当前位置: 首页 > news >正文 ardupilot开发 ---传感器驱动,外设驱动篇 news 2025/9/7 22:07:02 ardupilot支持不同厂商的传感器,如雷达,声呐,激光,相机等; 支持的通信协议 I2C, SPI, UART (aka Serial) CANBUS 驱动程序的前后台分离 ardupilot中传感器驱动的重要结构是前后分离; Library库调用前端程序; 前端程序调用后端程序; 后端程序一般是个for循环?? 查看全文 http://www.lryc.cn/news/175973.html 相关文章: 二叉树的存储 List 去重的几种方法 UNet网络制作 智能热水器丨打造智能家居新体验 Python 十进制转化二进制1.0(简易版) WebGL 选中一个表面 open ai chartgpt 安装插件 txyz.ai 【算法思想】贪心 freeswitch-01 Zookeeper-集群介绍与核心理论 动态分配的内存位置在哪里? Vue3中的Ref与Reactive:深入理解响应式编程 Windows10/11显示文件扩展名 修改文件后缀名教程 【C++】手撕string(string的模拟实现) 用python3编译cv_bridge 招商信诺人寿基于 Apache Doris 统一 OLAP 技术栈实践 我的python安装在哪儿了?python安装路径怎么查? 视频汇聚/安防监控平台EasyCVR指定到新的硬盘进行存储录像,如何自动挂载该磁盘? 读博时的建议或心得 3分钟,免费制作一个炫酷实用的数据可视化大屏! 自费访学|金融公司高管赴世界名校伯克利交流 Databend 开源周报第112期 如何学习maya mel语言的经验分享 睿趣科技:新手抖音开店卖什么产品好 【新版】系统架构设计师 - 案例分析 - 架构设计<Web架构> 竞赛选题 基于视觉的身份证识别系统 git详细教程 [old]TeamDev DotNetBrowser Crack Zynq-Linux移植学习笔记之63- linux内核崩溃的重启 【精华】ubuntu编译openpose
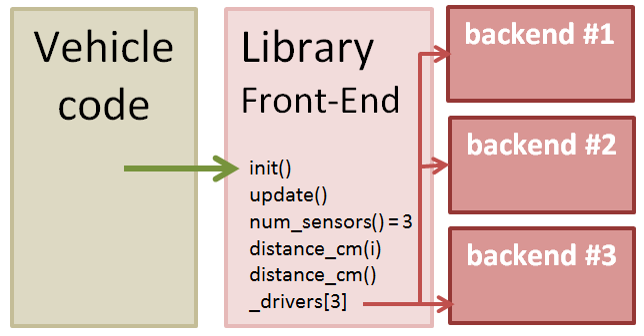
ardupilot支持不同厂商的传感器,如雷达,声呐,激光,相机等; 支持的通信协议 I2C, SPI, UART (aka Serial) CANBUS 驱动程序的前后台分离 ardupilot中传感器驱动的重要结构是前后分离; Library库调用前端程序; 前端程序调用后端程序; 后端程序一般是个for循环?? 查看全文 http://www.lryc.cn/news/175973.html 相关文章: 二叉树的存储 List 去重的几种方法 UNet网络制作 智能热水器丨打造智能家居新体验 Python 十进制转化二进制1.0(简易版) WebGL 选中一个表面 open ai chartgpt 安装插件 txyz.ai 【算法思想】贪心 freeswitch-01 Zookeeper-集群介绍与核心理论 动态分配的内存位置在哪里? Vue3中的Ref与Reactive:深入理解响应式编程 Windows10/11显示文件扩展名 修改文件后缀名教程 【C++】手撕string(string的模拟实现) 用python3编译cv_bridge 招商信诺人寿基于 Apache Doris 统一 OLAP 技术栈实践 我的python安装在哪儿了?python安装路径怎么查? 视频汇聚/安防监控平台EasyCVR指定到新的硬盘进行存储录像,如何自动挂载该磁盘? 读博时的建议或心得 3分钟,免费制作一个炫酷实用的数据可视化大屏! 自费访学|金融公司高管赴世界名校伯克利交流 Databend 开源周报第112期 如何学习maya mel语言的经验分享 睿趣科技:新手抖音开店卖什么产品好 【新版】系统架构设计师 - 案例分析 - 架构设计<Web架构> 竞赛选题 基于视觉的身份证识别系统 git详细教程 [old]TeamDev DotNetBrowser Crack Zynq-Linux移植学习笔记之63- linux内核崩溃的重启 【精华】ubuntu编译openpose