【视觉SLAM入门】8. 回环检测,词袋模型,字典,感知,召回,机器学习
"见人细过 掩匿盖覆”
- 1. 意义
- 2. 做法
- 2.1 词袋模型和字典
- 2.1.2 感知偏差和感知变异
- 2.1.2 词袋
- 2.1.3 字典
- 2.2 匹配(相似度)计算
- 3. 提升
前言: 前端提取数据,后端优化数据,但误差会累计,需要回环检测构建全局一致的地图;
1. 意义
- 通俗的讲,机器人两次经过同一个场景,为了检测是同一个场景,这就是回环检测。它可以用来构建全局一致的地图。有了时隔更加久远的约束,一定程度消除累计飘移。形象的想弹簧,就是把原来已经优化好的,拉的更贴近真实位置。
- 回环检测还可以做重定位,在跟踪丢失的时候。
2. 做法
以下是几种做法:
- 取当前图像和历史所有图像一一进行特征提取并比对,通过匹配的数量确定。O( n 2 n^2 n2),缺点资源;
- 还是上边的方法,但不一一匹配,随机抽取,可检测到的帧少很多;
- 里程计配合给一个大致位置,这里的进行回环检测,缺点里程计自带误差,只能小范围;
- 基于外观,主流,其中一种就是词袋模型。
2.1 词袋模型和字典
2.1.2 感知偏差和感知变异
感知偏差(假阳性),感知变异(假阴性)

-
准确率(检测正确的数量 / 检测的总数量): P r e c i s i o n = T P / ( T P + F P ) Precision = TP/(TP+FP) Precision=TP/(TP+FP)
-
召回率(实际检测出来的数量 / 理应检测出来的数量): R e c a l l = T P / ( T P + F N ) Recall = TP/(TP+FN) Recall=TP/(TP+FN)
一般这两个数据呈矛盾,不取极端,只说在recall为多少,pre为多少时候效果最好,一般我们对P的要求更高。这是回环检测的严格性导致的。
2.1.2 词袋
- 字典实际就是对所有图片中的特征进行提取,比如"人","车"等,它们是单词,对全部图像特征提取所有单词(特征)后构成一个字典。
- 词袋说的是一帧图像中,能够提取出来的单词。
比如现在有一本4个特征的字典: D = [ x 1 , x 2 , x 3 , x 4 ] D = [x_1,x_2,x_3,x_4] D=[x1,x2,x3,x4]
而我们有两个 x 1 x_1 x1 一个 x 3 x_3 x3 特征的图像,那用词袋可以记为:
A = 2 ⋅ x 1 + 0 ⋅ x 2 + 1 ⋅ x 3 + 0 ⋅ x 4 A = 2\cdot x_1 + 0\cdot x_2 + 1\cdot x_3 + 0\cdot x_4 A=2⋅x1+0⋅x2+1⋅x3+0⋅x4
它的向量就是
A = [ 2 , 1 , 0 , 0 ] A = [2,1,0,0] A=[2,1,0,0]
那么检测两个图像,则举例可以用
s ( a , b ) = 1 − 1 W ∣ ∣ a − b ∣ ∣ 1 s(a,b) = 1 - \frac{1}{W}||a-b||_1 s(a,b)=1−W1∣∣a−b∣∣1
L1范数,各元素绝对值之和,向量完全一样则得到1,是回环。
2.1.3 字典
字典里的单词是某一类特征的组合,类似于一个聚类问题,UML(无监督学习常见问题)。
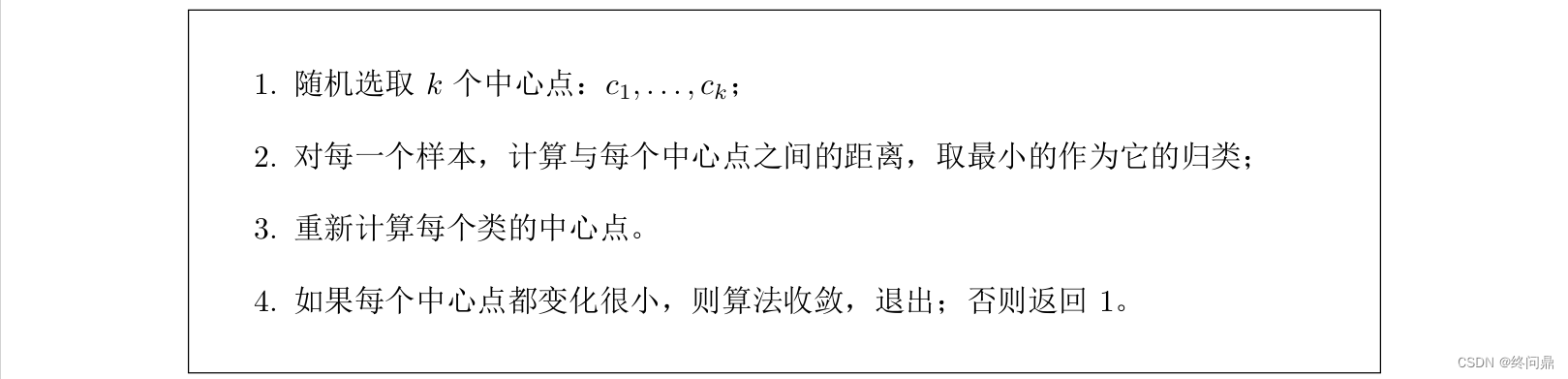
- 假设要做 k k k 个单词的字典,可以用K-means,K-means++等实现,这里以K-means(均值)为例:
