1 论文笔记:Efficient Trajectory Similarity Computation with ContrastiveLearning
2022CIKM
1 intro
1.1 背景
- 轨迹相似度计算是轨迹分析任务(相似子轨迹搜索、轨迹预测和轨迹聚类)最基础的组件之一
- 现有的关于轨迹相似度计算的研究主要可以分为两大类:
- 传统方法
- DTW、EDR、EDwP等
- 二次计算复杂度O(n^2)
- 缺乏稳健性
- 会受到非均匀采样、噪点的影响
- 基于学习的方法
- 旨在减少计算复杂度和/或提高稳健性
- 根据它们的目的将它们分为两个方向
- 神经逼近方法
- 利用强大的神经网络在隐藏空间中逼近任何现有的轨迹测量
- 训练一个神经网络g以将轨迹编码到隐藏空间
- 最小化估计的相似性和基准之间的差异
-
- Dh是隐藏空间中的差异(相似性)测量(例如,欧几里得距离)
-
-
- 不需要两个轨迹之间的点对齐,因此计算复杂度在轨迹的长度上是线性的
- 由于要逼近的测量而遭受 稳健性问题
- auto-encoder 方法
- 无监督地学习映射函
- 为了提高潜在表示相对于低质量的鲁棒性,这些方法采用了不同的策略
- t2vec利用去噪顺序自编码器
- Trembr整合了路网信息并设计了多个任务
-
- 在训练编码模型方面 效率低下。
- 这是由于顺序自编码器架构的固有限制,其中解码过程和逐步重构非常耗时
- t2vec 在 Tesla K40 GPU 上训练 2千万轨迹的一个epoch大约需要 14 小时,平均每个轨迹有 60 个样本
-
- 这些方法试图学习相同基础路线轨迹(高采样轨迹)的一致表示以解决质量问题
- 换句话说,即使来自相同基础路线的轨迹具有不同的采样率和噪点,表示应该是相同的
- 论文认为,由于他们的目标是重构轨迹而不是基础路线,顺序自编码器无法实现这一目标
