AVL树 模拟实现(插入)
目录
模拟插入节点
左单旋
右单旋
右左双旋
左右双旋
总结
实现
插入实现
左单旋实现
右单旋实现
右左双旋实现
左右双旋实现
AVL树 模拟实现(插入)
AVL 树,是高度平衡二叉搜索树,其主要通过旋转来控制其左右子树的高度不超过1,这样就能达到搜索效率基本等同于满二叉树(O(LogN)),所以 AVL 并不会向普通的搜索树一样,在极端情况下退化为单枝。
首先AVL在平衡的前提下,还要保证其是一颗搜索树,所以在插入的时候还是按照搜索树的插入规则来。
AVL 树的高度就是右子树减左子树的高度。
AVL 树的实现有几种,其中一种是借用平衡因子来查看其是否平衡,如果不适用平衡因子,那么就需要使用高度查看是否平衡,但是加入平衡因子会跟简单一些,所以下面我们实现的AVL 树是借用平衡因子来维持平衡的。
模拟插入节点
如果是第一次插入,以及第二次插入那么和搜索树是一摸一样的,为什么呢?
因为如果是第一次插入,那么就是插入到根节点,所以该是是平衡的,无需做其他的操作来保持其平衡,而第二次插入也是不需要我们做其他操作的,同样是因为第二次插入也是平衡的(左右子树的高度不超过1)。
左单旋
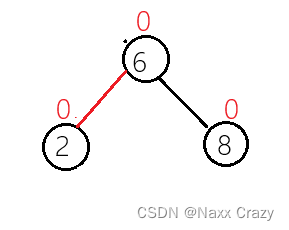
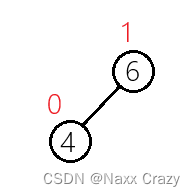
插入两个节点如图所示:
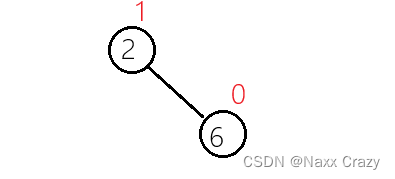
这时候,6 节点的高度就为 0,而 2 节点的高度为 1,因为 6 节点的左右子树的高度都为 0,而 2 节点的右子树的高度为 1,而左子树的高度为 0.
如果是两个节点的话,是无法达到完全平衡的,所以并不是AVL树不想达到完全平衡,而是只有在满二叉树的情况下才能达到完全平衡。
下面如果在插入一个节点,那么就会引发旋转:
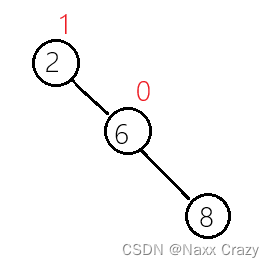
如果这时候插入节点 8,那么首先我们就能看到这棵树已经不平衡了,但是我们要怎么使用平衡因子来控制?
插入节点 8,此时节点 8 的平衡因子肯定是 0,那么现在 8 在节点 6 的右边,所以 6 要对它的平衡因子进行+1操作:
此时节点 6 的平衡因子变为了 1,现在我们想一下,如果平衡因子由 0 变为 1表示的是什么?
节点刚开始的平衡因子是 0 ,说明刚开始的时候该树是平衡的,变为 1说明该树的右子树多增加了一个节点的高度,所以说明该树的高度发生了变化,所以既然该节点的高度发生了变化,那么该节点的父亲节点的高度可能也会发生变化,所以这时候我们需要向上检查父亲节点的高度:

这时候父亲节点的高度变为了 2,说明此时已经不平衡了,那么要怎样旋转?
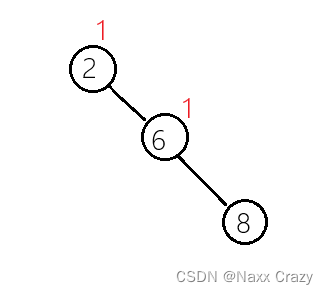
我们发现这样的不平衡是单纯的右边高,所以我们尽可能向左旋转,将高度压下去,也就是使用左单旋:
1. 我们需要将父亲节点(2),的右子树连接到,cur(6) 节点的左子树上
2. 我们将cur(6)节点的左子树,连接成父亲节点(2)
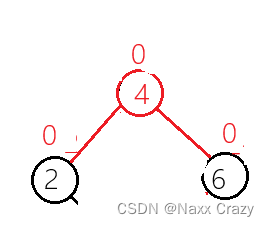
所以旋转结束后就是这样:
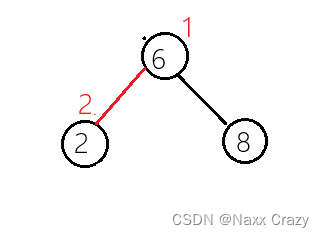
但是我们的平衡因子是不正确的,所以如果我们使用左单旋转,旋转之后我们需要将父亲节点(2),和cur节点(6)的平衡因子变为 0.
