当前位置: 首页 > news >正文 PMSM——转子位置估算基于QPLL news 2025/8/15 16:49:02 文章目录 前言仿真模型观测器速度观测位置观测转矩波形电流波形 前言 今后是电机控制方向的研究生的啦,期待有同行互相交流。 仿真模型 观测器 速度观测 位置观测 转矩波形 电流波形 查看全文 http://www.lryc.cn/news/179105.html 相关文章: Android Studio之Gradle和Gradle插件的区别 DataExcel控件读取和保存excel xlsx 格式文件 【JavaEE】CAS(Compare And Swap)操作 第三章:最新版零基础学习 PYTHON 教程(第三节 - Python 运算符—Python 中的关系运算符) 【GDB】使用 GDB 自动画红黑树 使用Vue3+elementPlus的Tree组件实现一个拖拽文件夹管理 小谈设计模式(7)—装饰模式 nginx 多层代理 + k8s ingress 后端服务获取客户真实ip 配置 6种最常用的3D点云语义分割AI模型对比 UG NX二次开发(C#)-获取UI中选择对象的handle值 win10,WSL的Ubuntu配python3.7手记 02-Zookeeper实战 【C语言深入理解指针(1)】 模拟实现简单的通讯录 rabbitMQ死信队列快速编写记录 数位dp,338. 计数问题 如何解决git clone http/https仓库失败(403错误) 华为云云耀云服务器L实例评测 | 