多传感器融合定位十四-基于图优化的定位方法
多传感器融合定位十四-基于图优化的定位方法
- 1. 基于图优化的定位简介
- 1.1 核心思路
- 1.2 定位流程
- 2. 边缘化原理及应用
- 2.1 边缘化原理
- 2.2 从滤波角度理解边缘化
- 3. 基于kitti的实现原理
- 3.1 基于地图定位的滑动窗口模型
- 3.2 边缘化过程
- 4. lio-mapping 介绍
- 4.1 核心思想
- 4.2 具体流程
- 4.2.1 各类因子
- 4.2.2 滑窗模型
- 4.2.3 边缘化
- 4.2.4 添加新帧
Reference:
- 深蓝学院-多传感器融合
- 多传感器融合定位理论基础
文章跳转:
- 多传感器融合定位一-3D激光里程计其一:ICP
- 多传感器融合定位二-3D激光里程计其二:NDT
- 多传感器融合定位三-3D激光里程计其三:点云畸变补偿
- 多传感器融合定位四-3D激光里程计其四:点云线面特征提取
- 多传感器融合定位五-点云地图构建及定位
- 多传感器融合定位六-惯性导航原理及误差分析
- 多传感器融合定位七-惯性导航解算及误差分析其一
- 多传感器融合定位八-惯性导航解算及误差分析其二
- 多传感器融合定位九-基于滤波的融合方法Ⅰ其一
- 多传感器融合定位十-基于滤波的融合方法Ⅰ其二
- 多传感器融合定位十一-基于滤波的融合方法Ⅱ
- 多传感器融合定位十二-基于图优化的建图方法其一
- 多传感器融合定位十三-基于图优化的建图方法其二
- 多传感器融合定位十四-基于图优化的定位方法
- 多传感器融合定位十五-多传感器时空标定(综述)
1. 基于图优化的定位简介
1.1 核心思路
核心思路是把融合方法从滤波换成图优化,其元素不再是简单的惯性解算,而是预积分。
一个暴力的模型可以设计为:
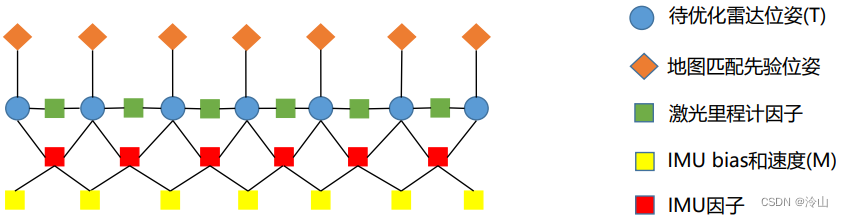
缺陷:随着时间的进行,图模型会越来越大,导致无法达到实时性。
解决方法:不断删除旧的帧,只优化最新的几帧,即维持一个滑动窗口。
模型如下:
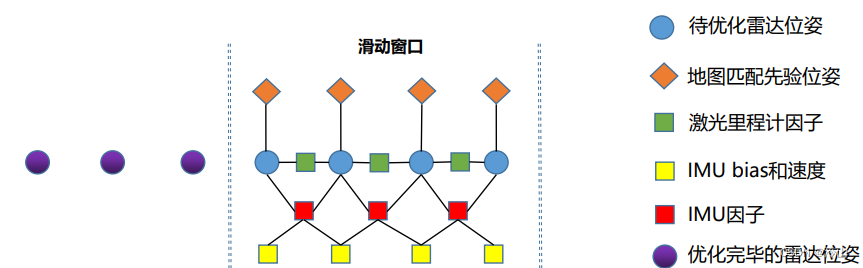
问题:直接从模型中删除,等于损失了信息。
解法:通过模型把旧帧的约束传递下来,即边缘化(后面讲具体细节)。
1.2 定位流程