上面我们为什么要将cur 节点的左孩子给父亲节点呢?
因为这里我们只是画了一个节点,我们有可能右多个节点,所以我们还需要处理好其他节点,但是由于我们只是对cur 的左子树进行的调换位置,我们并未使其高度发生变化,所以我们也自然不需要对其的平衡因子进行调整:
也就是像我们上图这样,cur节点,还有左子树:
上图就是进行旋转之后的样子,然后进行修正平衡因子(parent 为 0,cur 为 0:
右单旋
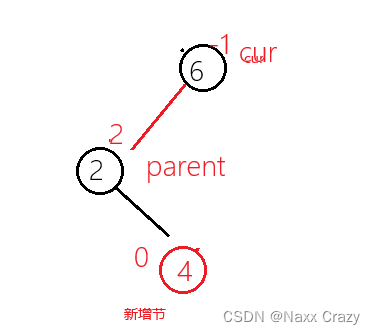
如果我们的方向不同呢?也就是整个树是单纯的左边高:
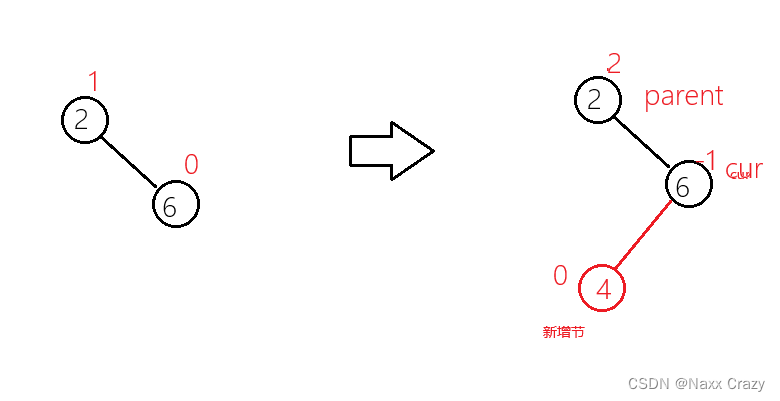
插入节点:
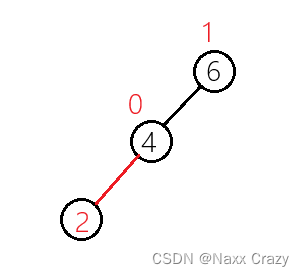
修正平衡因子:
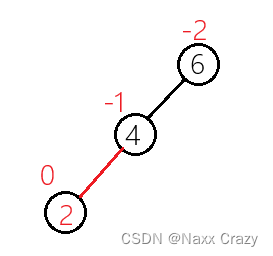
这里我们发现节点 6 已经不平衡了,需要旋转来维持平衡,这时候我们发现它是单纯的左边高,也就是我们需要像右旋转,也就是右单旋:
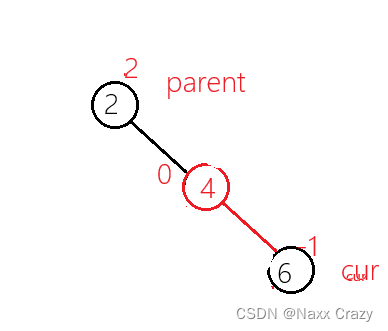
1. 将节点 4 的右子树连接到节点 6 的左子树上
2. 将节点 6 连接到节点 4 的右子树上
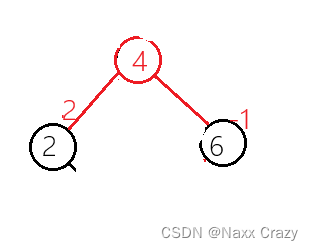
旋转结束后就就是这样:
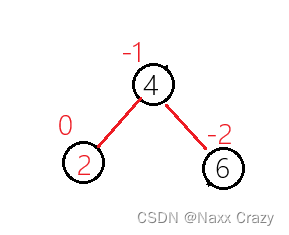
我们还是将parent节点(6)和 cur节点(4)的平衡因子修改为 0.
