FPGA原理与结构——FIFO IP核的使用与测试
一、前言
本文介绍FIFO Generator v13.2 IP核的具体使用与例化,在学习一个IP核的使用之前,首先需要对于IP核的具体参数和原理有一个基本的了解,具体可以参考:
FPGA原理与结构——FIFO IP核原理学习![]() https://blog.csdn.net/apple_53311083/article/details/132378996?spm=1001.2014.3001.5501
https://blog.csdn.net/apple_53311083/article/details/132378996?spm=1001.2014.3001.5501
二、FIFO IP核定制
1、FIFO IP核
step1 打开vivado工程,点击左侧栏中的IP Catalog
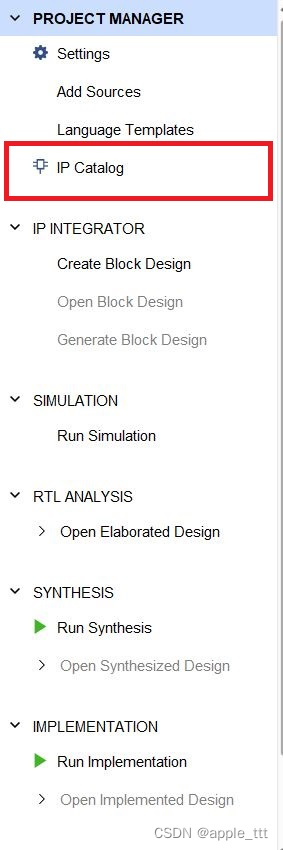
step2 在搜索栏搜索FIFO,找到FIFO Generator核

2、IP核定制
step3 Basic 界面定制
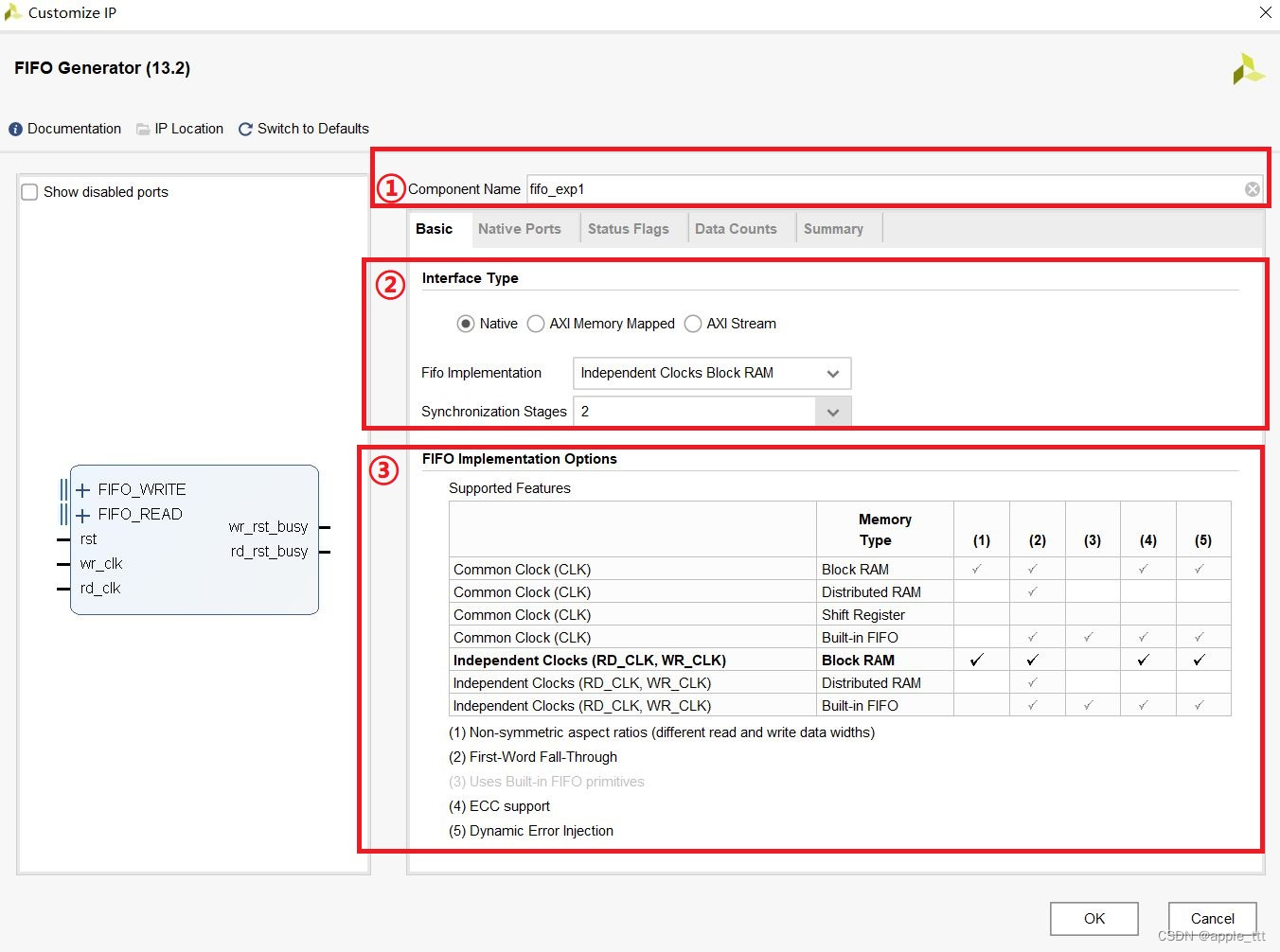
①Component Name :自定义FIFO的名称
②Interface Type :接口类型,我们知道FIFO可以支持Native接口和AXI接口,其中AXI接口包括AXI3,AXI4,AXI Stream类型,这里我们选择Native。
Fifo Implementation :用于选择我们想要实现的是同步 FIFO 还是异步 FIFO 以及使用哪
种资源实现 FIFO,这里我们选择“Independent Clocks Block RAM”,即使用块 RAM 来实现的异步 FIFO。
Synchronization Stages :同步级数,这里保持默认为2,如果有更高的频率要求,可以提升。
③FIFO Implementation Options :不同资源类型实现FIFO所能支持的功能列表,大家根据表格自行观察连接即可。