- ——>对于顺序自编码器来说, 获得一致的表示是非常困难的
-
-
- 神经逼近方法
- 传统方法
1.2 论文思路
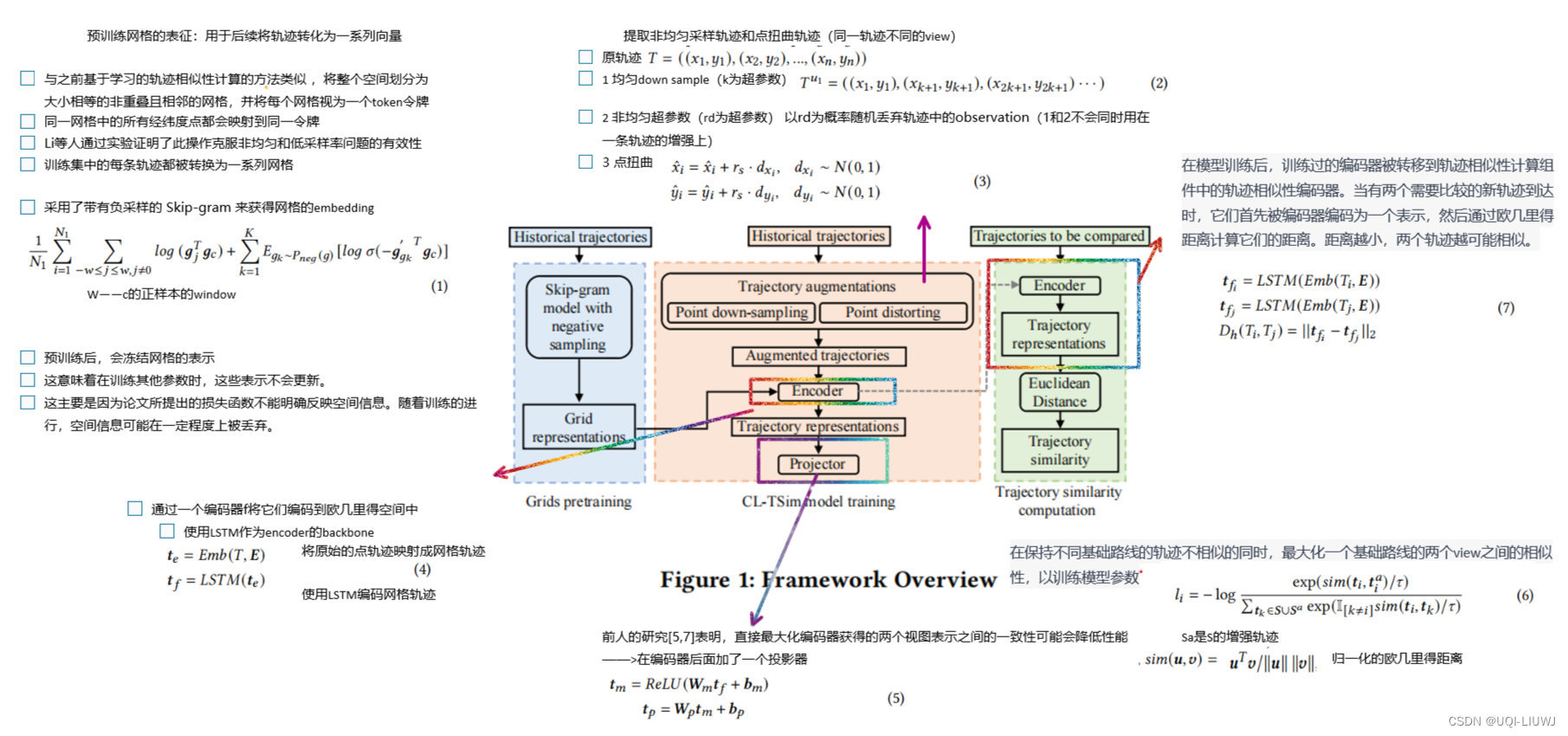
- 提出了一种基于对比学习的轨迹相似性计算的新型鲁棒模型(CL-TSim)
- 遵循常见的范例,首先学习轨迹的表示,然后使用欧几里得距离在编码空间中计算轨迹之间的相似性
- 对轨迹 Ti 进行预处理,以获得增强轨迹 Tj
- 其中使用下采样和扭曲增强来适应轨迹特征,包括非均匀采样率和噪点
- 同时将它们编码到隐藏空间并最大化它们之间的一致性
- 遵循对比学习架构,CL-TSim 只包含一个编码器和一个投影器
- 编码器用于编码原始轨迹以学习它们的表示
- 投影器用于将表示映射到损失函数的度量空间
- 与顺序自编码器相比,它不需要解码器和逐步重构,这可以显著减少训练时间。
2 Preliminary
2.1 基础路线
- 由移动对象生成的连续空间曲线
- 只存在于理论中,因为配备了 GPS 的设备无法连续记录时空位置
2.2 轨迹
- 移动对象的轨迹,记为 T
- 从基础路线中采样的一系列有限点的序列,形式为 𝑇=((𝑥1,𝑦1,𝑡1),(𝑥2,𝑦2,𝑡2),...,(𝑥𝑛,𝑦𝑛,𝑡𝑛))
- xi,yi 代表在时间戳 𝑡𝑖 的采样位置的经度和纬度信息
- 受采样方法和设备的影响,轨迹通常基于不同的采样率生成,并包含有噪点
2.3 问题定义
给定一组轨迹,我们的问题是设计一个高效且鲁棒的模型,以计算轨迹之间的相似性,目标如下:
1)高效的表示学习:有效地为每个轨迹 T 学习一个表示 t,其中 t 可以反映轨迹 T 的基础路线,用于计算轨迹相似性;
2)模型的鲁棒性:换句话说,两个任意轨迹Ti 和Tj 之间的相似性是一致的,不受非均匀采样率和噪点的影响
3 模型
4 实验