而这里处理cur节点的右子树的原因和处理左单旋时候的 cur 的左子树是一样的原因。
经过上面的左单旋和右单旋,我们发现:
1. 如果插入节点到当前节点的左子树:那么就让当前节点的平衡因子进行 ‘减减’ 操作
2. 如果插入节点到当前节点的右子树:那么就让当前节点的平衡因子进行 ‘加加’ 操作
3.如果平衡因子由 0 变为 1 或者由 0 变为 -1 ,那么就说明当前节点的左右子树的高度发生的变化,需要对当前节点的父亲节点进行平衡因子的跟新。
4.如果当前节点的平衡因子被跟新为 2 或者 -2 ,那么说明当前节点的左右子树已经不平衡了,需要旋转来调节平衡。
5. 什么时候插入结束?
1)当插入的节点是根节点,那么插入后就可以结束了。
2)插入的节点已经存在
3)插入成功并且修正平衡因子后,父亲的平衡因子变为 0 ,变为 0 说明父亲之前的平衡因子不为 0,而变为 0 说明父亲的高度没有发生变化,所以无需在向上调整,插入也就结束。
4)修正平衡因子后,发现某一节点需要旋转,而旋转并且修正平衡因子后,插入结束。
上面说的修正平衡因子是一个循环的过程,因为在修正平衡因子的时候,可能将父亲的平衡因子由0 变为 1 或者 -1 ,说明父亲的高度变化了,所以此时就需要将父亲给给 cur 然后继续向上调整,还有一个插入结束的调节,就是父亲为空也插入结束了,父亲为空说明为根节点。
6. 判断是左单旋还是右单旋:
1)如果是单纯的左边高,那么就进行右单旋,那么怎么判断是单纯的左边高?单纯的左边高,就是父亲节点的平衡因子为 -2 ,而 cur 节点的平衡因子为 -1.