整个流程:不断往滑窗里添加新信息,并边缘化旧信息。
需要注意的是:
- 正常行驶时,不必像建图那样,提取稀疏的关键帧;
- 停车时,需要按一定策略提取关键帧,但删除的是次新帧,因此不需要边缘化。
2. 边缘化原理及应用
2.1 边缘化原理
优化问题具有如下通用形式:
HX=bH X=b HX=b并可拆解成如下形式:
[HmmHmrHrmHrr][XmXr]=[bmbr]\left[\begin{array}{cc} H_{m m} & H_{m r} \\ H_{r m} & H_{r r} \end{array}\right]\left[\begin{array}{c} X_m \\ X_r \end{array}\right]=\left[\begin{array}{l} b_m \\ b_r \end{array}\right] [HmmHrmHmrHrr][XmXr]=[bmbr]拆解的目的是通过一系列操作,把 XmX_mXm 从状态量 里删除掉,并把它的约束保留下来。
在滑窗模式里,这个 XmX_mXm 即为要边缘化掉的量。
回顾舒尔补:
给定矩阵
M=[ABCD]M=\left[\begin{array}{ll} \mathrm{A} & \mathrm{B} \\ \mathrm{C} & \mathrm{D} \end{array}\right] M=[ACBD]它可以通过如下变换,变成上三角矩阵,即
[I0−CA−1I][ABCD]=[AB0ΔA]\left[\begin{array}{cc} \mathrm{I} & 0 \\ -\mathrm{CA}^{-1} & \mathrm{I} \end{array}\right]\left[\begin{array}{cc} \mathrm{A} & \mathrm{B} \\ \mathrm{C} & \mathrm{D} \end{array}\right]=\left[\begin{array}{cc} \mathrm{A} & \mathrm{B} \\ 0 & \Delta \mathrm{A} \end{array}\right] [I−CA−10I][ACBD]=[A0BΔA]其中, ΔA=D−CA−1B\Delta \mathrm{A}=\mathrm{D}-\mathrm{CA}^{-1} \mathrm{~B}ΔA=D−CA−1 B 称为 A\mathrm{A}A 关于 M\mathrm{M}M 的舒尔补。
拆解后的优化问题,可通过舒尔补对矩阵三角化, 即
[I0−HrmHmm−1I][HmmHmrHrmHrr][XmXr]=[I0−HrmHmm−1I][bmbr]\begin{aligned} & {\left[\begin{array}{cc} I & 0 \\ -H_{r m} H_{m m}^{-1} & I \end{array}\right]\left[\begin{array}{cc} H_{m m} & H_{m r} \\ H_{r m} & H_{r r} \end{array}\right]\left[\begin{array}{c} X_m \\ X_r \end{array}\right] } \\ = & {\left[\begin{array}{cc} I & 0 \\ -H_{r m} H_{m m}^{-1} & I \end{array}\right]\left[\begin{array}{l} b_m \\ b_r \end{array}\right] } \end{aligned} =[I−HrmHmm−10I][HmmHrmHmrHrr][XmXr][I−HrmHmm−10I][bmbr]
进一步化简得,
[HmmHmr0Hrr−HrmHmm−1Hmr][XmXr]=[bmbr−HrmHmm−1bm]\begin{aligned} & {\left[\begin{array}{cc} H_{m m} & H_{m r} \\ 0 & H_{r r}-H_{r m} H_{m m}^{-1} H_{m r} \end{array}\right]\left[\begin{array}{c} X_m \\ X_r \end{array}\right] } \\ = & {\left[\begin{array}{c} b_m \\ b_r-H_{r m} H_{m m}^{-1} b_m \end{array}\right] } \end{aligned} =[Hmm0HmrHrr−HrmHmm−1Hmr][XmXr][bmbr−HrmHmm−1bm]此时,可以利用等式第2行直接得到:
(Hrr−HrmHmm−1Hmr)Xr=br−HrmHmm−1bm\left(H_{r r}-H_{r m} H_{m m}^{-1} H_{m r}\right) X_r=b_r-H_{r m} H_{m m}^{-1} b_m (Hrr−HrmHmm−1Hmr)Xr=br−HrmHmm−1bm
其含义为:此时可以不依赖 XmX_mXm 求解出 XrX_rXr,若我们只关心 XrX_rXr 的值,则可以把 XmX_mXm 从模型里删除。
2.2 从滤波角度理解边缘化
kalman滤波是此前已经熟悉的,从边缘化的 角度重新看一遍滤波器的推导,更有利于深入 理解。
运动模型与观测模型分别为:
xk=Ak−1xk−1+vk+wkyk=Ckxk+nk\begin{aligned} & \mathbf{x}_k=\mathbf{A}_{k-1} \mathbf{x}_{k-1}+\mathbf{v}_k+\mathbf{w}_k \\ & \mathbf{y}_k=\mathbf{C}_k \mathbf{x}_k+\mathbf{n}_k \end{aligned} xk=Ak−1xk−1+vk+wkyk=Ckxk+nk
其中 k=1…Kk=1 \ldots Kk=1…K状态量的求解,可以等效为如下模型
x^=argminxJ(x)\hat{\mathbf{x}}=\arg \min _{\mathbf{x}} J(\mathbf{x}) x^=argxminJ(x)
其中
J(x)=∑k=0K(Jv,k(x)+Jy,k(x))Jv,k(x)={12(x0−xˇ0)TPˇ0−1(x0−xˇ0),k=012(xk−Ak−1xk−1−vk)T×Qk−1(xk−Ak−1xk−1−vk),k=1…KJy,k(x)=12(yk−Ckxk)TRk−1(yk−Ckxk),k=0…K\begin{aligned} & J(\mathbf{x})=\sum_{k=0}^K\left(J_{v, k}(\mathbf{x})+J_{y, k}(\mathbf{x})\right) \\ & J_{v, k}(\mathbf{x})=\left\{\begin{array}{c} \frac{1}{2}\left(\mathbf{x}_0-\check{\mathbf{x}}_0\right)^T \check{\mathbf{P}}_0^{-1}\left(\mathbf{x}_0-\check{\mathbf{x}}_0\right), k=0 \\ \frac{1}{2}\left(\mathbf{x}_k-\mathbf{A}_{k-1} \mathbf{x}_{k-1}-\mathbf{v}_k\right)^T \\ \times \mathbf{Q}_k^{-1}\left(\mathbf{x}_k-\mathbf{A}_{k-1} \mathbf{x}_{k-1}-\mathbf{v}_k\right), k=1 \ldots K \end{array}\right. \\ & J_{y, k}(\mathbf{x})=\frac{1}{2}\left(\mathbf{y}_k-\mathbf{C}_k \mathbf{x}_k\right)^T \mathbf{R}_k^{-1}\left(\mathbf{y}_k-\mathbf{C}_k \mathbf{x}_k\right), \quad k=0 \ldots K \end{aligned} J(x)=k=0∑K(Jv,k(x)+Jy,k(x))Jv,k(x)=⎩⎨⎧21(x0−xˇ0)TPˇ0−1(x0−xˇ0),k=021(xk−Ak−1xk−1−vk)T×Qk−1(xk−Ak−1xk−1−vk),k=1…KJy,k(x)=21(yk−Ckxk)TRk−1(yk−Ckxk),k=0…K将上述模型整理为更简洁的形式,令
z=[xˇ0v1⋮vKy0y1⋮yK],x=[x0⋮xK]\mathbf{z}=\left[\begin{array}{c} \check{\mathbf{x}}_0 \\ \mathbf{v}_1 \\ \vdots \\ \mathbf{v}_K \\ \hline \mathbf{y}_0 \\ \mathbf{y}_1 \\ \vdots \\ \mathbf{y}_K \end{array}\right], \quad \mathbf{x}=\left[\begin{array}{c} \mathbf{x}_0 \\ \vdots \\ \mathbf{x}_K \end{array}\right] z=xˇ0v1⋮vKy0y1⋮yK,x=x0⋮xKH=[1−A01⋱⋱−AK−11C0C1⋱CK]W=[Pˇ0Q1⋱QKR0R1RK]\begin{aligned} & \mathbf{H}=\left[\begin{array}{cccc} \mathbf{1} & & & \\ -\mathbf{A}_0 & \mathbf{1} & & \\ & \ddots & \ddots & \\ & & -\mathbf{A}_{K-1} & \mathbf{1} \\ \hline \mathbf{C}_0 & \mathbf{C}_1 & & \\ & & \ddots & \\ & & & \mathbf{C}_K \end{array}\right] \\ & \mathbf{W}=\left[\begin{array}{llll|lll} \check{\mathbf{P}}_0 & & & & & & \\ & \mathbf{Q}_1 & & & & & \\ & & \ddots & & & \\ & & & \mathbf{Q}_K & & & \\ \hline & & & & \mathbf{R}_0 & & \\ & & & & & \mathbf{R}_1 & \\ & & & & & \mathbf{R}_K \end{array}\right] \\ & \end{aligned} H=1−A0C01⋱C1⋱−AK−1⋱1CKW=Pˇ0Q1⋱QKR0R1RK此时,目标函数可以重新表示为