step4 Native Ports 界面设计
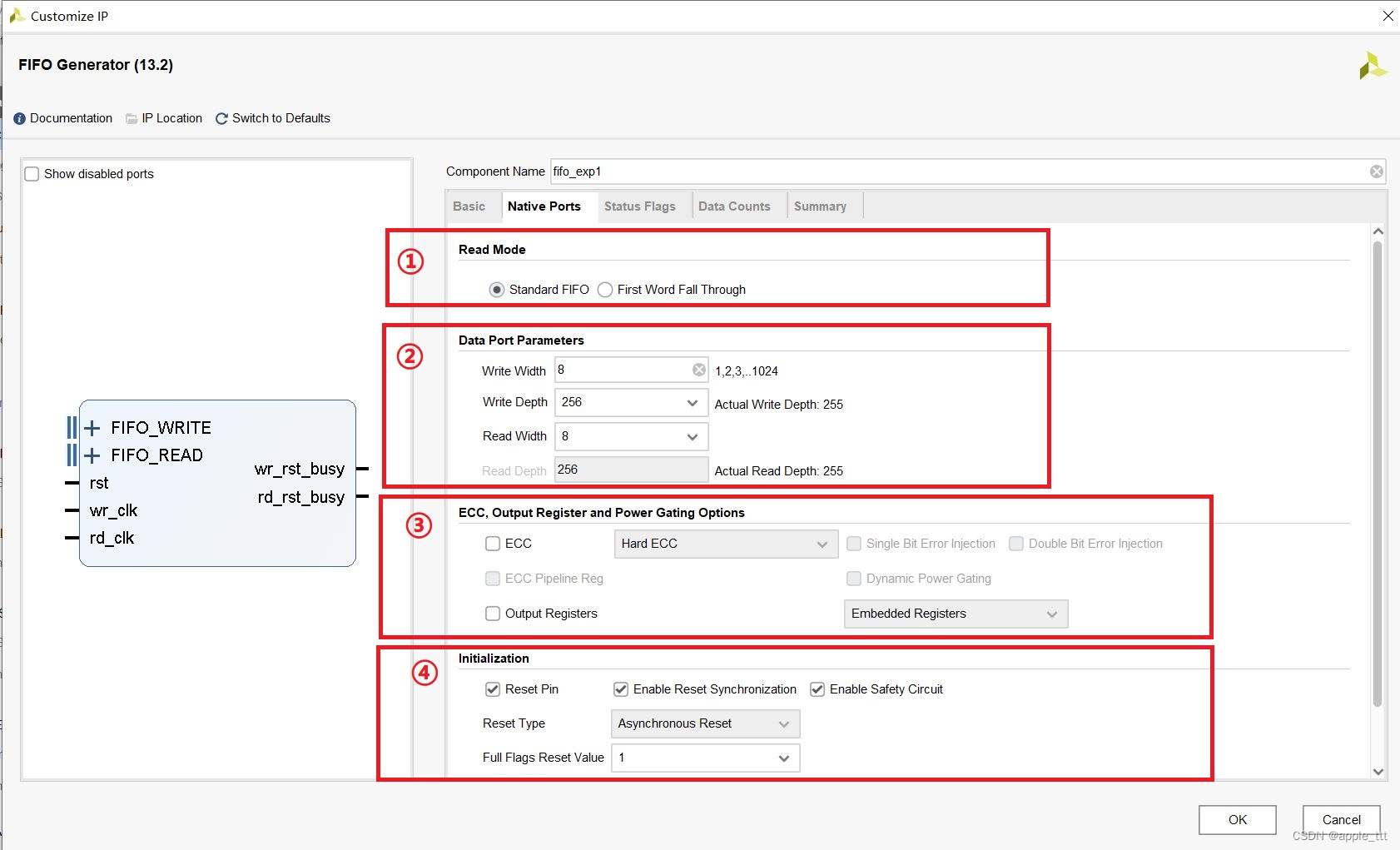
①Read Mode :用于设置读 FIFO 时的读模式,可选的有标准模式和前显模式,一般没有特殊需求的前提下,我们推荐标准模式。这里我们选择默认的“Standard FIFO”。
②Data Port Parameters :用于设置读写端口的数据总线的宽度以及 FIFO 的深度,写宽度“Write Width”我们设置为 8 位,写深度“Write Depth”我们设置为 256,注意此时 FIFO IP 核所能实现的实际深度却是 255;虽然读宽度“Read Width”能够设置成和 写宽度不一样的位宽,且此时读深度“Read Depth”会根据上面三个参数被动地自动设置成相应的值;但是我们还是将读宽度“Read Width”设置成和写宽度“Write Width”一样的位宽,这也是在实际应用中最常用的情况。
③ ECC模式:在本次的FIFO测试中不使用
④ Initiazation :用于设置FIFO的复位等相关内容,默认同步复位,安全复位,full在复位时保持高电平有效。
step5 Status Flags 界面定制
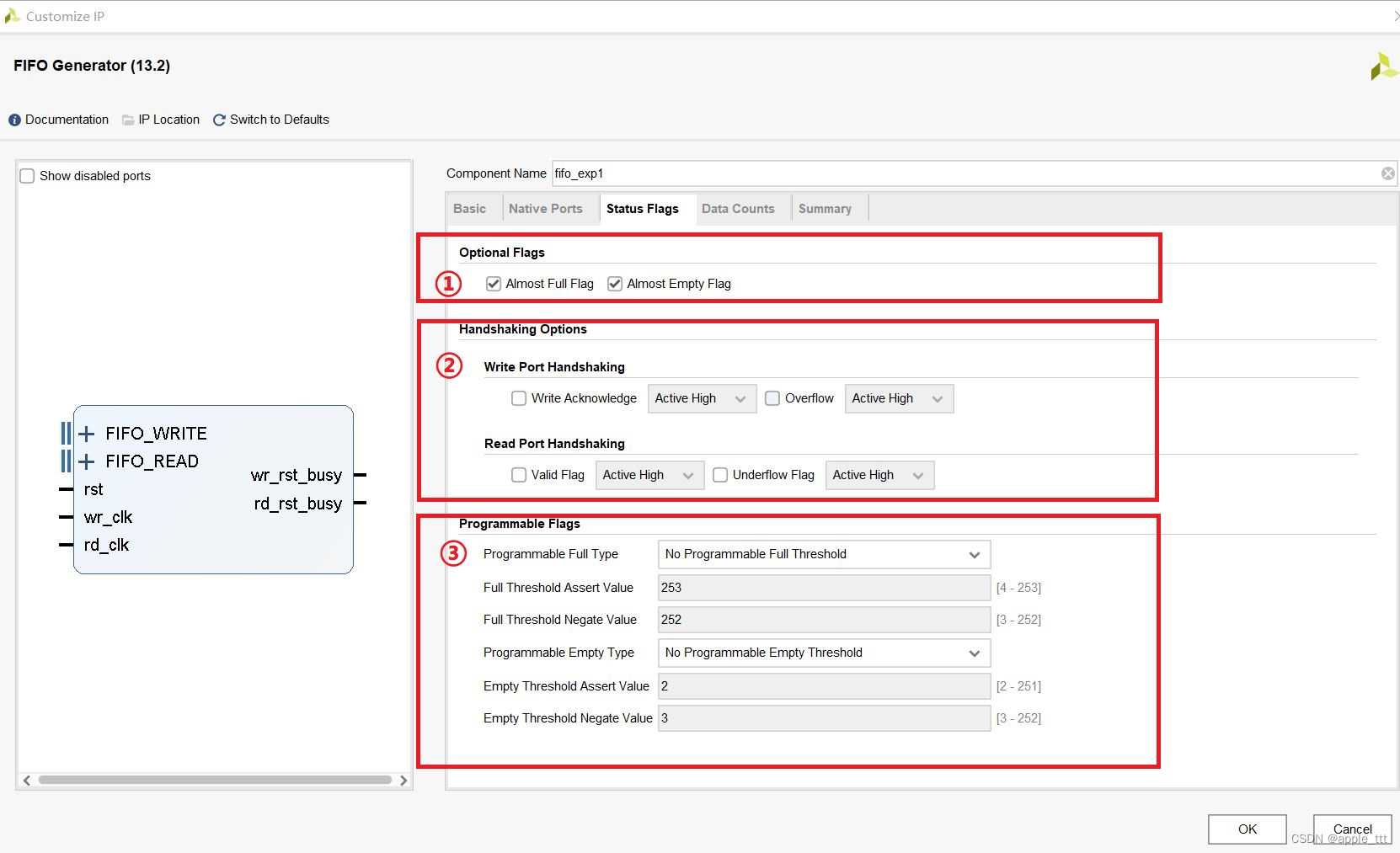
“Status Flags”界面,这个界面用于设置用户自定义接口或者用于设定专用的输入口。
① Optional Flags : 可选信号,在这里可以勾选将空和将满信号,这里我们都勾上。
② Handshaking Options :握手信号,这里我们使用不到,就不勾选了。
③ Programmable Flags : 可编程阈值,这里我们也不做选择。
step6 Data Counts
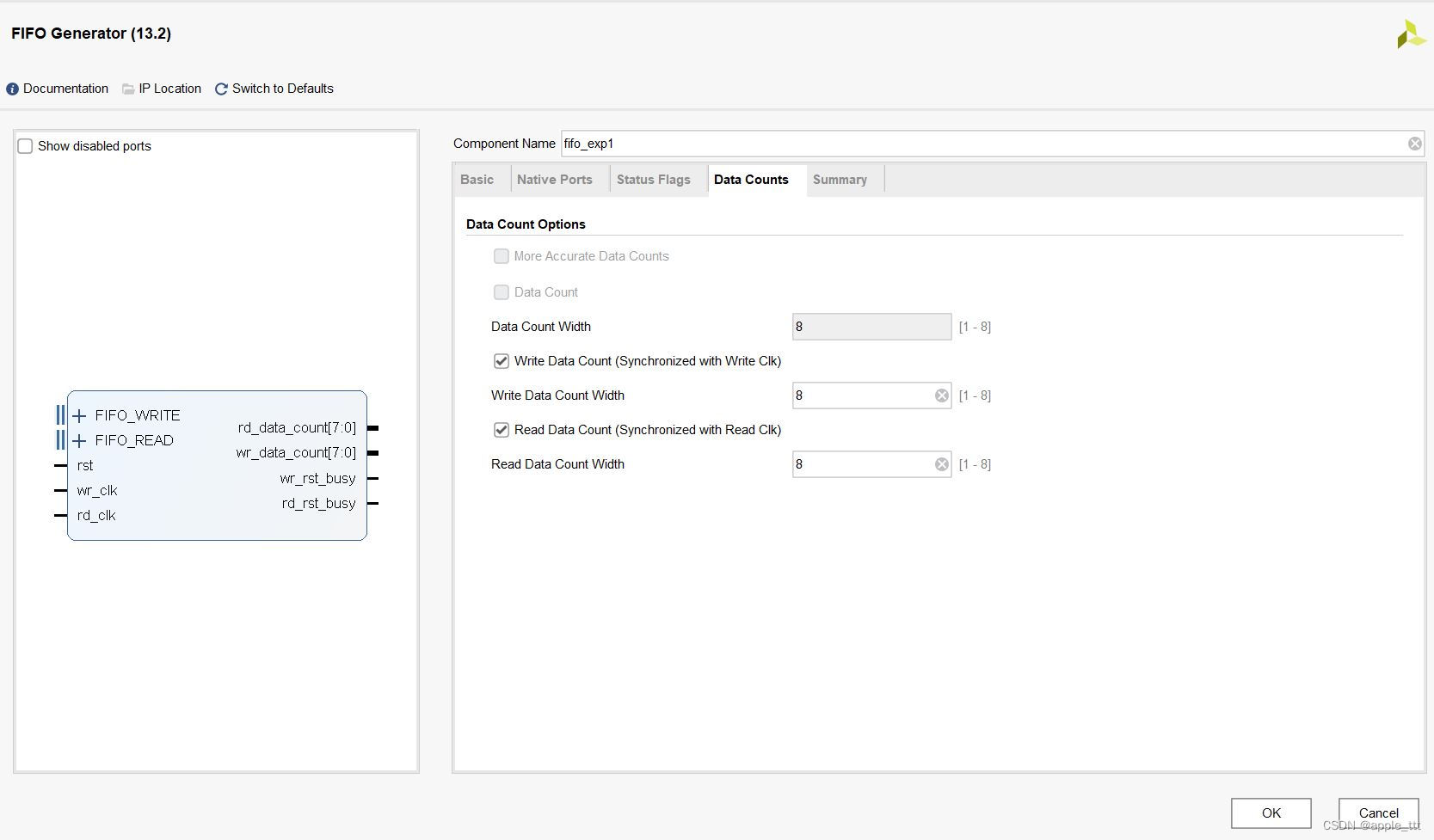
