当前位置: 首页 > news >正文 自动驾驶——估计预瞄轨迹YawRate news 2025/8/13 13:04:18 1.Introduction 在ADAS控制系统中,通常根据预瞄距离x去估计横向距离y,有如下关系: y = a0 + a1 x + a2 * x^2 + a3 * x^3 ,那么现在有个需求,希望根据上述x和y的关系,去估计规划预瞄轨迹yawRate 2.How to estimate? 3.Reated Works 估计自车轨迹曲率的方法自动驾驶——平均道路曲率计算 查看全文 http://www.lryc.cn/news/160304.html 相关文章: PMP证书考下来要多少费用? C动态分配 C语言——程序环境和预处理(再也不用担心会忘记预处理的知识) Docker部署EMQX Spring Cloud(Finchley版本)系列教程(二) 客户端负载均衡Ribbon 好玩的js特效 java实现带有html格式和附件的符合RFC822规范的eml格式的信件原文组装 如何使用PyTorch训练LLM uniapp 手机 真机测试 云打包 要是没申请 可以使用云打包 然后采用 测试权限即可 RTSP流媒体服务器EasyNVR视频平台以服务方式启动异常却无报错,该如何解决? 【List篇】使用Arrays.asList生成的List集合,操作add方法报错 c++的类模板里,可以直接为静态变量赋值么? 【录用案例】CCF-C类,1/2区SCIEI,3个月14天录用,30天见刊,11天检索 qt day 3 SpotBugs检查java代码:在整数上进行没有起任何实际作用的位操作(INT_VACUOUS_BIT_OPERATION) javaWeb录入数据异常,mysql显示错误 Vue + Element UI 前端篇(十):动态加载菜单 图的应用(最小生成树,最短路径,有向无环图) python正则表达式笔记2 matplotlib 的默认字体和默认字体系列 STMCUBEMX_IIC_DMA_AT24C64读取和写入 wsl2相关问题 使用idea时,光标变成了不能按空格键,只能修改的vim格式,怎么切换回正常光标 vue+antd——实现table表格的打印——分页换行,每页都有表头——基础积累 linux C MD5计算 vue3学习源码笔记(小白入门系列)------ 组件更新流程 数学建模B多波束测线问题B Pytest 框架执行用例流程浅谈 C#__资源访问冲突和死锁问题 机器学习——Logistic Regression
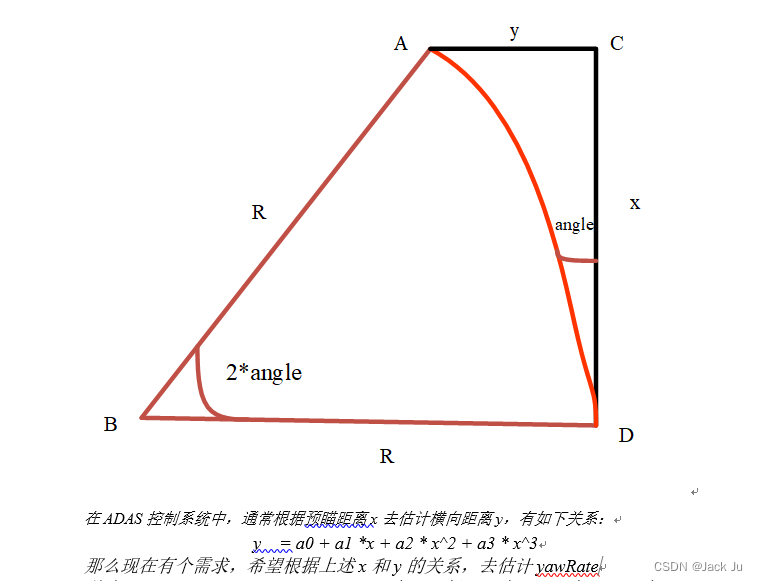
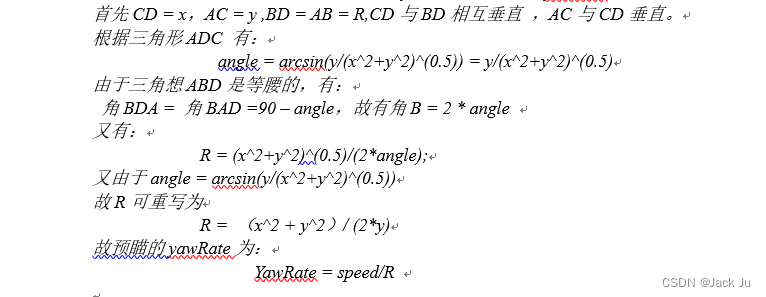
1.Introduction 在ADAS控制系统中,通常根据预瞄距离x去估计横向距离y,有如下关系: y = a0 + a1 x + a2 * x^2 + a3 * x^3 ,那么现在有个需求,希望根据上述x和y的关系,去估计规划预瞄轨迹yawRate 2.How to estimate? 3.Reated Works 估计自车轨迹曲率的方法自动驾驶——平均道路曲率计算 查看全文 http://www.lryc.cn/news/160304.html 相关文章: PMP证书考下来要多少费用? C动态分配 C语言——程序环境和预处理(再也不用担心会忘记预处理的知识) Docker部署EMQX Spring Cloud(Finchley版本)系列教程(二) 客户端负载均衡Ribbon 好玩的js特效 java实现带有html格式和附件的符合RFC822规范的eml格式的信件原文组装 如何使用PyTorch训练LLM uniapp 手机 真机测试 云打包 要是没申请 可以使用云打包 然后采用 测试权限即可 RTSP流媒体服务器EasyNVR视频平台以服务方式启动异常却无报错,该如何解决? 【List篇】使用Arrays.asList生成的List集合,操作add方法报错 c++的类模板里,可以直接为静态变量赋值么? 【录用案例】CCF-C类,1/2区SCIEI,3个月14天录用,30天见刊,11天检索 qt day 3 SpotBugs检查java代码:在整数上进行没有起任何实际作用的位操作(INT_VACUOUS_BIT_OPERATION) javaWeb录入数据异常,mysql显示错误 Vue + Element UI 前端篇(十):动态加载菜单 图的应用(最小生成树,最短路径,有向无环图) python正则表达式笔记2 matplotlib 的默认字体和默认字体系列 STMCUBEMX_IIC_DMA_AT24C64读取和写入 wsl2相关问题 使用idea时,光标变成了不能按空格键,只能修改的vim格式,怎么切换回正常光标 vue+antd——实现table表格的打印——分页换行,每页都有表头——基础积累 linux C MD5计算 vue3学习源码笔记(小白入门系列)------ 组件更新流程 数学建模B多波束测线问题B Pytest 框架执行用例流程浅谈 C#__资源访问冲突和死锁问题 机器学习——Logistic Regression