2)如果是单纯的右边高,那么就进行右单旋,右单旋的特征是,parent 的平衡因子是 2, cur 的平衡因子是 1
右左双旋
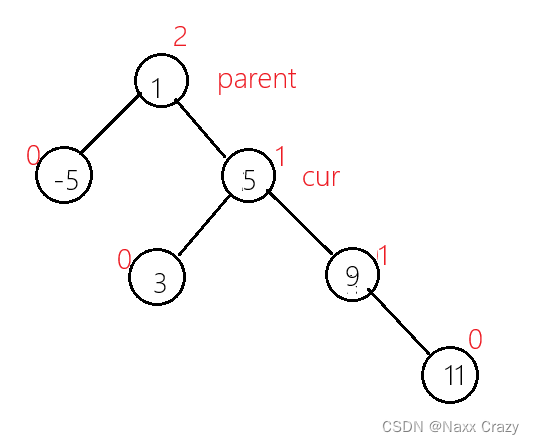
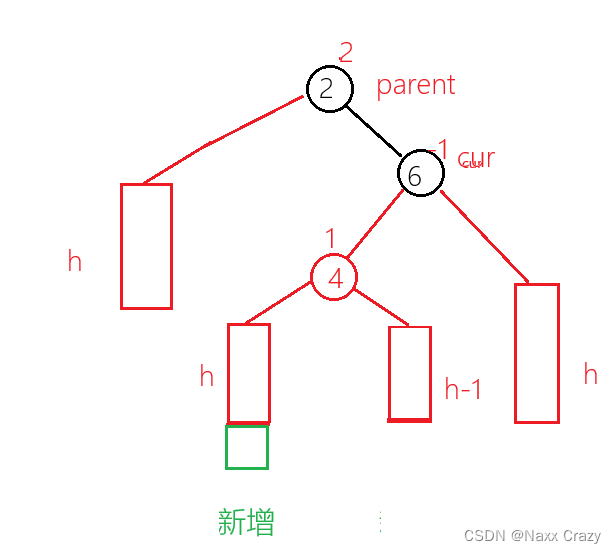
上面我们插入后总是一边高,但是我们还是右其他的情况,也就是下面这种:
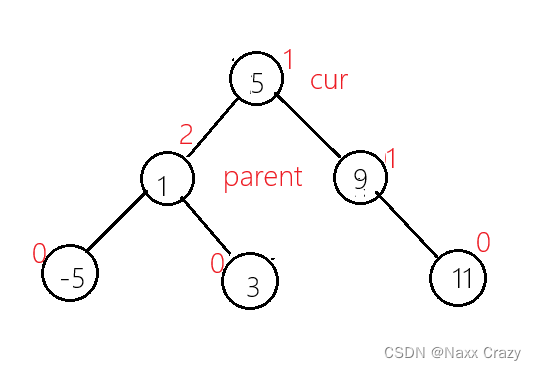
我们这种该怎么样旋转呢?我们可以先试一下左单旋,因为这里我们发现是右边高:
在旋转后,我们发现高度并没有被压缩,而是调了个个,所以如果是这种情况的话,单纯的左或者右是不能完成任务的,而是需要使用双旋。
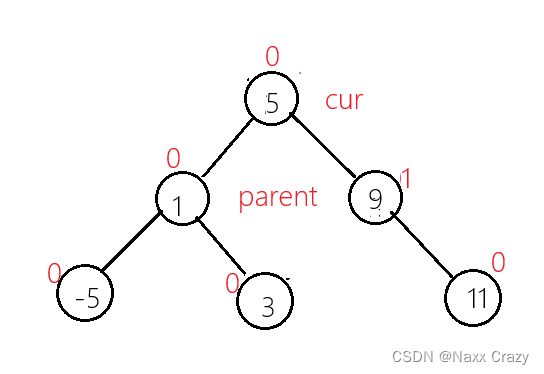
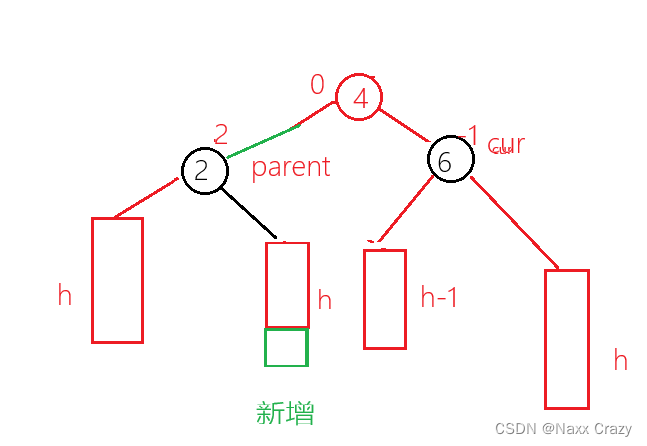
我们可以先对cur 节点进行右单旋:
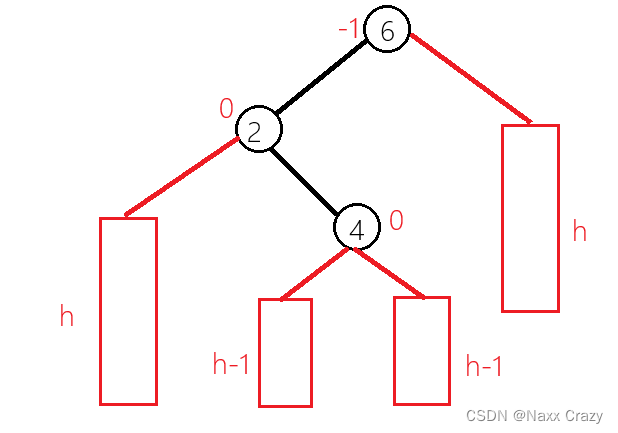
经过我们前面对 cur 节点进行的右单旋,我们此时已经变为一边高了,所以此时我们在对 parent 节点进行左单旋就可以完成压缩高度任务:
我们此时经过旋转后的 parent 和 cur 节点的平衡因子变为 0了:
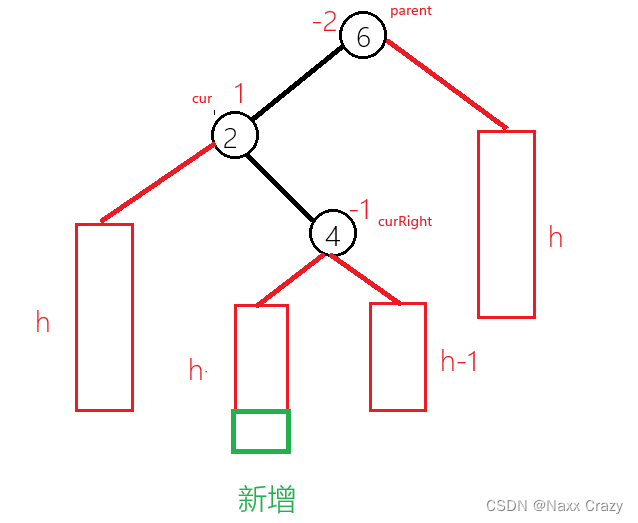
但是这只是我们节点 4 就是新插入的节点,那么假设是其他情况呢?