Data Counts界面用于设置 FIFO 内数据计数的输出信号,此信号表示当前在 FIFO 内存在多少个有效数据。为了更加方便地观察读/写过程,这里我们把读/写端口的数据计数都打开,且计数值总线的位宽设置为满位宽,即 8 位。
step7 Summary 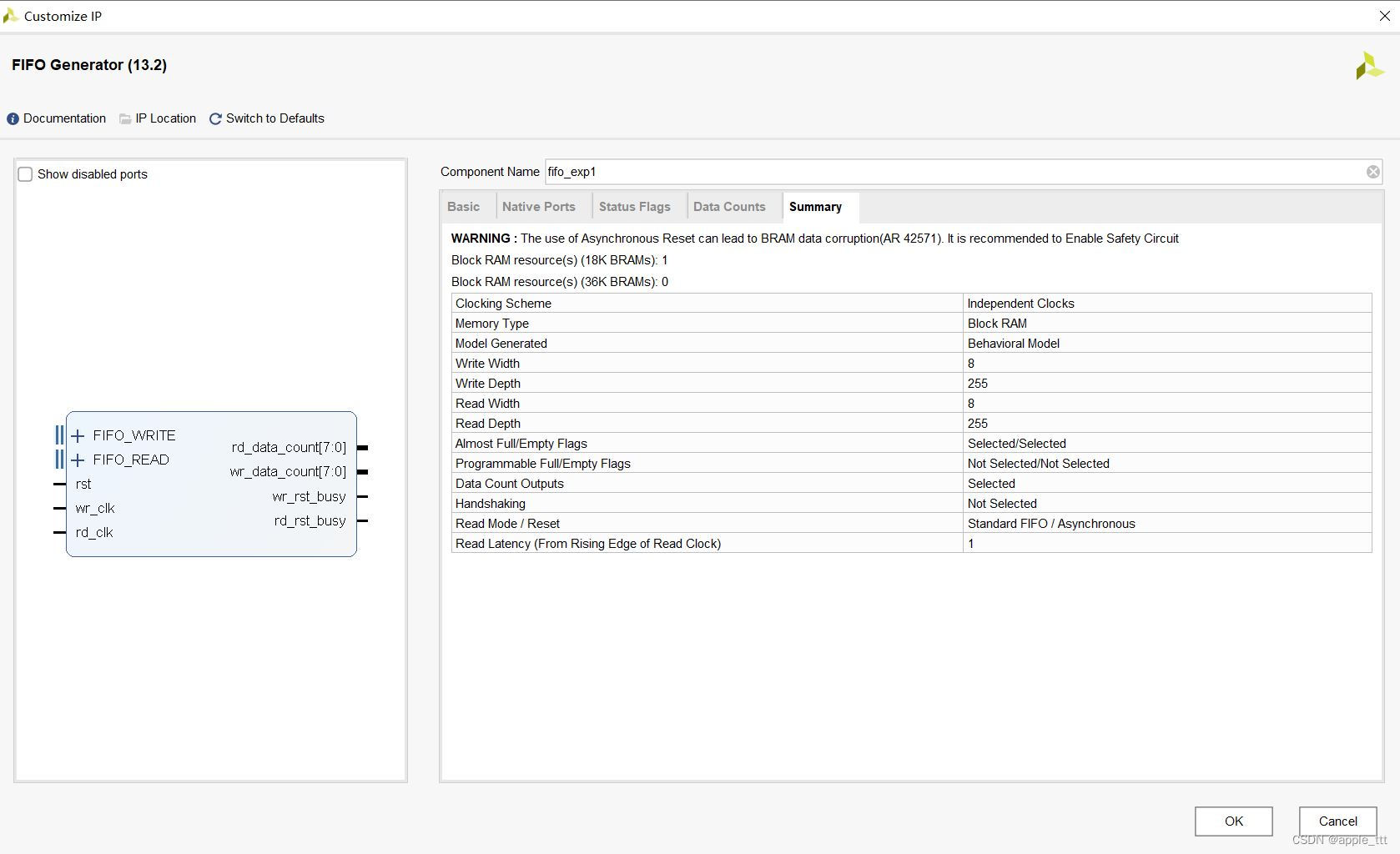
IP核定制的最后一面永远是Summary界面,帮助我们进行一个回顾和检查。
三、IP核测试
首先设计了写FIFO模块和读FIFO模块:
3.1 写fifo模块
//-------------------------------------<写fifo模块>--------------------------------
module fifo_wr(
//-------------------<信号输入>-----------------------input clk, //系统时钟input rst, //复位信号input almost_empty, //FIFO将空信号input almost_full , //FIFO将满信号//-------------------<信号输出>----------------------- output reg fifo_wr_en, //FIFO写使能output reg [7:0] fifo_wr_data //写入FIFO的数据
);//reg define
reg [1:0] state ; //动作状态
reg almost_empty_d0 ; //almost_empty 延迟一拍
reg almost_empty_syn ; //almost_empty 延迟两拍
reg [3:0] dly_cnt ; //延迟计数器//因为 almost_empty 信号是属于FIFO读时钟域的
//所以要将其同步到写时钟域中