字典规模大,要在字典中查找单词属于哪个,逐个查找复杂度 O ( n ) O(n) O(n),参考数据结构,这里有很多优化方法,这里以最简单的K叉树为例去优化字典结构:
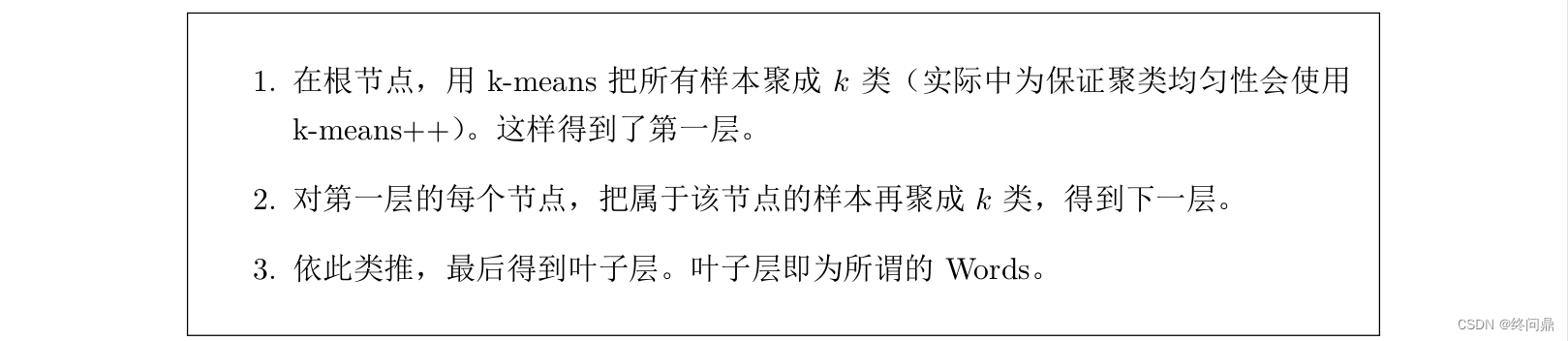
又很像K-D树,聚类类中类,聚中聚哈哈。一棵深度为 d d d , 分支为 k k k 的树,可以容纳, k d k^d kd 单词。
2.2 匹配(相似度)计算
两个概念:
- TF(Term Frequency)译频率: 某单词在一副图像中经常出现,它的区分度就高;
- IDF(Inverse Document Frequency)逆文档频率: 某单词在字典中出现的频率低,它的区分度就高;
-
在做字典时候,用IDF,假设所有特征总数为 n n n, 当前要统计的单词特征 w i w_i wi 的数量为 n i n_i ni, 则此单词的IDF为:
I D F i = l o g n n i IDF_i = log \frac{n}{n_i} IDFi=lognin -
对一副图像而言,假设特征/单词 w i w_i wi 出现了 n i n_i ni 次,而这幅图一共出现的单词数量为 n n n,则TF为:
T F i = n i n TF_i = \frac{n_i}{n} TFi=nni -
基于以上知识,一个图像的特征点可以对应到很多单词,则它的词袋(BOW)为:
A = ( w 1 , η 1 ) , ( w 2 , η 2 ) , . . . , ( w N , η N ) ⟺ v A A = {(w_1, \eta _1), (w_2, \eta _2), ... , (w_N, \eta _N)} \iff v_A A=(w1,η1),(w2,η2),...,(wN,ηN)⟺vA
词袋中有很多0值,因为它不能包含字典中所有词。 -
计算两图词袋的差异(匹配度),给出一种方式(一范数),还有很多:
s ( v A − v B ) = 2 ∑ i = 1 N ∣ v A i ∣ + ∣ v B i ∣ − ∣ v A i − v B i ∣ s(v_A - v_B) = 2\sum^N_{i=1}|v_{Ai}| +|v_{Bi}|-|v_{Ai}-v_{Bi}| s(vA−vB)=2i=1∑N∣vAi∣+∣vBi∣−∣vAi−vBi∣
3. 提升
对于回环检测,有几点可以提升的部分:
- 增加字典规模
- 相似性评分处理
对于环境外观相似,比如教室同款椅子很多,利用先验的相似度(某时刻关键帧图像与上一时刻关键帧的相似性)进行归一化:
s ( v t , v t j ) ′ = s ( v t , v t j ) / s ( v t , v t − Δ t ) s(v_t,v_{tj})' = s(v_t,v_{tj})/s(v_t,v_{t-\Delta t}) s(vt,vtj)′=s(vt,vtj)/s(vt,vt−Δt)
- 关键帧处理
- 相邻帧肯定满足回环检测条件,因为变化太小,所以回环检测的帧一般稀疏;
- 检测到的回环相邻帧意义不大,一帧就可以优化轨迹,因此会把相近的回环聚类成一类,使算法不会反复检测同一类。
- 验证
词袋没有顺序,相机颠倒也是回环,如何验证?
回环缓存机制是一种,单词检测到的回环不足以构成约束,在一段时间内一直检测到的回环才是正确的回环(时间上的一致性检测)
- 机器学习应用于类别
图像连续变化产生不同类别,甚至可以认为是连续的;
图像间相似性可以利用深度学习方法;
词袋方法的物体识别能力不如神经网络,回环检测类似。