ZED相机快速使用指南
1、安装SDK
ZED SDK 3.8 - Download | Stereolabs
2、安装ros
GitHub - stereolabs/zed-ros-wrapper: ROS wrapper for the ZED SDK
其他教程:ZED2相机SDK安装使用及ROS下使用_可即的博客-CSDN博客
3、官方文档
Get Started with ZED | Stereolabs
4、标定参数文件说明
在/usr/local/zed/tools/下的./ZED_Calibration根据教程可以实现标定校准
在/usr/local/zed/setting下有校准后的参数
cat一下发现里面有很多内参:
2K:2K大小图像(2048*1024)
HD:1080p大小图片
FHD:720P
VGA:672*376大小
其实就是对应内参的缩放计算
官方解释:
https://support.stereolabs.com/hc/en-us/articles/360007497173-What-is-the-calibration-file-
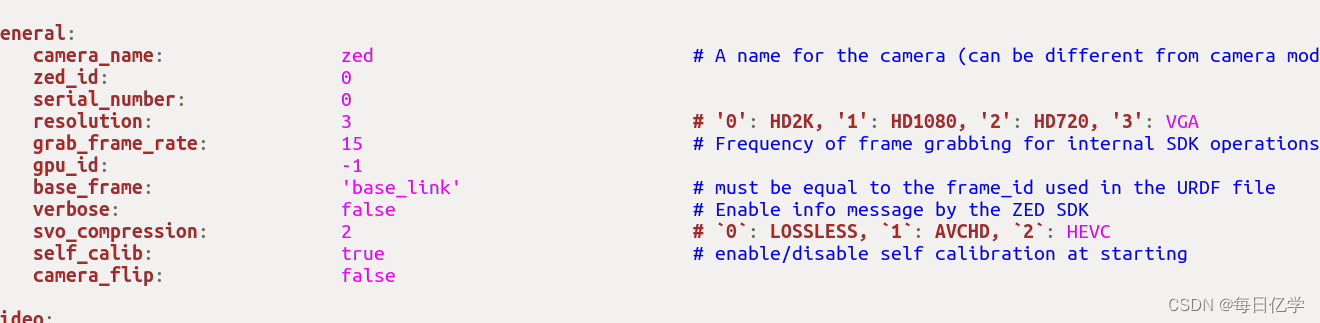
5、ros启动相机修改相机模式
我的路径:~/ZED_ws/src/zed-ros-wrapper/zed_wrapper/params 下有common.yaml可以修改相机模式。
6、发布话题含义
左摄像头
rgb/image_rect_color:颜色校正后的图像(默认左RGB图像)rgb/image_rect_gray:灰度校正图像(默认左RGB图像)rgb_raw/image_raw_color:彩色未校正图像(默认左RGB图像)rgb_raw/image_raw_gray:灰度未校正图像(默认左RGB图像)rgb/camera_info:彩色相机校准数据rgb_raw/camera_info:彩色未校正相机校准数据left/image_rect_color:左相机彩色校正图像left/image_rect_gray: 左相机灰度校正图像left_raw/image_raw_color: 左相机颜色未校正图像left_raw/image_raw_gray: 左相机灰度未校正图像left/camera_info:左相机校准数据left_raw/camera_info: 留下未校正的相机校准数据右摄像头
right/image_rect_color: 颜色校正右图像right_raw/image_raw_color: 彩色未校正右图right/image_rect_gray:灰度校正右图像right_raw/image_raw_gray: 灰度未校正右图right/camera_info:右相机标定数据right_raw/camera_info: 右未校正相机标定数据立体声对
stereo/image_rect_color:并排立体校正对图像stereo_raw/image_raw_color:并排的立体未校正对图像
官方解释:
ROS - ZED Node | Stereolabs