J(x)=12(z−Hx)TW−1(z−Hx)J(\mathbf{x})=\frac{1}{2}(\mathbf{z}-\mathbf{H x})^T \mathbf{W}^{-1}(\mathbf{z}-\mathbf{H x}) J(x)=21(z−Hx)TW−1(z−Hx)求解其最小值,即令其一阶导为零
∂J(x)∂xT∣x^=−HTW−1(z−Hx^)=0\left.\frac{\partial J(\mathbf{x})}{\partial \mathbf{x}^T}\right|_{\hat{\mathbf{x}}}=-\mathbf{H}^T \mathbf{W}^{-1}(\mathbf{z}-\mathbf{H} \hat{\mathbf{x}})=\mathbf{0} ∂xT∂J(x)x^=−HTW−1(z−Hx^)=0即
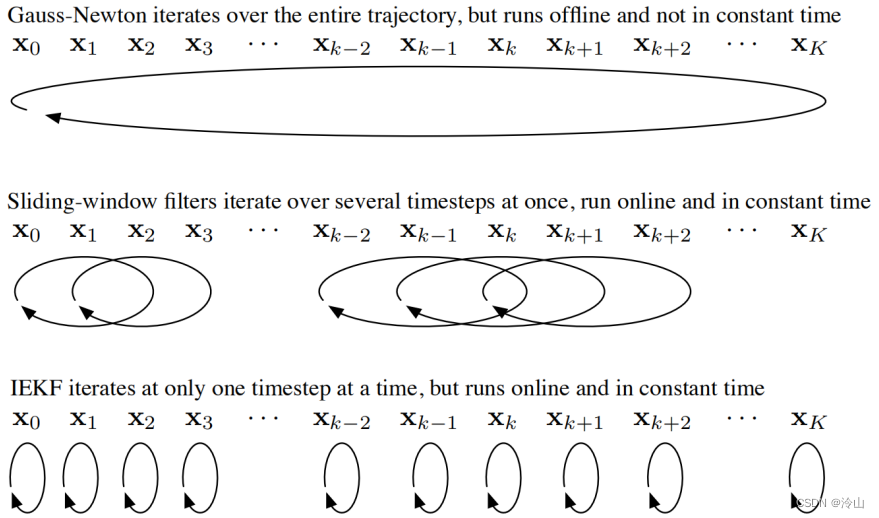
(HTW−1H)x^=HTW−1z\left(\mathbf{H}^T \mathbf{W}^{-1} \mathbf{H}\right) \hat{\mathbf{x}}=\mathbf{H}^T \mathbf{W}^{-1} \mathbf{z} (HTW−1H)x^=HTW−1z然而,这是批量求解模型,当只关心当前时 刻(k时刻)状态时,应改为滤波模型。
假设上一时刻后验为
{x^k−1,P^k−1}\left\{\hat{\mathbf{x}}_{k-1}, \hat{\mathbf{P}}_{k-1}\right\} {x^k−1,P^k−1}
目标是得到当前时刻后验
{x^k−1,P^k−1,vk,yk}↦{x^k,P^k}\left\{\hat{\mathbf{x}}_{k-1}, \hat{\mathbf{P}}_{k-1}, \mathbf{v}_k, \mathbf{y}_k\right\} \mapsto\left\{\hat{\mathbf{x}}_k, \hat{\mathbf{P}}_k\right\} {x^k−1,P^k−1,vk,yk}↦{x^k,P^k}由于马尔可夫性,仅与前一时刻有关,因此令
zk=[x^k−1vkyk]Hk=[1−Ak−11Ck]Wk=[P^k−1QkRk]\begin{aligned} \mathbf{z}_k & =\left[\begin{array}{c} \hat{\mathbf{x}}_{k-1} \\ \mathbf{v}_k \\ \mathbf{y}_k \end{array}\right] \\ \mathbf{H}_k & =\left[\begin{array}{ccc} \mathbf{1} & \\ -\mathbf{A}_{k-1} & 1 \\ & \mathbf{C}_k \end{array}\right] \\ \mathbf{W}_k & =\left[\begin{array}{ccc} \hat{\mathbf{P}}_{k-1} & \\ & \mathbf{Q}_k & \\ & & \mathbf{R}_k \end{array}\right] \end{aligned} zkHkWk=x^k−1vkyk=1−Ak−11Ck=P^k−1QkRk则模型的解为
(HkTWk−1Hk)x^=HkTWk−1zk\left(\mathbf{H}_k^T \mathbf{W}_k^{-1} \mathbf{H}_k\right) \hat{\mathbf{x}}=\mathbf{H}_k^T \mathbf{W}_k^{-1} \mathbf{z}_k (HkTWk−1Hk)x^=HkTWk−1zk
其中
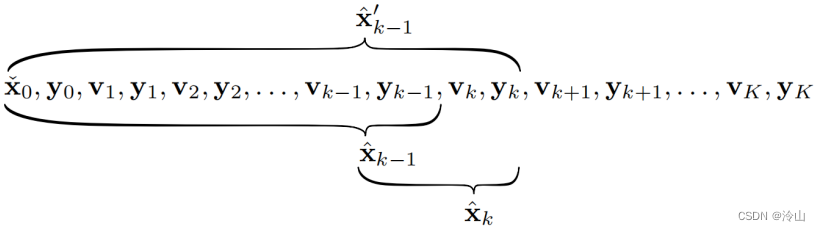
x^=[x^k−1′x^k]\hat{\mathbf{x}}=\left[\begin{array}{c} \hat{\mathbf{x}}_{k-1}^{\prime} \\ \hat{\mathbf{x}}_k \end{array}\right] x^=[x^k−1′x^k]x^k−1\hat{\mathbf{x}}_{k-1}x^k−1 和 x^k−1′\hat{\mathbf{x}}_{k-1}^{\prime}x^k−1′ 有本质区别,下图可以明确展示
在此基础上,求解模型可以展开为
[P^k−1−1+Ak−1TQk−1Ak−1−Ak−1TQk−1−Qk−1Ak−1Qk−1+CkTRk−1Ck][x^k−1′x^k]=[P^k−1−1x^k−1−Ak−1TQk−1vkQk−1vk+CkTRk−1yk]\left[\begin{array}{cc} \hat{\mathbf{P}}_{k-1}^{-1}+\mathbf{A}_{k-1}^T \mathbf{Q}_k^{-1} \mathbf{A}_{k-1} & -\mathbf{A}_{k-1}^T \mathbf{Q}_k^{-1} \\ -\mathbf{Q}_k^{-1} \mathbf{A}_{k-1} & \mathbf{Q}_k^{-1}+\mathbf{C}_k^T \mathbf{R}_k^{-1} \mathbf{C}_k \end{array}\right]\left[\begin{array}{c} \hat{\mathbf{x}}_{k-1}^{\prime} \\ \hat{\mathbf{x}}_k \end{array}\right]=\left[\begin{array}{c} \hat{\mathbf{P}}_{k-1}^{-1} \hat{\mathbf{x}}_{k-1}-\mathbf{A}_{k-1}^T \mathbf{Q}_k^{-1} \mathbf{v}_k \\ \mathbf{Q}_k^{-1} \mathbf{v}_k+\mathbf{C}_k^T \mathbf{R}_k^{-1} \mathbf{y}_k \end{array}\right] [P^k−1−1+Ak−1TQk−1Ak−1−Qk−1Ak−1−Ak−1TQk−1Qk−1+CkTRk−1Ck][x^k−1′x^k]=[P^k−1−1x^k−1−Ak−1TQk−1vkQk−1vk+CkTRk−1yk]利用舒尔补,等式两边左乘如下矩阵,便可以直接求解出 x^k\hat{\mathbf{x}}_kx^k ,且不需求解 x^k−1′\hat{\mathbf{x}}_{k-1}^{\prime}x^k−1′
[10Qk−1Ak−1(P^k−1−1+Ak−1TQk−1Ak−1)−11]\left[\begin{array}{cc} \mathbf{1} & \mathbf{0} \\ \mathbf{Q}_k^{-1} \mathbf{A}_{k-1}\left(\hat{\mathbf{P}}_{k-1}^{-1}+\mathbf{A}_{k-1}^T \mathbf{Q}_k^{-1} \mathbf{A}_{k-1}\right)^{-1} & \mathbf{1} \end{array}\right] [1Qk−1Ak−1(P^k−1−1+Ak−1TQk−1Ak−1)−101]可得:
P^k−1x^k=Pˇk−1(Ak−1x^k−1+vk)+CkTRk−1yk\hat{\mathbf{P}}_k^{-1} \hat{\mathbf{x}}_k=\check{\mathbf{P}}_k^{-1}\left(\mathbf{A}_{k-1} \hat{\mathbf{x}}_{k-1}+\mathbf{v}_k\right)+\mathbf{C}_k^T \mathbf{R}_k^{-1} \mathbf{y}_k P^k−1x^k=Pˇk−1(Ak−1x^k−1+vk)+CkTRk−1yk其中
Pˇk=Qk+Ak−1P^k−1Ak−1TP^k=(Pˇk−1+CkTRk−1Ck)−1\begin{aligned} & \check{\mathbf{P}}_k=\mathbf{Q}_k+\mathbf{A}_{k-1} \hat{\mathbf{P}}_{k-1} \mathbf{A}_{k-1}^T \\ & \hat{\mathbf{P}}_k=\left(\check{\mathbf{P}}_k^{-1}+\mathbf{C}_k^T \mathbf{R}_k^{-1} \mathbf{C}_k\right)^{-1} \end{aligned} Pˇk=Qk+Ak−1P^k−1Ak−1TP^k=(Pˇk−1+CkTRk−1Ck)−1以上过程,核心即为边缘化,因此滤波(IEKF)可以看做长度为1的滑动窗口。
3. 基于kitti的实现原理
3.1 基于地图定位的滑动窗口模型
-
窗口优化模型构成
在图优化模型中,优化模型也可写成如下形式:
J⊤ΣJδx=−J⊤Σr\mathbf{J}^{\top} \boldsymbol{\Sigma} \mathbf{J} \delta \boldsymbol{x}=-\mathbf{J}^{\top} \boldsymbol{\Sigma} \mathbf{r} J⊤ΣJδx=−J⊤Σr其中
rrr 是残差;
JJJ 是残差关于状态量的雅可比;
∑\sum∑ 是信息矩阵。
在kitti工程中,基于地图定位的滑动窗口,其残差包括:- 地图匹配位姿和优化变量的残差
- 激光里程计相对位姿和优化变量的残差
- IMU预积分和优化变量的残差
- 边缘化形成的先验因子对应的残差
此处先介绍前3项,第4项待边缘化后介绍。
-
地图匹配位姿和优化变量的残差
该残差对应的因子为地图先验因子。
一个因子仅约束一个位姿,其模型如下:

残差关于优化变量的雅可比,可视化如下:

因此,对应的Hessian矩阵的可视化为:

-
激光里程计相对位姿和优化变量的残差
该残差对应的因子为激光里程计因子。
一个因子约束两个位姿,其模型如下:

残差关于优化变量的雅可比,可视化如下:

因此,对应的Hessian矩阵可视化为:

-
IMU预积分和优化变量的残差
该残差对应的因子为IMU因子。
一个因子约束两个位姿,并约束两个时刻 IMU
的速度与 bias。

残差关于优化变量的雅可比,可视化如下:

因此,对应的Hessian矩阵可视化为:

-
完整模型
完整Hessian矩阵,即为以上各因子对应矩阵的累加。

上述过程用公式可表示为:
J⊤ΣJ⏟Hδx=−J⊤Σr⏟b \underbrace{\mathbf{J}^{\top} \boldsymbol{\Sigma} \mathbf{J}}_{\mathbf{H}} \delta \boldsymbol{x}=\underbrace{-\mathbf{J}^{\top} \boldsymbol{\Sigma} \boldsymbol{r}}_{\text {b }} HJ⊤ΣJδx=b −J⊤Σr其中
r=[rY0rY1rY2rL0rL1rM0rM1]\boldsymbol{r}=\left[\begin{array}{l} \boldsymbol{r}_{Y 0} \\ \boldsymbol{r}_{Y 1} \\ \boldsymbol{r}_{Y 2} \\ \boldsymbol{r}_{L 0} \\ \boldsymbol{r}_{L 1} \\ \boldsymbol{r}_{M 0} \\ \boldsymbol{r}_{M 1} \end{array}\right] r=rY0rY1rY2rL0rL1rM0rM1
J=∂r∂δx=[∂r0∂δ0∂r1∂δx∂r2∂δx∂rL0∂δx∂rL1∂δx∂rM0∂δx∂rM1∂δx]=[J1J2J3J4J5J6J7]J⊤=[J1⊤J2⊤J3⊤J4⊤J5⊤J6⊤J7⊤]\begin{aligned} & \mathbf{J}=\frac{\partial \mathbf{r}}{\partial \delta x}=\left[\begin{array}{c} \frac{\partial \mathbf{r}_0}{\partial \delta_0} \\ \frac{\partial \mathbf{r}_1}{\partial \delta x} \\ \frac{\partial \mathbf{r}_2}{\partial \delta x} \\ \frac{\partial \mathbf{r}_{L 0}}{\partial \delta x} \\ \frac{\partial \mathbf{r}_{L 1}}{\partial \delta x} \\ \frac{\partial \mathbf{r}_{M 0}}{\partial \delta x} \\ \frac{\partial \mathbf{r}_{M 1}}{\partial \delta x} \end{array}\right]=\left[\begin{array}{l} \mathbf{J}_1 \\ \mathbf{J}_2 \\ \mathbf{J}_3 \\ \mathbf{J}_4 \\ \mathbf{J}_5 \\ \mathbf{J}_6 \\ \mathbf{J}_7 \end{array}\right] \\ & \mathbf{J}^{\top}=\left[\begin{array}{lllllll} \mathbf{J}_1^{\top} & \mathbf{J}_2^{\top} & \mathbf{J}_3^{\top} & \mathbf{J}_4^{\top} & \mathbf{J}_5^{\top} & \mathbf{J}_6^{\top} & \mathbf{J}_7^{\top} \end{array}\right] \\ & \end{aligned} J=∂δx∂r=∂δ0∂r0∂δx∂r1∂δx∂r2∂δx∂rL0∂δx∂rL1∂δx∂rM0∂δx∂rM1=J1J2J3J4J5J6J7J⊤=[J1⊤J2⊤J3⊤J4⊤J5⊤J6⊤J7⊤]矩阵乘法写成累加形式为:
∑i=17Ji⊤ΣiJiδx=−∑i=17Ji⊤Σiri\sum_{i=1}^7 \mathbf{J}_i^{\top} \boldsymbol{\Sigma}_i \mathbf{J}_i \delta \boldsymbol{x}=-\sum_{i=1}^7 \mathbf{J}_i^{\top} \boldsymbol{\Sigma}_i \mathbf{r}_i i=1∑7Ji⊤ΣiJiδx=−i=1∑7Ji⊤Σiri此累加过程,即对应前面可视化时各矩阵叠加。
3.2 边缘化过程
-
移除老的帧
假设窗口长度为3,在加入新的帧之前,需要先边缘化掉老的帧,即下图方框中的变量。
 用前述公式,可以表示为
用前述公式,可以表示为
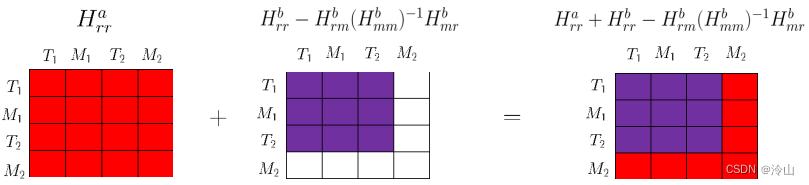
(Hrr−HrmHmm−1Hmr)δxr=br−HrmHmm−1bm\left(H_{r r}-H_{r m} H_{m m}^{-1} H_{m r}\right) \delta x_r=b_r-H_{r m} H_{m m}^{-1} b_m (Hrr−HrmHmm−1Hmr)δxr=br−HrmHmm−1bm但是在实际代码中,会把它拆成两步实现。第一步:使用和要边缘化掉的量无关的因子,构建剩余变量对应的Hessian矩阵。