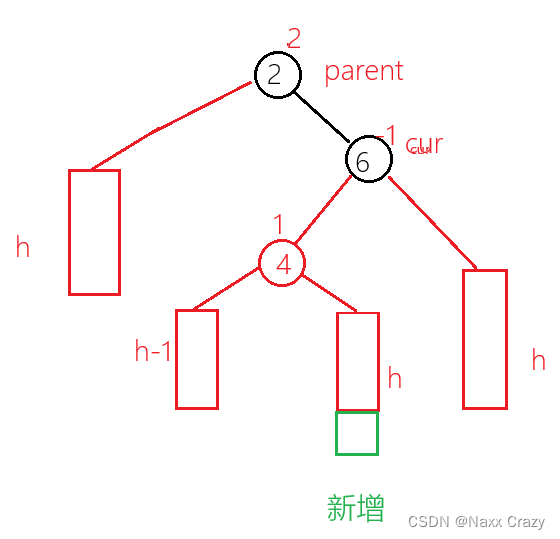
上图是抽象图,可以表示该种情况下所有可能的情况,如果当 h == 0 的时候,就表示的是 4 节点是新增,但是无论 h 是多少,我们都可以使用右左双旋。
首先对该树的cur 节点使用右单旋:
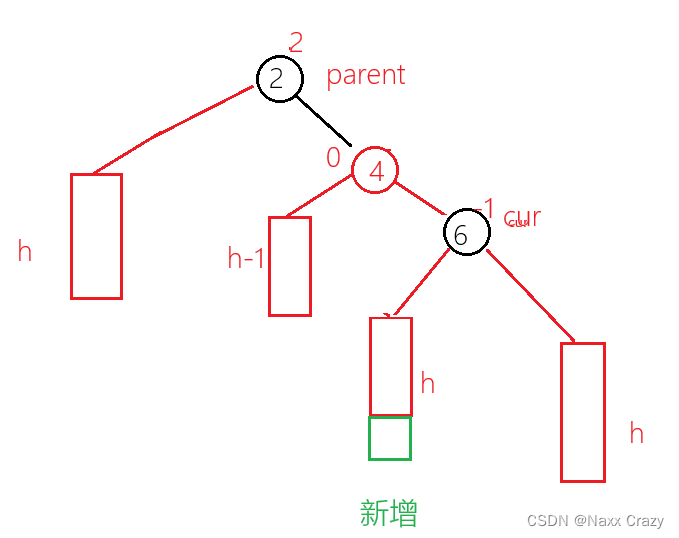
旋转后就变为了这样,也就是单纯的右边高,所以我们在使用左单旋对parent节点:
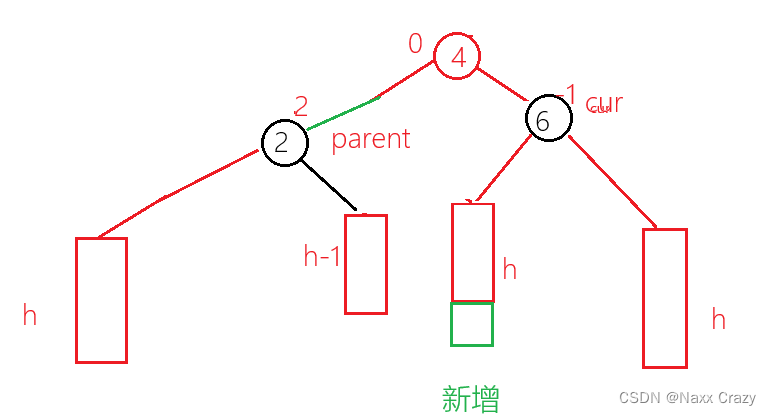
但是这时候 parent 和 cur 节点的平衡因子都是 0,那么我们要怎么调节平衡因子呢?对于这种情况来说,我们是将parent 的平衡因子调整为 -1 ,cur 的平衡因子为 0,即可,但是我们要是插入的位置不是刚开始插入的位置呢?
