ROS2 从头开始:第6部分 - ROS2 中的 DDS,用于可靠的机器人通信
一、说明
在这篇文章中,我们将重点关注 ROS 2的通信栈DDS,其中这是介于管理节点通信与控制节点通信环节,是上位机决策体系与下位机的控制体系实现指令-执行-反馈的关键实现机制。
二、ROS工程的概念框架
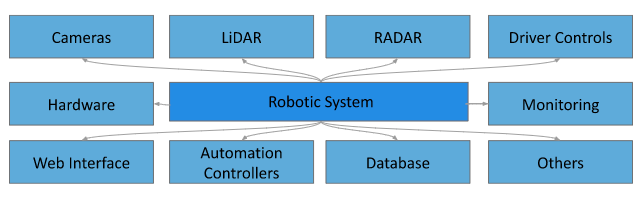
现代机器人系统非常复杂,因为需要集成各种类型的传感器、执行器和其他硬件组件,以便在各种环境中执行任务。这些系统还需要复杂的软件来处理来自传感器的数据、控制执行器并根据该数据做出决策。为了实现高水平的性能和功能,现代机器人系统的复杂性是必要的。