上标 aaa 代表是第一步中的变量,包含Hessian矩阵的完整表达式为
Hrraδxr=braH_{r r}^a \delta x_r=b_r^a Hrraδxr=bra第二步:挑出和要边缘化掉的量相关的因子,构建待边缘化的Hessian矩阵,并使用舒尔补做边缘化。

上标 bbb 代表是第二步中的变量,包含Hessian矩阵的完整表达式为
[Hrrb−Hrmb(Hmmb)−1Hmrb]δxr=brb−Hrmb(Hmmb)−1bmb\left[H_{r r}^b-H_{r m}^b\left(H_{m m}^b\right)^{-1} H_{m r}^b\right] \delta x_r=b_r^b-H_{r m}^b\left(H_{m m}^b\right)^{-1} b_m^b [Hrrb−Hrmb(Hmmb)−1Hmrb]δxr=brb−Hrmb(Hmmb)−1bmb这一步形成的约束(上式)就叫先验因子,它包含了边缘化掉的量对剩余变量的约束关系。
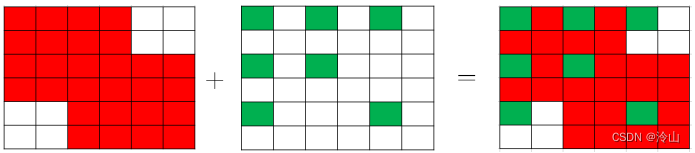
最终使用的是两步的叠加,Hessian矩阵叠加的可视化如下:
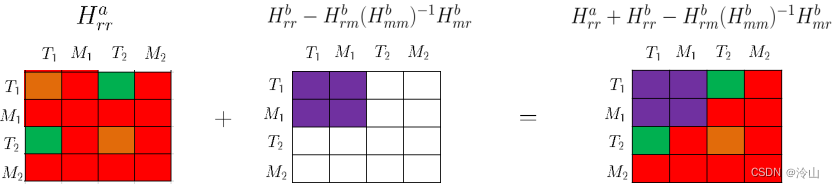
对应的完整公式为
Hrrδxr=brH_{r r} \delta x_r=b_r Hrrδxr=br其中
Hrr=Hrra+Hrrb−Hrmb(Hmmb)−1Hmrbbr=bra+brb−Hrmb(Hmmb)−1bmb\begin{gathered} H_{r r}=H_{r r}^a+H_{r r}^b-H_{r m}^b\left(H_{m m}^b\right)^{-1} H_{m r}^b \\ b_r=b_r^a+b_r^b-H_{r m}^b\left(H_{m m}^b\right)^{-1} b_m^b \end{gathered} Hrr=Hrra+Hrrb−Hrmb(Hmmb)−1Hmrbbr=bra+brb−Hrmb(Hmmb)−1bmb边缘化之后,模型如下:

注意:边缘化先验因子只有在第一次边缘化之前是不存在的,完成第一次边缘化之后就一直存在,并且随着后续新的边缘化进行,其内容不断更新。 -
添加新的帧
添加新的帧之后,模型如下:

此处直接给出新的Hessian矩阵可视化结果:

此后,随着定位过程的进行,便不断循环“边缘化老帧->添加新帧”的过程,从而维持窗口长度不变。
该过程的代码实现可参考后面lio-mapping的实现,理解后者便很容易实现前者。
4. lio-mapping 介绍
4.1 核心思想