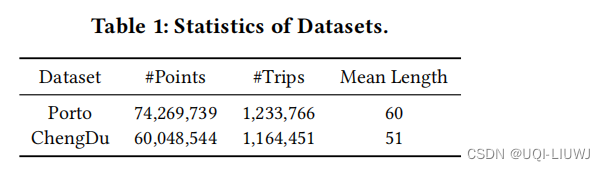
4.1 数据
4.2 评估方法
4.2.1 自相似性
- 给定一组轨迹,随机选择 m 条轨迹和 n 条轨迹,分别记为 Q 和 D
- 对于 Q 中的每条轨迹,通过交替从中取点来创建两个子轨迹(称为双胞胎轨迹),并将第一个子轨迹加入 Q1,而另一个加入 Q2
- 对于 Q1 中的每条轨迹,称为查询轨迹,我们在Q2∪D 中检索最相似的轨迹,称为数据库轨迹
- 显然,Q2 中的轨迹应该排在 D 之前,因为它们是由与 Q1 中相同的轨迹生成的
- 假设 Ti 是 Q1 中的一个查询轨迹,而 Tj 是 Q2 中的相应双胞胎轨迹
- 计算 Ti 与 Q2∪D1 之间轨迹的相似性,根据相似性对轨迹进行排序,并记 Tj 的排名为 ri
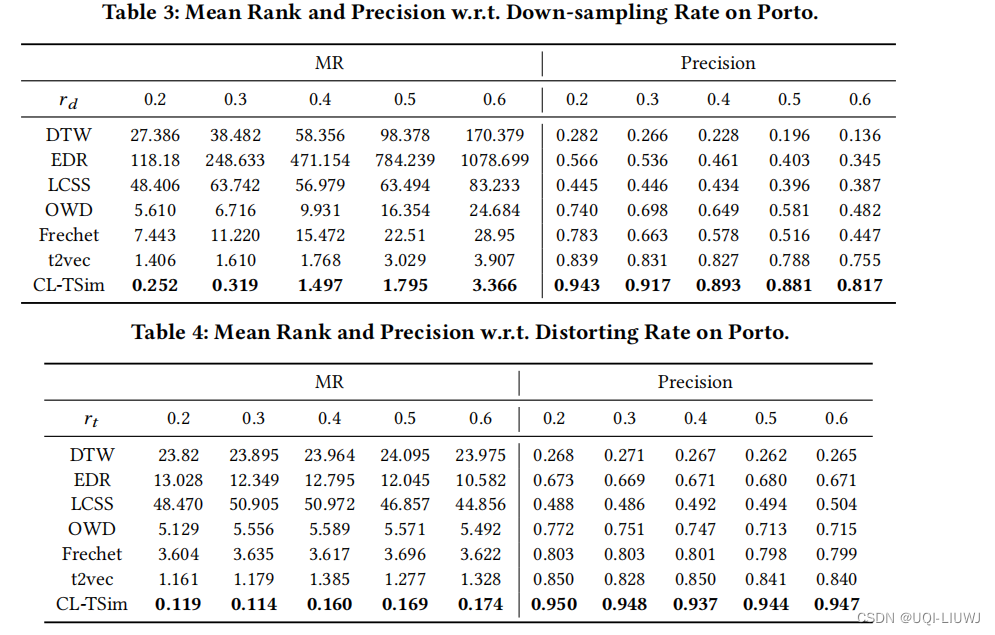
- 基于此,采用两个广泛使用的度量标准,即精确度 P 和平均排名 MR
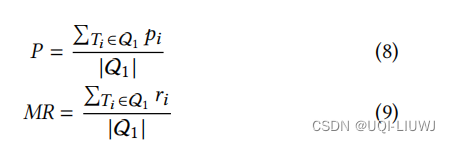
当 ri 等于 0 时,pi 等于 1;否则,pi 等于 0。(只有查询数据集里面Tj是最相似的,才会是1)
更大的 P 或更小的 MR 值意味着更好的自相似性性能。
4.2.2 交叉相似性
一个好的相似性度量应该能够保持两个不同轨迹之间的相似性,而不考虑数据采样策略
交叉距离偏差(CDD)来评估性能

Ta 和 Tb 是具有原始率的两个不同的轨迹,Ta′(rd) 是通过以 d 的速率随机丢弃(或扭曲)样本点获得的Ta 的变体,而 Tb′(rd) 是以与 Ta′(rd) 相同的方式获得的 Tb 的变体。
较小的 CDD 值表明评估的相似性(即,距离)更接近真实值。
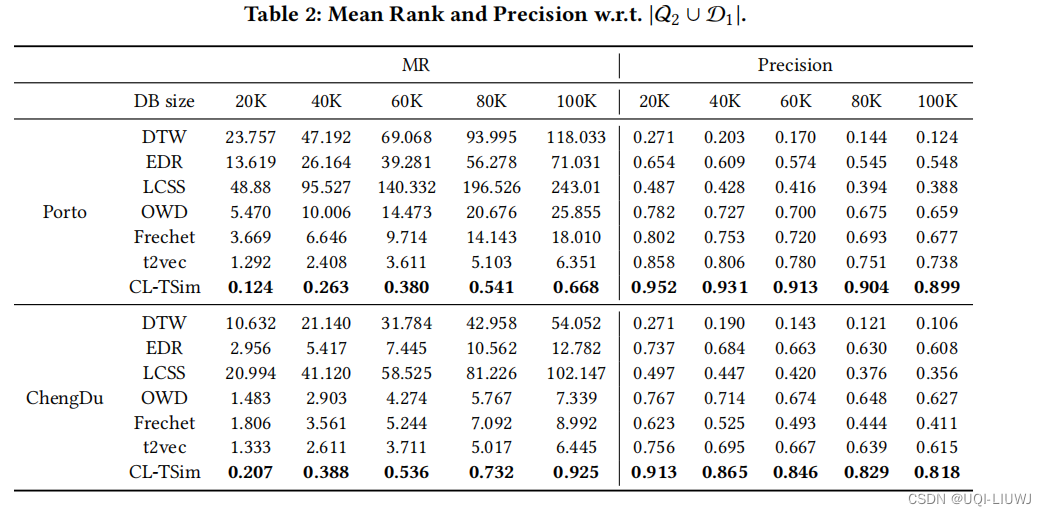
4.3 结果

、