实例评测使用之硬件性能评测:华为云云耀云服务器下的硬件运行评测 Elasticsearch:使用 Elasticsearch 进行语义搜索 JVM的主要组成及其作用 会议AISTATS(Artificial Intelligence and Statistics) Latex模板参考文献引用问题 2023最新外贸建站:WordPress搭建外贸独立站零基础小白保姆级教程 HTTP请求交互基础(基于GPT3.5,持续更新) 小谈设计模式(6)—依赖倒转原则 JetBrains常用插件 【C++哈希应用】位图、布隆过滤器 Qt 编译纯c的C99的项目, error: undefined reference to `f()‘ TensorFlow入门(五、指定GPU运算) Unity - 实践: Metallic流程贴图 转 Specular流程贴图 第三章:最新版零基础学习 PYTHON 教程(第四节 - Python 运算符—Python 逻辑运算符及示例)
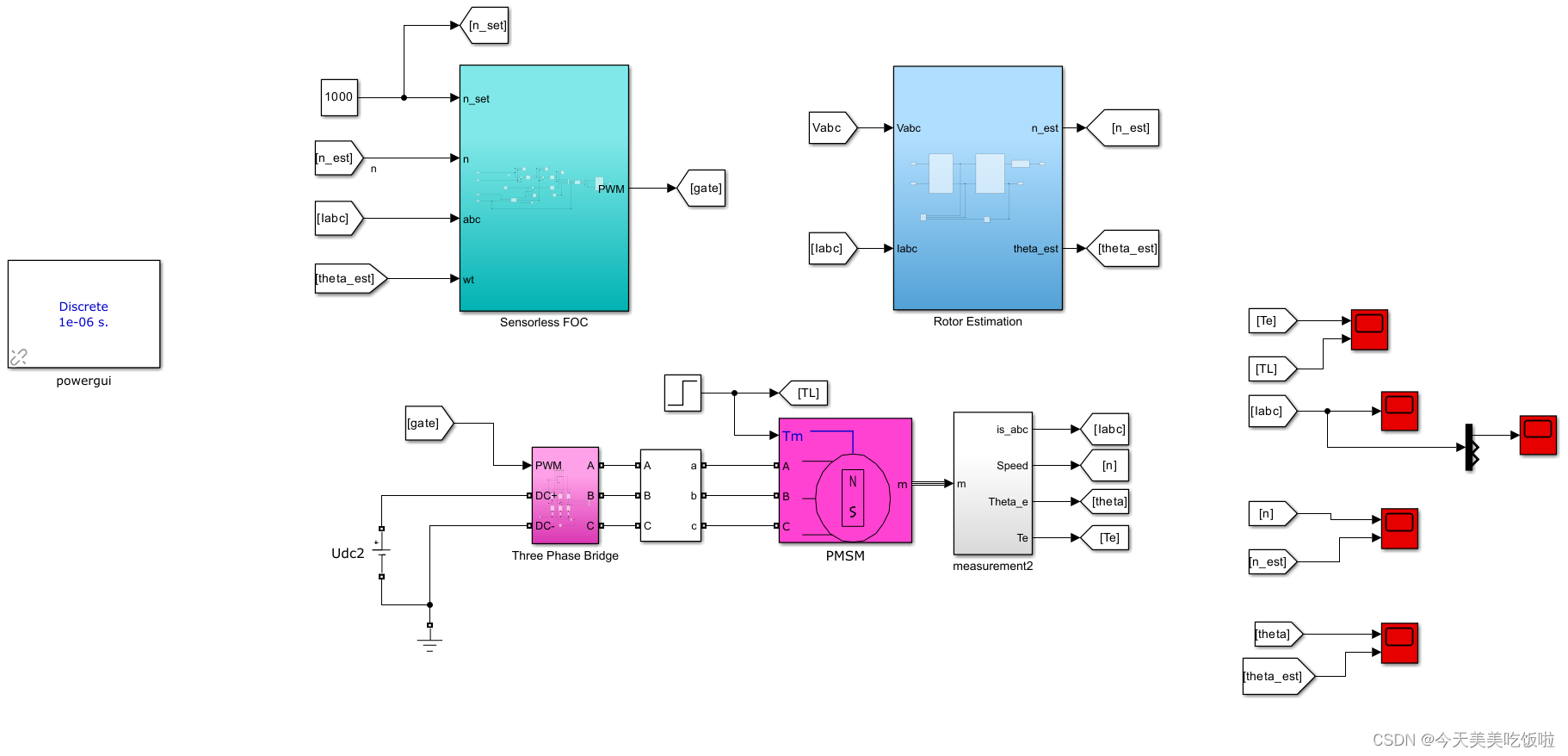
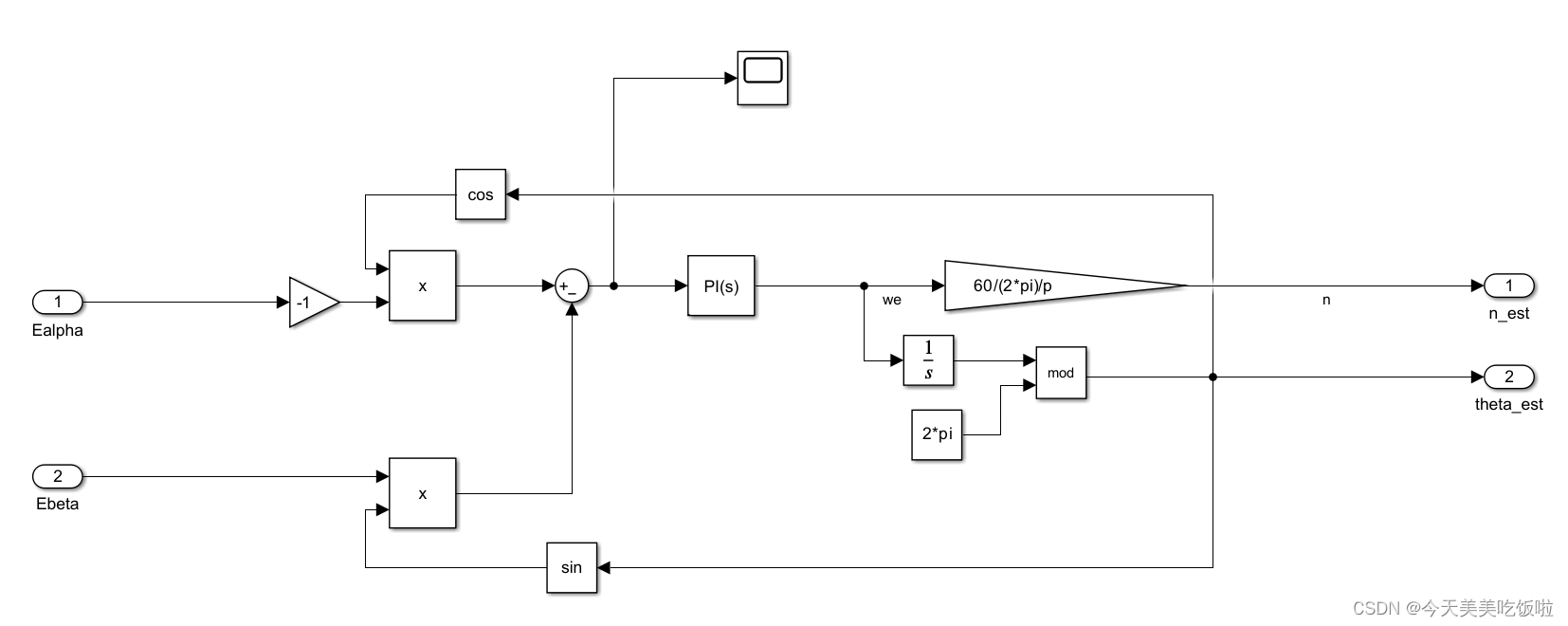
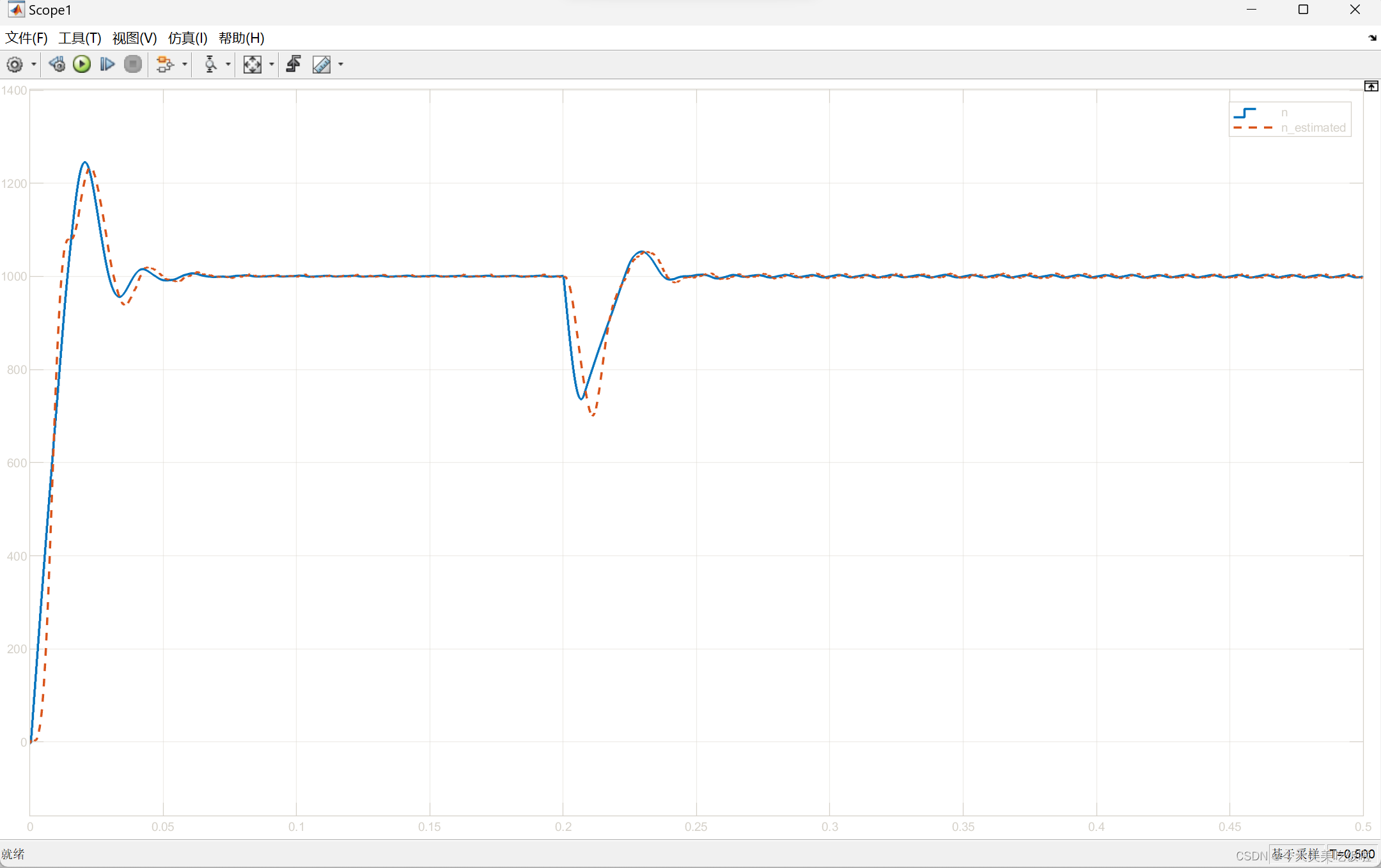
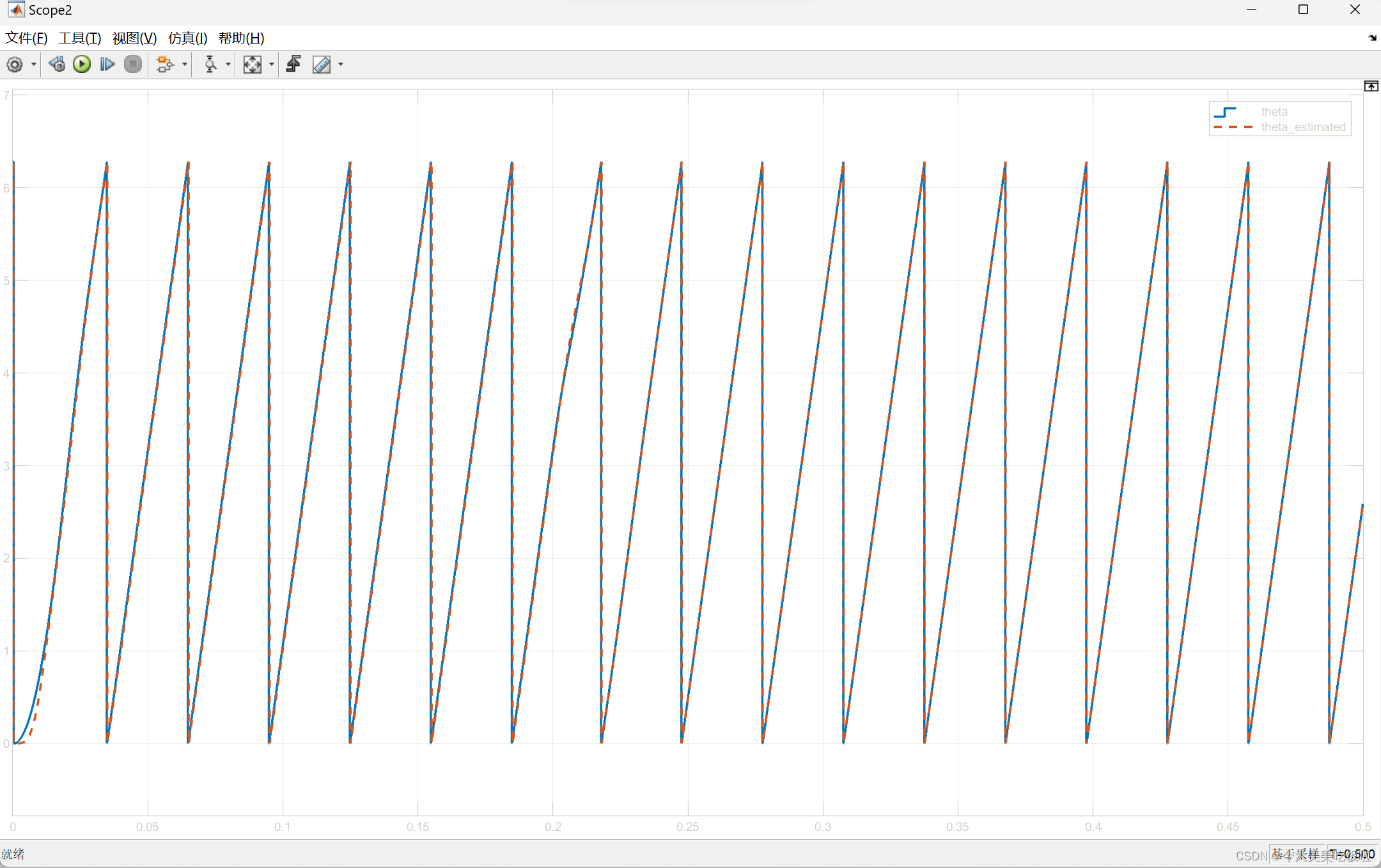
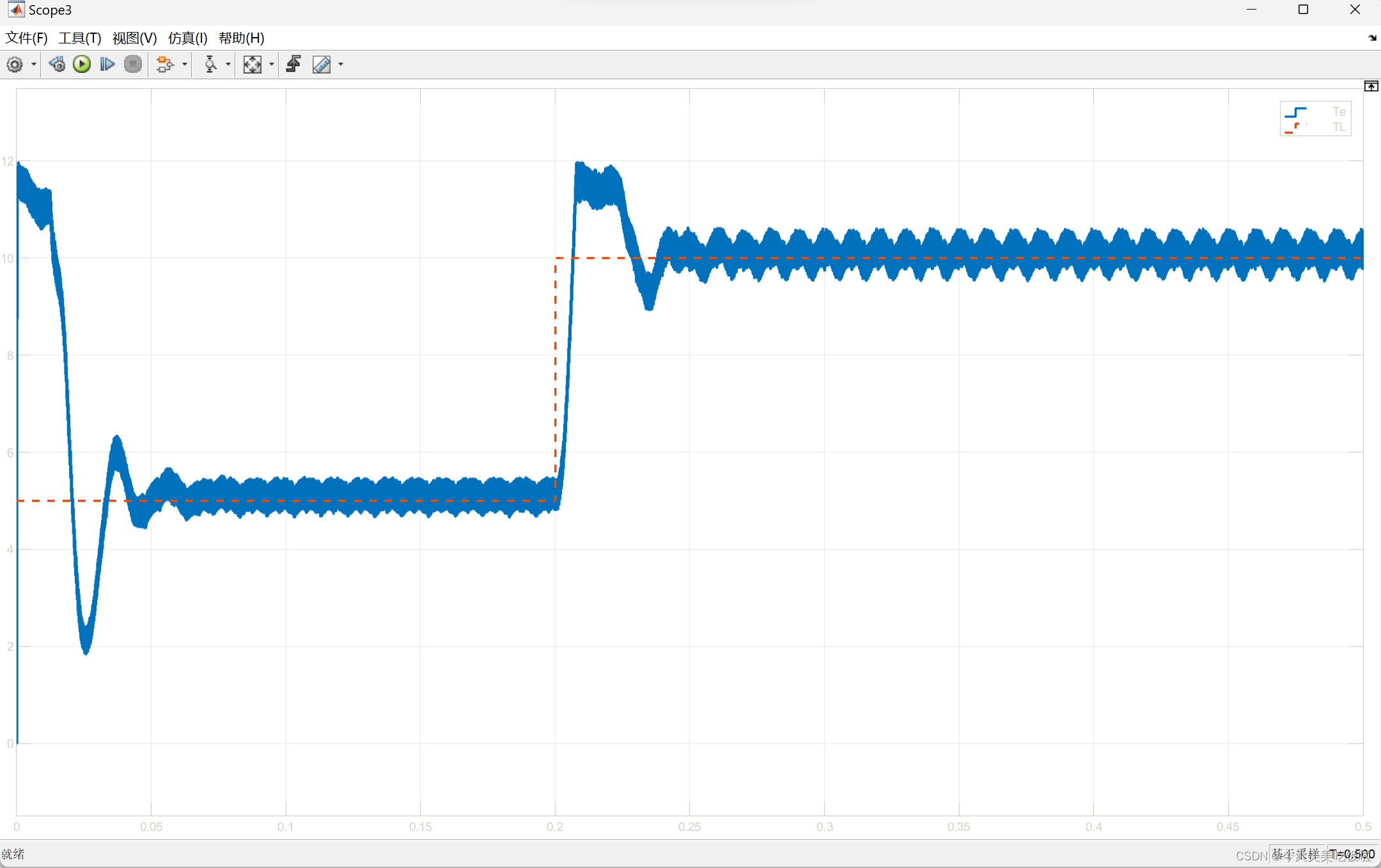
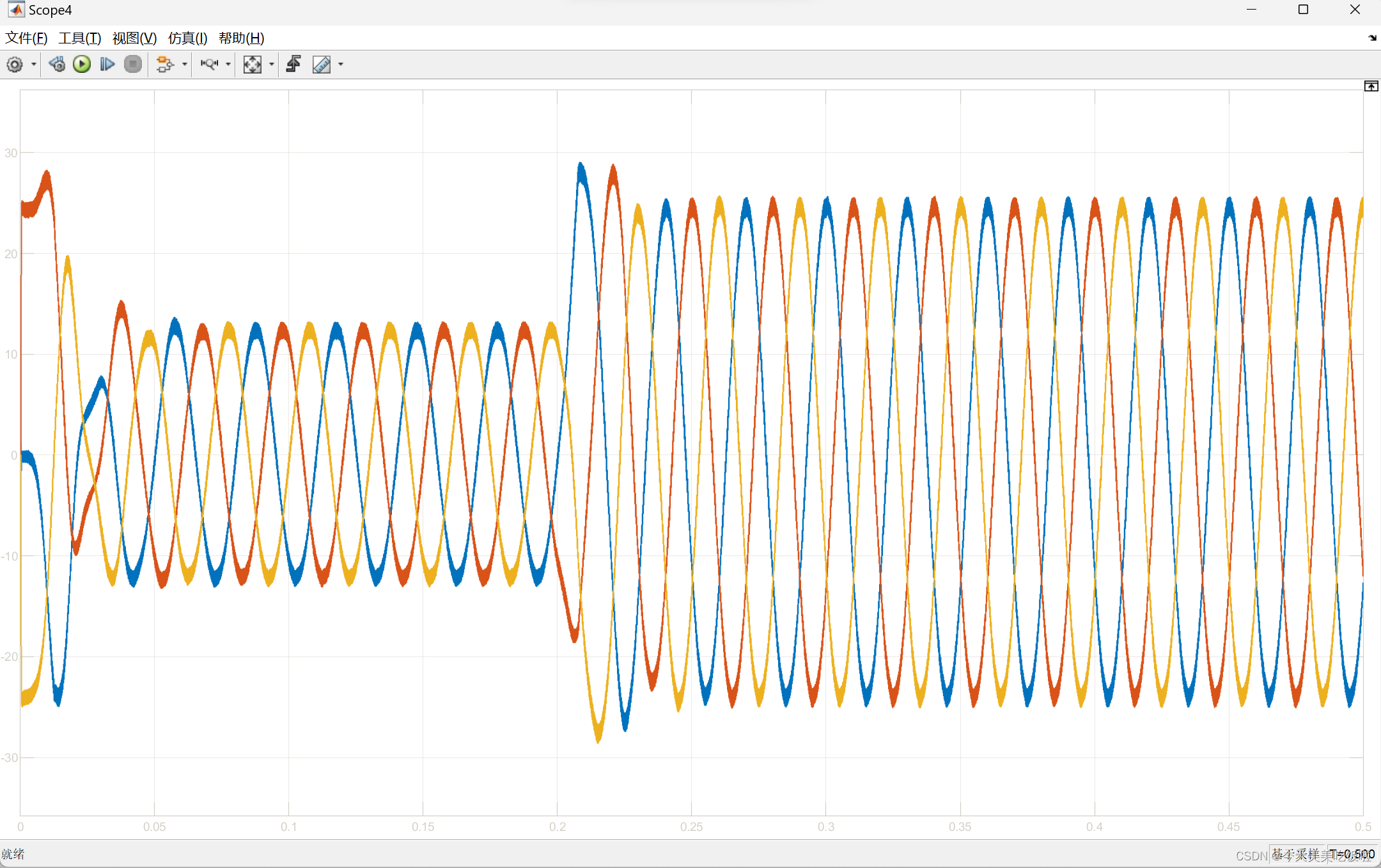
