SLAM从入门到精通(ROS安装)
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】
ROS科研上面用的多,实际生产其实用的也不少。它本身还是很好的应用框架。当然,它对于很多初学的同学来说还是很友好的。学完之后,可以直接port到嵌入式设备上面进行使用。只是,如果要把ROS真正部署到实际的项目中,有几个问题需要解决。
第一个问题,那就是学会添加功能补丁、修补bug。很多的开源包,或多或少有一点bug,这些代码当初只是为了科研使用,本身并没有考虑那么仔细。所以,要为了杜绝各种corner case失效的情况,就必须要对之前代码中没有考虑的情形加上patch补丁,这样系统才能稳定运行。
第二个问题,那就是性能优化和提高。之前所有的代码几乎都是由cpu完成的,而ROS服务的领域是机器人,这中间对于速率和性能其实是有要求的。所以简简单单port c++代码,有的时候效果并不好,所以这个时候就要修会使用硬件条件来加速。该升级cpu升级cpu,该转移到fpga计算转移到fpga,该使用gpu使用gpu,反正只要能提高实时性,大家可以根据自己的情况灵活进行处理。
第三个问题,添加新算法、新设备。ROS本身只是一个框架,不一定能包含所有的算法和设备驱动。所以这个时候,我们看到了新的paper,发现了更好的传感器设备,就要学会自己在ROS平台上开发算法和驱动设备。这样ROS不再是一个简简单单的科研平台,它还具有了生产属性,可以为我们实际生产环境所使用了。
今天我们就来看看,如何安装ROS。

1、安装ubuntu
ROS本身是建立在linux系统之上的,所以在此之前,我们需要先安装一个linux系统。这里,可以选择ubuntu 20.04 64位系统,用virtualbox进行安装。
有一点需要注意的就是,ROS涉及的软件和测试包比较多,所以空间最好大一点。省的后期出现空间不够的情况下。一般情况下认为,不能低于30G大小。
2、打开virtualbox的增强模式
在ubuntu虚拟机里面安装增强模式之后,虚拟机就可以全屏显示了。

3、打开virtualbox双向拷贝功能
打开了双向拷贝,不管是host往虚拟机拷贝字符,还是虚拟机往host拷贝字符,就都非常方便了。

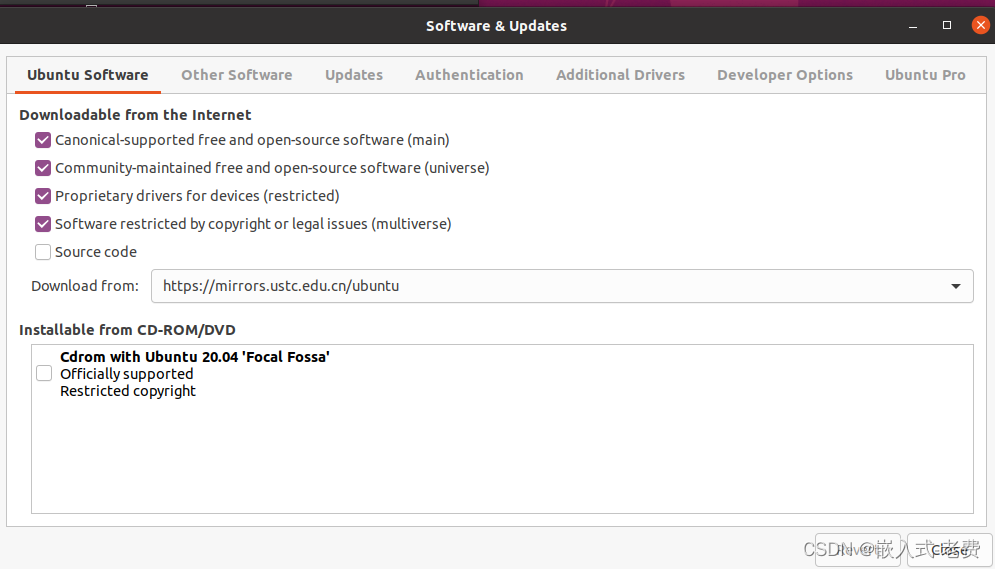
4、打开软件更新,将软件源设置成ustsc
换软件源,主要是为了ubuntu下面apt-get下载的速度可以更快。这样就不必要到ubuntu的官网去下载软件了。
5、添加ROS源和keys
之前的软件源是为了下载一般的软件,但是不一定有ROS软件。所以这里还需要添加ROS源和keys。首先,添加ROS源,
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
接着配置keys,
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
这个时候,没有什么问题的话,就可以update一下了,
sudo apt-get update6、安装ROS软件
每一个ubuntu都有一个匹配的ROS,而ubuntu 20.04匹配的版本就是noetic。所以我们直接安装noetic全家桶就可以了。安装的软件包比较多,一般会有1000多个,稍微等待下即可。
sudo apt-get install ros-noetic-desktop-full7、在启动脚本里面添加ROS环境设置
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
8、安装构建依赖项
有一部分开发可能涉及到python脚本的编写。所以这部分软件也需要安装下,
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential9、安装rosdepc并初始化
安装ROS系统第一次用的时候,一般需要rosdep设置下。但是rosdep执行的时候,通常会被hang注,这主要是因为相关的资源无法从国外下载。所以,这里可以通过rosdepc来替代,效果是一样的,
sudo apt-get install python3-pip
sudo pip3 install rosdepc
sudo rosdepc init
rosdepc update
10、启动熟悉的小乌龟程序
学过ROS的同学都知道,一般确认ROS有没有安装好,启动一下小乌龟程序就好了。第一步,启动roscore,
roscore第二步,打开含有小乌龟的界面,
rosrun turtlesim turtlesim_node完成这一步,如果没有什么问题的话,就会看到小乌龟的界面,
第三步,打开控制程序,
rosrun turtlesim turtle_teleop_key有了这三个程序,我们就可以让小乌龟动起来了。如果小乌龟没有问题,那代表ROS真的安装好了。