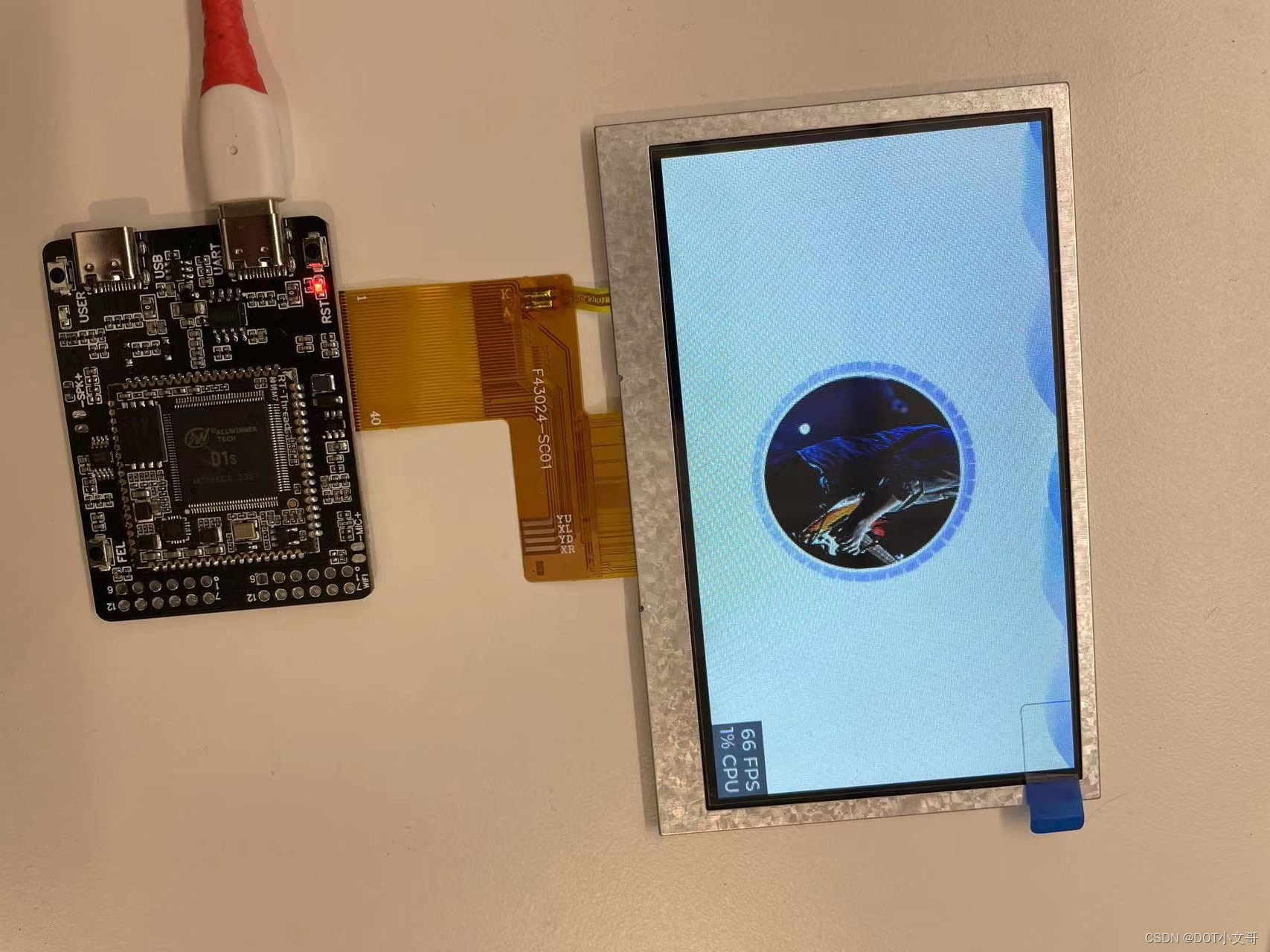
3.5 点屏
烧录完成后重启,就可以用调试口看到目录下有lvgl.elf。执行点亮屏幕
./lvgl.elf
4. 感想
总体而言,RISC-V的生态在厂商和开源社区的努力下逐步完善起来。芯片,开发板,操作系统都有诸多选择,工具链也可以较透明的无缝移植。
但是感触比较深的还是缺少更多的文档和入门教程,对于新人不会像树莓派等有开箱即用的效果(当然树莓派现在的性价比就不说了)。
另外,scons编译确实较方便,不过针对一些复杂的基于makefile的开源项目,移植到scons较为繁复。在用RISCV工具链编译一些基于makefile的开源项目时,也遇到了一些坑,之后会写文章分享。当然RISCV的发展不是一蹴而就的事,仍需业界和开源社区大力支持。
5. 引用
D1s
RT-Thread文档中心
快来尝鲜!!使用 D1s (RDC2022 纪念版) 运行 RT-Smart
丝滑的在RT-Smart用户态运行LVGL