always@( posedge clk ) beginif( rst ) beginalmost_empty_d0 <= 1'b0 ;almost_empty_syn <= 1'b0 ;endelse beginalmost_empty_d0 <= almost_empty ;almost_empty_syn <= almost_empty_d0 ;end
end//向FIFO中写入数据
always @(posedge clk ) beginif(rst) beginfifo_wr_en <= 1'b0;fifo_wr_data <= 8'd0;state <= 2'd0;dly_cnt <= 4'd0;endelse begincase(state)2'd0: begin if(almost_empty_syn) begin //如果检测到FIFO将被读空state <= 2'd1; //就进入延时状态end elsestate <= state;end 2'd1: beginif(dly_cnt == 4'd10) begin //延时10拍//原因是FIFO IP核内部状态信号的更新存在延时//延迟10拍以等待状态信号更新完毕 dly_cnt <= 4'd0;state <= 2'd2; //开始写操作fifo_wr_en <= 1'b1; //打开写使能endelsedly_cnt <= dly_cnt + 4'd1;end 2'd2: beginif(almost_full) begin //等待FIFO将被写满fifo_wr_en <= 1'b0; //关闭写使能fifo_wr_data <= 8'd0;state <= 2'd0; //回到第一个状态endelse begin //如果FIFO没有被写满fifo_wr_en <= 1'b1; //则持续打开写使能fifo_wr_data <= fifo_wr_data + 1'd1; //且写数据值持续累加endend default : state <= 2'd0;endcaseend
endendmodule3.2 读FIFO模块
