论文解读 | 用于3D对象检测的PV-RCNN网络原创
原创 | 文 BFT机器人

01
背景
本文的背景涉及到3D物体检测,这是一个在自动驾驶和机器人等领域应用广泛的重要问题。在这些领域,LiDAR传感器被广泛用于捕捉3D场景信息,生成不规则且稀疏的点云数据。这些点云数据提供了理解和感知3D场景的关键信息。然而,由于点云数据的不规则性和稀疏性,从中提取有用的特征并进行准确的物体检测是一项具有挑战性的任务。
因此,本文提出了一种新颖的点-体积综合网络框架,旨在提高3D物体检测的性能。为实现这一目标,本文引入了一种新的点云特征学习方法。这个方法的设计旨在克服点云数据的不规则性和稀疏性,以更好地捕捉物体的关键特征。通过将点云特征与体积数据进行综合,该网络框架有望提高物体检测的准确性和鲁棒性。
02
创新点
1.PV-RCNN框架:该论文引入了PV-RCNN框架,它巧妙地结合了基于体素和基于点的方法,以实现3D点云特征学习。这一融合使得3D物体检测性能得以提高,同时也在内存消耗方面具备可管理性。这个框架有望有效地解决点云数据的复杂性。
2.体素到关键点场景编码:作者提出了一种创新的方法,将多尺度体素特征编码为一组关键点特征。这些关键点特征不仅保留了准确的位置信息,还捕捉到了场景的丰富上下文信息,从而显著提高了3D检测性能。这种编码方法可以有效地捕获不同物体的特征。
3.多尺度RoI特征抽象层:为了更好地处理每个提议中的网格点,论文引入了多尺度RoI特征抽象层,用于汇总来自场景的丰富上下文信息。这有助于实现准确的框细化和置信度预测,提高了检测的准确性。
4.广泛的实验验证:通过在KITTI 3D检测基准测试和Waymo Open数据集上进行广泛的实验,作者证明了PV-RCNN方法的有效性。实验证明,PV-RCNN方法不仅超越了以前的方法,而且在性能上表现出色,进一步验证了该方法的创新性和实用性。
03
算法介绍
这篇论文介绍了PV-RCNN算法,它是一种新颖的点-体积综合网络框架,专用于解决3D物体检测问题。PV-RCNN算法的核心步骤包括以下几个:
1.体素集合抽象:首先,将整个3D场景通过3D体素CNN转换为体素表示。然后,通过体素集合抽象模块,将这些体素编码为一组关键点特征。这些关键点特征既包括了准确的位置信息,又包含了场景的丰富上下文信息。这一步骤有助于在后续处理中更好地捕捉物体特征。
2.3D提议生成:使用体素CNN生成高质量的3D提议,这些提议包含了可能存在于场景中的物体的位置和大小信息。这些提议作为后续处理的输入,有助于确定可能的物体位置。
3.RoI-Grid池化:将关键点特征和3D提议结合起来,使用RoI-Grid池化将关键点特征抽象到RoI-Grid点上。这一步骤有助于提取与提议相关的特征,以进一步分析可能的物体。
4.多尺度RoI特征抽象:使用多尺度RoI特征抽象层,从RoI-Grid点中聚合来自场景的更丰富的上下文信息。这有助于进行准确的边界框细化和置信度预测,以精确地检测物体。
5.检测输出:最后,通过分类和回归头部对RoI-Grid特征进行处理,以输出检测结果。分类用于确定物体的类别,而回归用于精确定位物体的边界框。
通过以上这些步骤,PV-RCNN算法能够高效地结合了体素和点云特征学习的优势,从而显著提高了3D物体检测的性能。这种综合性的框架在处理点云数据的物体检测问题上具有重要的应用前景。
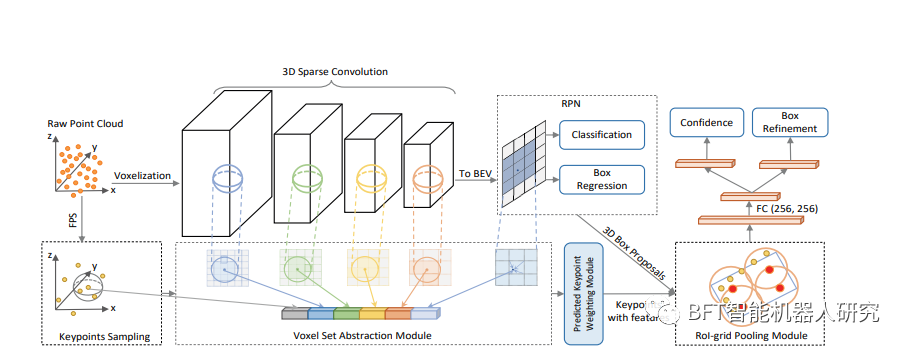
图1 PV-RCNN的总体架构
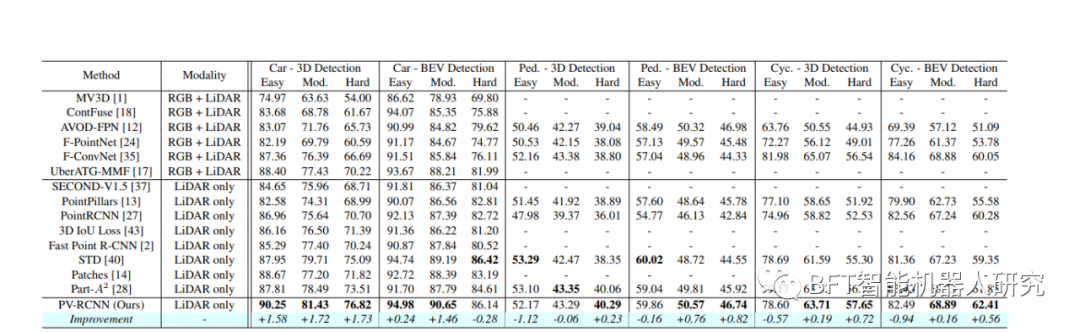
图2 在KITTI测试集上的性能比较
04
总结
本文提出的PV-RCNN算法是一种创新的点-体积综合网络框架,用于3D物体检测。经过在KITTI 3D检测基准测试和Waymo Open数据集上广泛的实验验证,PV-RCNN方法表现出了显著的有效性和性能优势,超越了以前的方法。具体而言,PV-RCNN算法具备以下重要结论:
1.PV-RCNN成功利用了基于体素和基于点的方法,以进行3D点云特征学习,从而有效提升了3D物体检测性能。
2.PV-RCNN算法通过引入体素集合抽象和RoI-Grid池化等关键技术,实现了在内存消耗可控的情况下保持检测性能的目标。
3.在KITTI 3D检测基准测试和Waymo Open数据集上的广泛实验结果表明,PV-RCNN算法在3D物体检测方面表现出卓越性能,超越了以前的方法,而且在各种难度级别和不同数据集上都展现出了出色的泛化能力。
综上所述,PV-RCNN算法是一种高效的3D物体检测方法,具有卓越的性能和泛化能力,适用于自动驾驶、机器人等多个领域的应用。
作者 | qw
排版 | 小河
审核 | 猫
若您对该文章内容有任何疑问,请与我们联系,我们将及时回应。如果想要了解更多的前沿资讯,记得点赞关注哦~