文章目录 前言仿真模型观测器速度观测位置观测转矩波形电流波形 前言 今后是电机控制方向的研究生的啦,期待有同行互相交流。 仿真模型 观测器 速度观测 位置观测 转矩波形 电流波形 查看全文 http://www.lryc.cn/news/179105.html 相关文章: Android Studio之Gradle和Gradle插件的区别 DataExcel控件读取和保存excel xlsx 格式文件 【JavaEE】CAS(Compare And Swap)操作 第三章:最新版零基础学习 PYTHON 教程(第三节 - Python 运算符—Python 中的关系运算符) 【GDB】使用 GDB 自动画红黑树 使用Vue3+elementPlus的Tree组件实现一个拖拽文件夹管理 小谈设计模式(7)—装饰模式 nginx 多层代理 + k8s ingress 后端服务获取客户真实ip 配置 6种最常用的3D点云语义分割AI模型对比 UG NX二次开发(C#)-获取UI中选择对象的handle值 win10,WSL的Ubuntu配python3.7手记 02-Zookeeper实战 【C语言深入理解指针(1)】 模拟实现简单的通讯录 rabbitMQ死信队列快速编写记录 数位dp,338. 计数问题 如何解决git clone http/https仓库失败(403错误) 华为云云耀云服务器L实例评测 | 实例评测使用之硬件性能评测:华为云云耀云服务器下的硬件运行评测 Elasticsearch:使用 Elasticsearch 进行语义搜索 JVM的主要组成及其作用 会议AISTATS(Artificial Intelligence and Statistics) Latex模板参考文献引用问题 2023最新外贸建站:WordPress搭建外贸独立站零基础小白保姆级教程 HTTP请求交互基础(基于GPT3.5,持续更新) 小谈设计模式(6)—依赖倒转原则 JetBrains常用插件 【C++哈希应用】位图、布隆过滤器 Qt 编译纯c的C99的项目, error: undefined reference to `f()‘ TensorFlow入门(五、指定GPU运算) Unity - 实践: Metallic流程贴图 转 Specular流程贴图 第三章:最新版零基础学习 PYTHON 教程(第四节 - Python 运算符—Python 逻辑运算符及示例)