如果插入到该位置,那么金国旋转后的结果是这样的:
所以此时跟新平衡因子应该是 parent 为 0 ,cur 的平衡因子应该为 1,所以我们插入位置不同的话,我们的平衡因子的跟新策略是不同的,所以我们还要记录插入位置的平衡因子。
我们为了更好的描述,我们将节点 4 称为 curLeft。
我们发现我们在旋转结束后,curLeft 的左右子树被parent 和 cur 代替,而他自己的左子树被分给了parent 的 right 子树 ,而它的右子树被分给了cur 的 left 子树,所以我们只需要知道 curRight 的平衡因子,我们也就可以将parent 和 cur 的平衡因子跟新正确。
上面我们一直都没有说 curLeft 的平衡因子,其实curLeft 的平衡因子在第一次右单旋的时候就被跟新为了 0 ,而旋转结束后,curLeft 的平衡因子也就应该是 0.
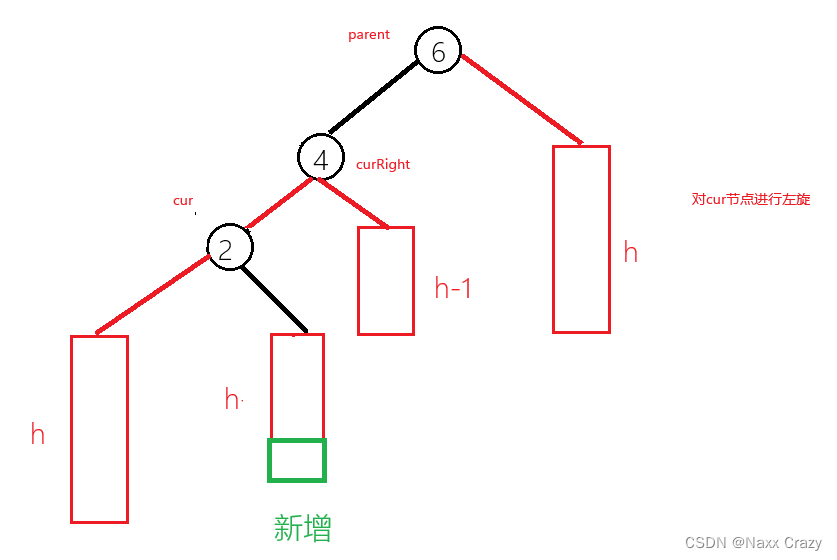
左右双旋
这里我们就直接使用抽象图来描述了。
以上图为例,我们要插入一个值:
现在我们发现是左边高,但是我们知道这种情况下,我们单纯的使用右单旋是解决不了问题的,所以我们还是选哟使用双旋,也就是左右双旋,我们先对cur 节点进行左单旋,然后对parent 进行右单旋:
旋转后,我们发现现在是单纯的左边高,所以我们对 parent 节点使用右单旋:
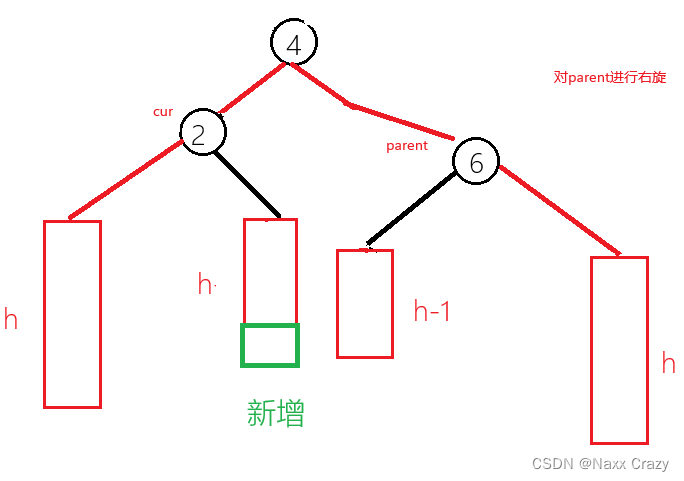
这时候的 parent cur 以及 curRight 的平衡因子都被跟新为 0了 ,但是都是 0 并不正确,而是也像我们前面的右左双一样,需要看 curRight 的平衡因子:
1. 如果插入到 curRight 的keft,那么 cur 的平衡因子就是 0 ,parent 的平衡因子为 1。
2. 如果插入到 curRight 的 right ,那么 cur 的平衡因子就是 -1,parent 的平衡因子就是 0。
总结
- 如果 parent 的平衡因子为 2 ,cur 的平衡因子为 1,那么使用的是左单旋,将 parent 和 cur 的平衡因子都跟新为 0.