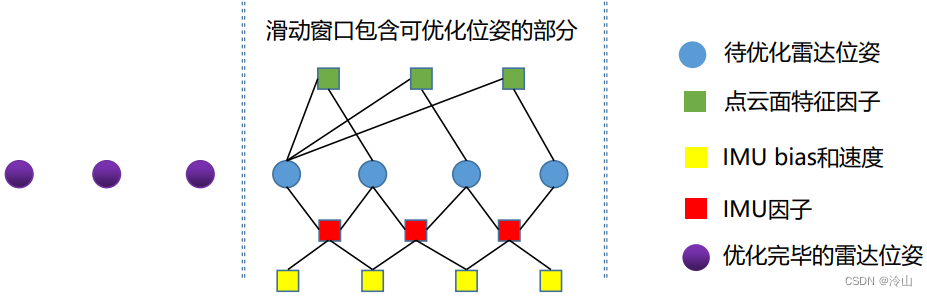
基于滑动窗口方法,把雷达线/面特征、IMU预积分等的约束放在一起进行优化。
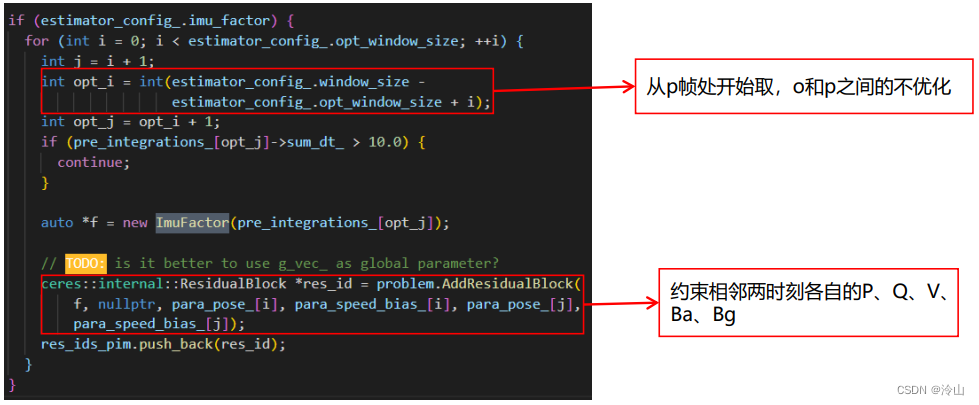
- 𝑜𝑜o 到 𝑖𝑖i 是滑窗;
- 只有 𝑝𝑝p 到 𝑖𝑖i 的位姿在滑窗中优化;
- 𝑜𝑜o 到 𝑝𝑝p 是为了构建局部地图,防止地图过于稀疏;
- 局部地图都投影到 𝑝𝑝p 的位姿处;
- 滑窗中点云约束是当前优化帧和局部地图特征匹配,因此特征对应的因子约束的是 𝑝𝑝p 帧和 𝑘𝑘k 帧(𝑝𝑝p<𝑘𝑘k<=𝑗𝑗j)。
其优化模型为
minX12{∥rP(X)∥2+∑m∈mLαα∈{p+1,⋯,j}∥rL(m,X)∥CLαm2+∑β∈{p,⋯,j−1}∥rB(zβ+1β,X)∥CBβ+1Bβ2}\begin{aligned} & \min _{\mathbf{X}} \frac{1}{2}\left\{\left\|\mathbf{r}_{\mathcal{P}}(\mathbf{X})\right\|^2+\sum_{\substack{m \in \mathbf{m}_{L_\alpha} \\ \alpha \in\{p+1, \cdots, j\}}}\left\|\mathbf{r}_{\mathcal{L}}(m, \mathbf{X})\right\|_{\mathbf{C}_{L_\alpha}^m}^2\right. \\ & \left.+\sum_{\beta \in\{p, \cdots, j-1\}}\left\|\mathbf{r}_{\mathcal{B}}\left(z_{\beta+1}^\beta, \mathbf{X}\right)\right\|_{\mathbf{C}_{B_{\beta+1}}^{B_\beta}}^2\right\} \end{aligned} Xmin21⎩⎨⎧∥rP(X)∥2+m∈mLαα∈{p+1,⋯,j}∑∥rL(m,X)∥CLαm2+β∈{p,⋯,j−1}∑rB(zβ+1β,X)CBβ+1Bβ2⎭⎬⎫其中
rP(X)\mathbf{r}_{\mathcal{P}}(\mathbf{X})rP(X) 是边缘化产生的先验因子对应的残差;
rL(m,X)\mathbf{r}_{\mathcal{L}}(m, \mathbf{X})rL(m,X) 是点云特征匹配对应的残差;
rB(zβ+1β,X)\mathbf{r}_{\mathcal{B}}\left(z_{\beta+1}^\beta, \mathbf{X}\right)rB(zβ+1β,X) 是IMU约束对应的残差。
4.2 具体流程
流程讲解思路:
• 以前述kitti中实现原理为基础,此处只是多了点云特征的约束;
• 只介绍可借鉴的内容,因此不介绍bias、外参初始化和外参优化等内容。
4.2.1 各类因子
-
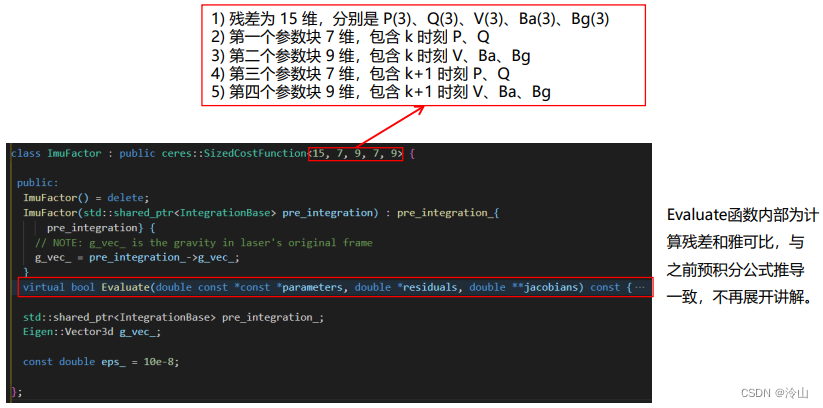
定义IMU 因子
-
添加imu因子
-
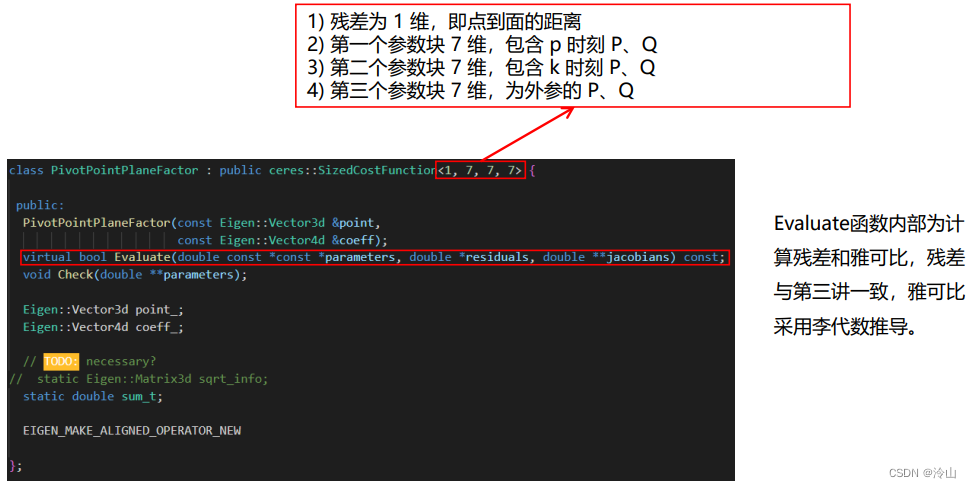
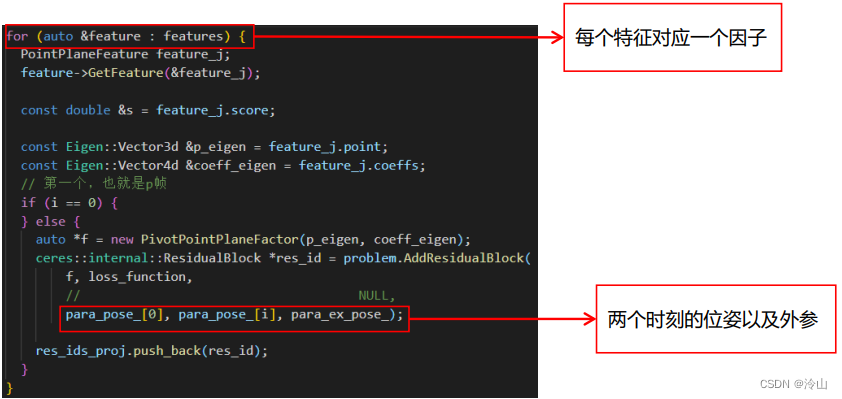
定义点云面特征因子
-
添加点云面特征
-
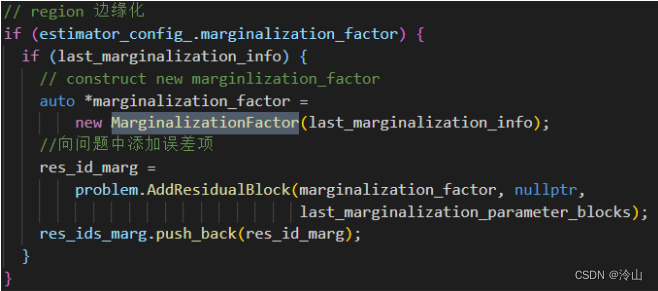
定义边缘化先验因子

由于不确定边缘化后会和哪些量产生关联,因此没有固定size。
其详细内容待讲解边缘化实现时再展开。 -
添加边缘化先验因子
4.2.2 滑窗模型
• 帧与帧之间通过特征约束,因此没有了激光里程计因子。
• 当前模型中没有使用点云的线特征。
-
IMU预积分和优化变量的残差
一个因子约束两个位姿,并约束两个时刻 IMU 的速度与 bias