//-------------------------------------<读fifo模块>--------------------------------
module fifo_rd(
//-------------------<信号输入>-----------------------input clk , // 时钟信号input rst , // 复位信号input [7:0] fifo_dout , // 从FIFO读出的数据input almost_full ,// FIFO将满信号input almost_empty,// FIFO将空信号//-------------------<信号输出>----------------------- output reg fifo_rd_en // FIFO读使能
);//reg define
reg [1:0] state ; // 动作状态
reg almost_full_d0 ; // fifo_full 延迟一拍
reg almost_full_syn ; // fifo_full 延迟两拍
reg [3:0] dly_cnt ; // 延迟计数器//因为 fifo_full 信号是属于FIFO写时钟域的
//所以要将其同步到读时钟域中
always@( posedge clk ) beginif( rst ) beginalmost_full_d0 <= 1'b0 ;almost_full_syn <= 1'b0 ;endelse beginalmost_full_d0 <= almost_full ;almost_full_syn <= almost_full_d0 ;end
end//读出FIFO的数据
always @(posedge clk ) beginif(rst) beginfifo_rd_en <= 1'b0;state <= 2'd0;dly_cnt <= 4'd0;endelse begincase(state)2'd0: beginif(almost_full_syn) //如果检测到FIFO将被写满state <= 2'd1; //就进入延时状态elsestate <= state;end 2'd1: beginif(dly_cnt == 4'd10) begin //延时10拍//原因是FIFO IP核内部状态信号的更新存在延时//延迟10拍以等待状态信号更新完毕dly_cnt <= 4'd0;state <= 2'd2; //开始读操作endelsedly_cnt <= dly_cnt + 4'd1;end2'd2: beginif(almost_empty) begin //等待FIFO将被读空fifo_rd_en <= 1'b0; //关闭读使能state <= 2'd0; //回到第一个状态endelse //如果FIFO没有被读空fifo_rd_en <= 1'b1; //则持续打开读使能end default : state <= 2'd0;endcaseend
endendmodule3.3 顶层模块
module fifo_top(
//-------------------<信号输入>-----------------------input sys_clk, //系统时钟input rst //复位信号
);wire [7:0] din; //fifo的输入数据(写入的数据)wire wr_en; //写使能wire rd_en; //读使能wire [7:0] dout; //fifo的输出数据(读出的数据)wire full; //fifo满信号wire almost_full; //fifo将满标志wire empty; //fifo空标志wire almost_empty; //fifo将空标志wire [7:0]rd_data_count; //fifo写时钟域的数据计数wire [7:0]wr_data_count; //fifo读时钟域的数据计数wire wr_rst_busy;wire rd_data_count; //-------------------<IP核例化>-----------------------