- 如果 parent 的平衡因子为 -2 ,cur 的平衡因子为 -1,那么使用的是右单,将 parent 和 cur 的平衡因子都跟新为 0.。
- 如果 parent 的平衡因子为 2 ,cur 的平衡因子为 -1,那么使用的是右左双旋 平衡因子: 如果curLeft 的平衡因子为 1 ,那么就将parent 的平衡因子置为 -1,cur 的平衡因子置为 0,curLeft 的平衡因子为 0 如果curLeft 的平衡因子为 -1 ,那么就将parent 的平衡因子置为 0,cur 的平衡因子置为 1,curLeft 的平衡因子为 0 如果curLeft 的平衡因子为 0 ,那么就将parent 的平衡因子置为 0,cur 的平衡因子置为 0,curLeft 的平衡因子为 0
- 如果 parent 的平衡因子为 -2 ,cur 的平衡因子为 1,那么使用的是左右双旋 平衡因子: 如果curRight的平衡因子为 1 ,那么就将parent 的平衡因子置为 0,cur 的平衡因子置为 -1,curRight的平衡因子为 0 如果curRight的平衡因子为 -1 ,那么就将parent 的平衡因子置为 1,cur 的平衡因子置为 0,curRight的平衡因子为 0 如果curRight的平衡因子为 0 ,那么就将parent 的平衡因子置为 0,cur 的平衡因子置为 0,curLeft 的平衡因子为 0
实现
上面大概率是把思路都说明白了,下面开始看一下实现:
插入实现
首先我们先看一下AVLTreeNode:
对于该节点,我们需要一个存储值的变量,我们还需要三个指针,其中一个 left,还有一个 right,还有一个 parent,这里需要parent 是因为我们需要找找到它的父亲节点,还需要一个平衡因子
template<class K, class V>
struct TreeNode
{pair<K, V> _kv;TreeNode<K, V>* _left;TreeNode<K, V>* _right;TreeNode<K, V>* _parent;int _balance;TreeNode(const pair<K, V>& kv):_kv(kv), _left(nullptr), _right(nullptr), _parent(nullptr),_balance(0){}
};这里我们将存储值的变量之间设置为了 kv 结构,因为这样既可以适用于 set,也适用于 map.
下面就是插入:
插入的话,先按照搜索树的插入节点,也就是插入插入位置,然后记录其父亲节点:
if (_root == nullptr){_root = new Node(kv);return true;}Node* cur = _root;Node* parent = nullptr;while (cur){if (kv.first < cur->_kv.first){parent = cur;cur = cur->_left;}else if (kv.first > cur->_kv.first){parent = cur;cur = cur->_right;}else{// 重复了,插入失败return false;}}// 插入数据cur = new Node(kv);if (kv.first < parent->_kv.first){//维护三叉链parent->_left = cur;cur->_parent = parent;}else{//维护三叉链parent->_right = cur;cur->_parent = parent;}等 cur 节点插入后,开始修正并检查平衡:
//检查平衡while (parent){//维护平衡因子// 平衡因子=右子树高度-左子树高度if (cur == parent->_left){parent->_balance--;}else{parent->_balance++;}// 检查 parent 的平衡因子// 如果为 0 说明parent 这颗树以及平衡,无需检查// 如果为 1/-1 说明 parent 的平衡发生了变化,说明需要检查 parent 的parent 的平衡因子// 如果为 2/-2 说明这棵树已经不平衡了,需要旋转if (parent->_balance == 0){//该树已经平衡break;}else if (parent->_balance == 1 || parent->_balance == -1){// 说明该树的高度发生变化,需要检查 parent 的 parent 的平衡因子,所以需要向上传递cur = parent;parent = parent->_parent;}else if (parent->_balance == 2 || parent->_balance == -2){// 说明该树需要旋转保持平衡if (parent->_balance == 2 && cur->_balance == 1){// 左单旋RotateL(parent);break;}else if (parent->_balance == -2 && cur->_balance == -1){// 右单旋RotateR(parent);break;}else if (parent->_balance == 2 && cur->_balance == -1){// 右左双旋RotateRL(parent);break;}else if (parent->_balance == -2 && cur->_balance == 1){// 左右双旋RotateLR(parent);break;}else{assert(0);}}else{// 不能出现该种情况assert(0);}}