残差关于优化变量的雅可比可视化如下:

因此对应的Hessian矩阵的可视化为:

-
点云面特征对应的残差
一个因子约束两个位姿

残差关于优化变量的雅可比可视化如下:

因此对应的Hessian矩阵的可视化为

-
完整模型
 以上工程,就是前述代码中添加各类因子到模型的过程。
以上工程,就是前述代码中添加各类因子到模型的过程。
4.2.3 边缘化
-
边缘化模型

需要边缘化掉的为方框中的变量 -
边缘化可视化
第一步:使用和要边缘化掉的量无关的因子,构建剩余变量对应的Hessian矩阵。

第二步:挑出和要边缘化掉的量相关的因子,构建待边缘化的Hessian矩阵,并使用舒尔补做边缘化。

对应的完整Hessian矩阵就是他们合在一起的结果。
-
边缘化实现
核心思路是把要边缘化掉的变量,以及跟这些变量被同一个因子约束的变量,汇总在一起。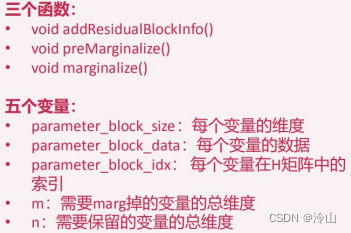
在该例中,把和模型无关的量去除,剩余部分如下(设每帧有20个面特征)
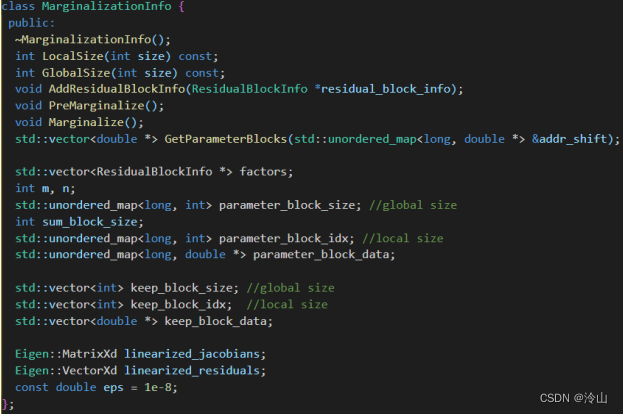
因此,放入MarginalizationInfo中的信息包括:
5个变量: T0M0T1M1T2T_0 \quad M_0 \quad T_1 \quad M_1 T_2T0M0T1M1T2
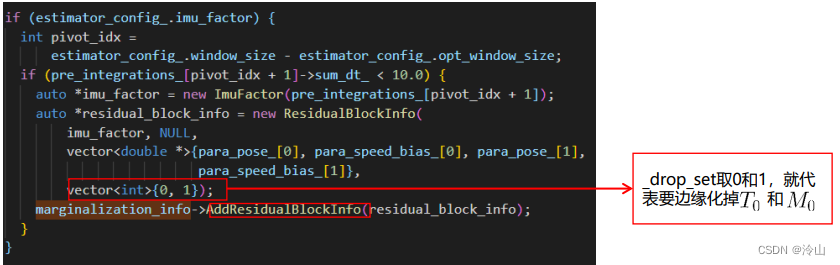
41个因子: 40 个面特征因子、1个IMU因子
(此处假设的是第一次进行边缘化,若不是第 一次,因子中还应该有边缘化先验因子)
找出所有变量后,需要知道哪些是应该边缘化的,哪些是应该保留的。
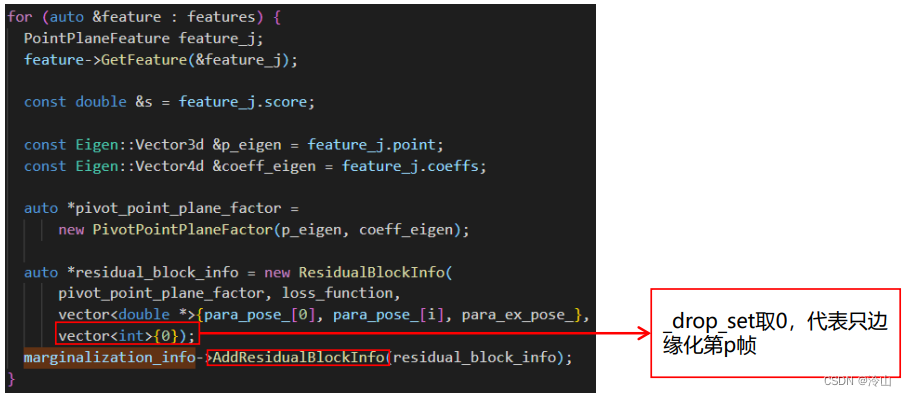
右图代码中,形参里_parameter_blocks包含所有相关参数,而_drop_set即为这些参数中要边缘化掉的参数的id。
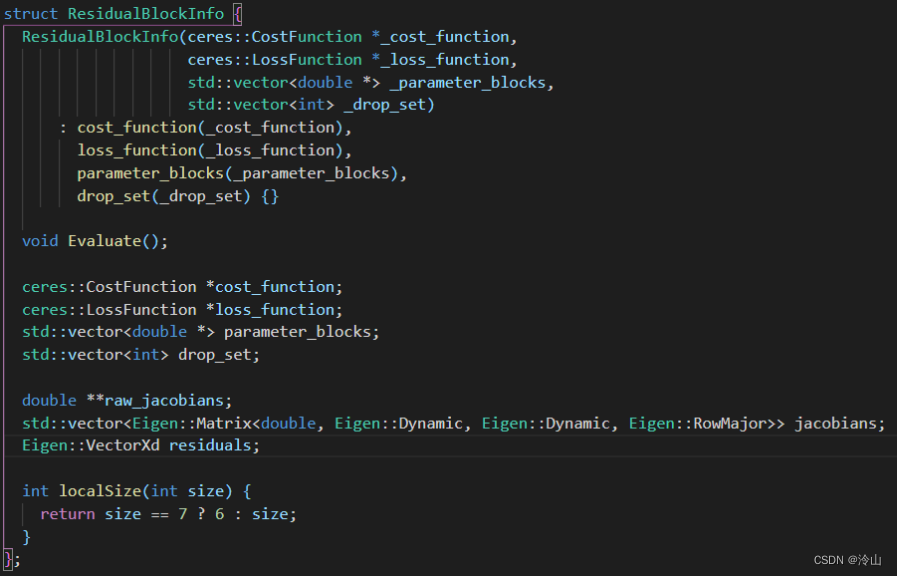