fifo_exp1 fifo1 (.rst (rst), // input wire rst.wr_clk (sys_clk), // input wire wr_clk.rd_clk (sys_clk), // input wire rd_clk.din (din), // input wire [7 : 0] din.wr_en (wr_en), // input wire wr_en.rd_en (rd_en), // input wire rd_en.dout (dout), // output wire [7 : 0] dout.full (full), // output wire full.almost_full (almost_full), // output wire almost_full.empty (empty), // output wire empty.almost_empty (almost_empty), // output wire almost_empty.rd_data_count (rd_data_count), // output wire [7 : 0] rd_data_count.wr_data_count (wr_data_count), // output wire [7 : 0] wr_data_count.wr_rst_busy (wr_rst_busy), // output wire wr_rst_busy.rd_rst_busy (rd_rst_busy) // output wire rd_rst_busy
);//例化写FIFO模块
fifo_wr fifo_wr_u1(.clk ( sys_clk ), // 写时钟.rst ( rst ), // 复位信号.fifo_wr_en ( wr_en ) , // fifo写请求.fifo_wr_data ( din ) , // 写入FIFO的数据.almost_empty ( almost_empty ), // fifo空信号.almost_full ( almost_full ) // fifo满信号
);//例化读FIFO模块
fifo_rd fifo_rd_u1(.clk ( sys_clk ), // 读时钟.rst ( rst ), // 复位信号.fifo_rd_en ( rd_en ), // fifo读请求.fifo_dout ( dout ), // 从FIFO输出的数据.almost_empty ( almost_empty ), // fifo空信号.almost_full ( almost_full ) // fifo满信号
);endmodule
3.4 测试模块
`timescale 1ns / 1psmodule tb_ip_fifo( );// Inputsreg sys_clk;reg rst;// Instantiate the Unit Under Test (UUT)fifo_top tb1_fifo_top (.sys_clk (sys_clk), .rst (rst));//Genarate the clkparameter PERIOD = 20;always beginsys_clk = 1'b0;#(PERIOD/2) sys_clk = 1'b1;#(PERIOD/2);end initial begin// Initialize Inputsrst = 1;// Wait 100 ns for global reset to finish#100 ;rst = 0;// Add stimulus hereendendmodule3.4 测试结果

通过看到FIFO如我们预期的写入和读出数据,读出的数据满足先入先出的原则。
四、总结
本文总结了FIFO IP核的使用方法,给出了各个配置参数的具体含义及配置方式,并对相关的设计进行了测试。