上面就是修正并且检查平衡,那么我们看一下应该怎么样旋转:
左单旋实现
实际上,左单旋并不是像我们说的那样,只有我们前面模拟插入的时候的两步
主要步骤:
1. 将 parent 的 right 连接成 cur 的 left
2. 将 cur 的 left 连接成 parent
3. 维护三叉链
实际上我们还需要维护三叉链,也就是他们的父亲节点,。
// 左单旋void RotateL(Node* parent){Node* cur = parent->_right;Node* curLeft = cur->_left;parent->_right = curLeft;if (curLeft){curLeft->_parent = parent;}cur->_left = parent;Node* pparent = parent->_parent;parent->_parent = cur;if (pparent == nullptr){// parent 就是根节点_root = cur;cur->_parent = nullptr;}else{if (parent == pparent->_left){pparent->_left = cur;}else{pparent->_right = cur;}cur->_parent = pparent;}parent->_balance = 0;cur->_balance = 0;}右单旋实现
主要步骤:
1. 将 parent 的 left 链接到 cur 的 right
2.将 cur 的 left 链接到 parent
3. 维护其三叉链
//右单旋void RotateR(Node* parent){Node* cur = parent->_left;Node* curRight = cur->_right;parent->_left = curRight;if (curRight){curRight->_parent = parent;}cur->_right = parent;Node* pparent = parent->_parent;parent->_parent = cur;if (pparent == nullptr){// 说明 parent 是根节点_root = cur;cur->_parent = nullptr;}else{if (parent == pparent->_left){pparent->_left = cur;}else{pparent->_right = cur;}cur->_parent = pparent;}parent->_balance = 0;cur->_balance = 0;}右左双旋实现
主要步骤:
1. 对 cur 节点进行右旋
2. 对 parent 节点进行左旋
3. 修正平衡因子,这个我们前面总结过了
void RotateRL(Node* parent){//先对 cur 节点进行右单旋//在对 parent 节点进行左单旋Node* cur = parent->_right;Node* curLeft = cur->_left;int balance = curLeft->_balance;RotateR(cur);RotateL(parent);//旋转后维护平衡因子//这里右几种可能://1. curLeft 节点的平衡因子为 0//2. curLeft 节点的平衡因子为-1//3. curLeft 节点的平衡因子为 1// 这里发现每一次旋转结束后,curRight 节点的左树给了parent,右树给了 cur,// 所以这里需要的以区分新增节点插入到了 curRight 节点的左是右// 记录该平衡因子主要是为了维护旋转后的平衡因子if (balance == 0){// curRight 就是新增节点,所以cur,parent,curRight 的平衡因子都为 0cur->_balance = 0;parent->_balance = 0;curLeft->_balance = 0;}else if (balance == 1){// 新增在了右边,所以cur,parent,curRight 的平衡因子分别为 0,-1,0cur->_balance = 0;parent->_balance = -1;curLeft->_balance = 0;}else if (balance == -1){// 新增在了左边,所以cur,parent,curRight 的平衡因子分别为 1,0,0cur->_balance = 1;parent->_balance = 0;curLeft->_balance = 0;}else{assert(0);}}左右双旋实现
主要步骤:
1. 对 cur 节点进行左旋
2. 对 parent 节点进行右旋
3. 修正平衡因子,这个我们前面总结过了
// 左右双旋void RotateLR(Node* parent){Node* cur = parent->_left;Node* curRight = cur->_right;int balance = curRight->_balance;RotateL(cur);RotateR(parent);if (balance == 0){cur->_balance = 0;parent->_balance = 0;curRight->_balance = 0;}else if (balance == -1){cur->_balance = 0;parent->_balance = 1;curRight->_balance = 0;}else if (balance == 1){cur->_balance = -1;parent->_balance = 0;curRight->_balance = 0;}}