添加和IMU因子相关的ResidualBlockInfo
添加和面特征因子相关的ResidualBlockInfo
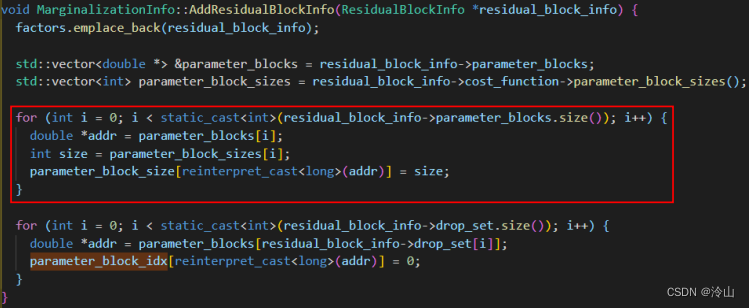
在添加以上ResidualBlockInfo的同时,核心变量parameter_block_size 就被赋值。
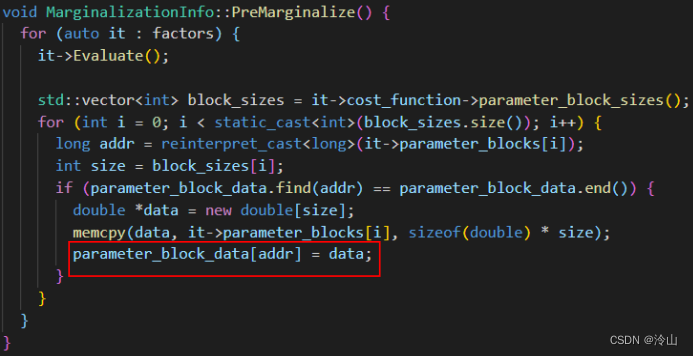
第二个核心函数的作用是计算每个因子对应的变量(parameter_blocks)、误差项(residuals)、雅可比矩阵(jacobians),并把变量数值放到parameter_block_data中。
第三个核心函数的作用构建Hessian矩阵,Schur掉需要marg的变量,得到对剩余变量的约束,即为边缘化约束(先验约束)。
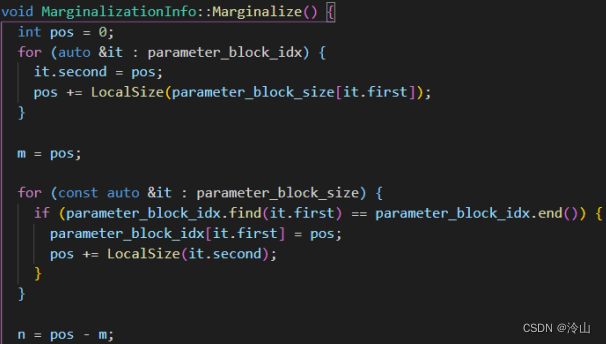
函数的前半部分,对m、n和parameter_block_idx 这三个核心变量进行了赋值。
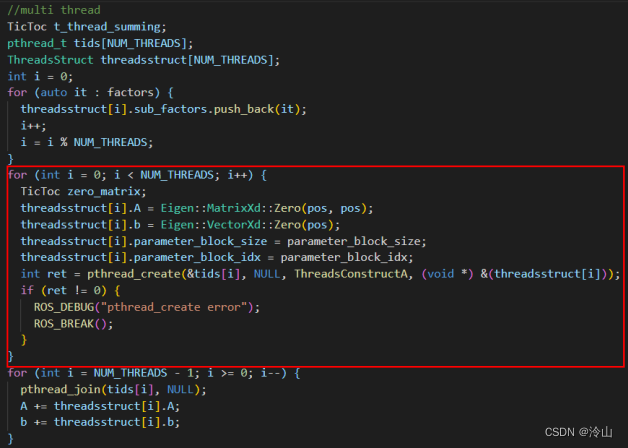
函数的中间部分开始构建Hessian 矩阵,由于使用多线程,因此要给不同的线程平均分配因子。
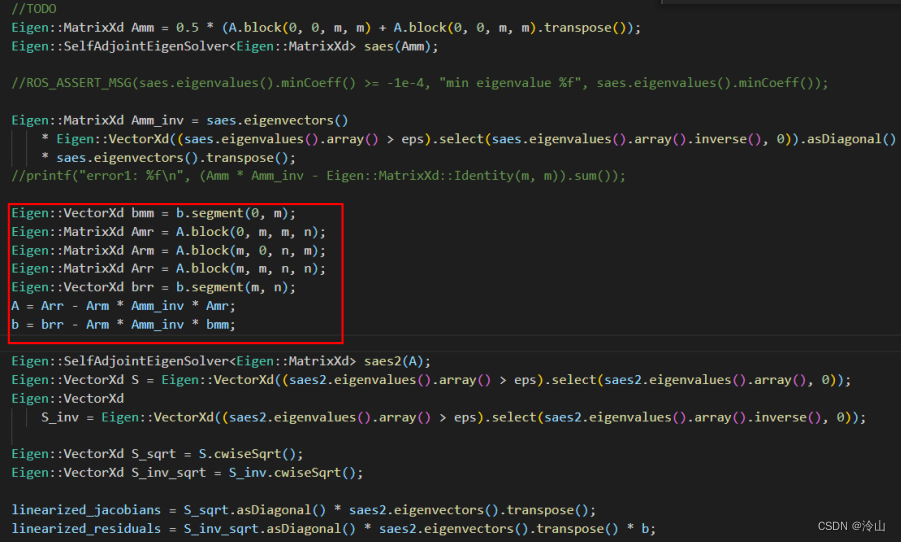
函数的最后便是执行边缘化,得到边缘化先验因子。
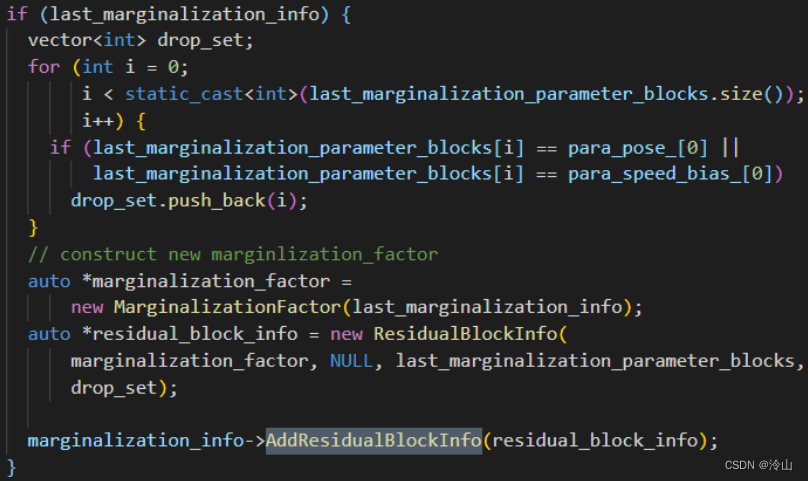
上述过程是假设第一次执行边缘化,当不是第一次时,步骤上只是多了在AddResidualBlockInfo时把边缘化先验因子也加入进来,剩余过程不变。
4.2.4 添加新帧
边缘化之后,模型如下:

注意:由于面特征因子都是和第一帧(T0T_0T0)关联,当它边缘化掉之后,该因子便不存在,因此在加入新的帧的同时,还需要构建所有帧和当前第一帧(T1T_1T1)的面特征关联。
添加新的帧以后,模型如下:

Hessian矩阵可视化如下:

此后不断循环该过程,便可以实现lio功能。