当前位置: 首页 > news >正文 ROS机器人编程---------(一)安装ROS news 2025/7/12 15:16:02 安装ROS 打开终端按顺序执行下面命令 默认安装在/opt/ros路径下 打开一个终端输入roscore 测试是否安装成功 启动ROS Master roscore 启动小海龟仿真器 rosrun turtlesim turtlesim_node 启动海龟控制结点 rosrun turtlesim turtlesim_teleop_key 使用键盘方向键控制小海龟移动 查看全文 http://www.lryc.cn/news/150569.html 相关文章: Maven入门教程(一):安装Maven环境 CSS中可继承与不可继承属性 Vscode画流程图 【K8S系列】深入解析k8s网络插件—Cilium OpenCV(十六):高斯图像金字塔 Nginx配置及优化3 网络直播源码UDP协议搭建:为平台注入一份力量 Ubuntu/linux系统环境变量配置详解 kafka配置SASL/PLAIN 安全认证 pdf加密如何解除?这样解除加密很简单 Ubuntu18.04使用Systemback制作系统镜像并还原 OpenCV(十五):拷贝图像 原神世界中的顺序表:派蒙的趣味数据结构讲解 电脑入门:路由器 基本设置操作说明 搜索与图论-拓扑序列 「MySQL-05」MySQL Workbench的下载和使用 编译期jni类型转换成字符串 优秀的ui设计作品(合集) 【c/c++】c和cpp混合编译 springboot定制banner Qt 入门实战教程(目录) Ceph入门到精通-Lunix性能分析工具汇总 服务器端使用django websocket,客户端使用uniapp 请问服务端和客户端群组互发消息的代码怎么写的参考笔记 【考研数学】线性代数第四章 —— 线性方程组(2,线性方程组的通解 | 理论延伸) go读取文件的几种方法 ChatGPT癌症治疗“困难重重”,真假混讲难辨真假,准确有待提高 docker打包vue vite前端项目 zookeeper 查询注册的 dubbo 服务 【每日一题】57. 插入区间 youtubu视频下载和yt-dlp 使用教程
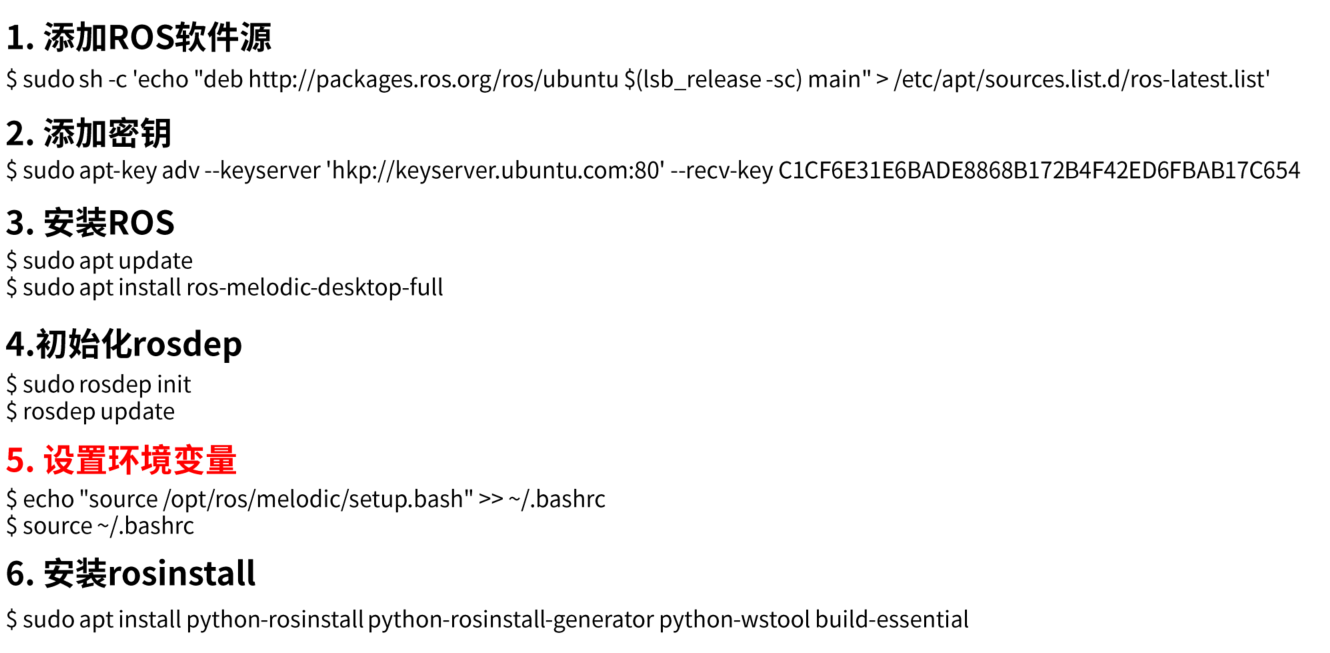
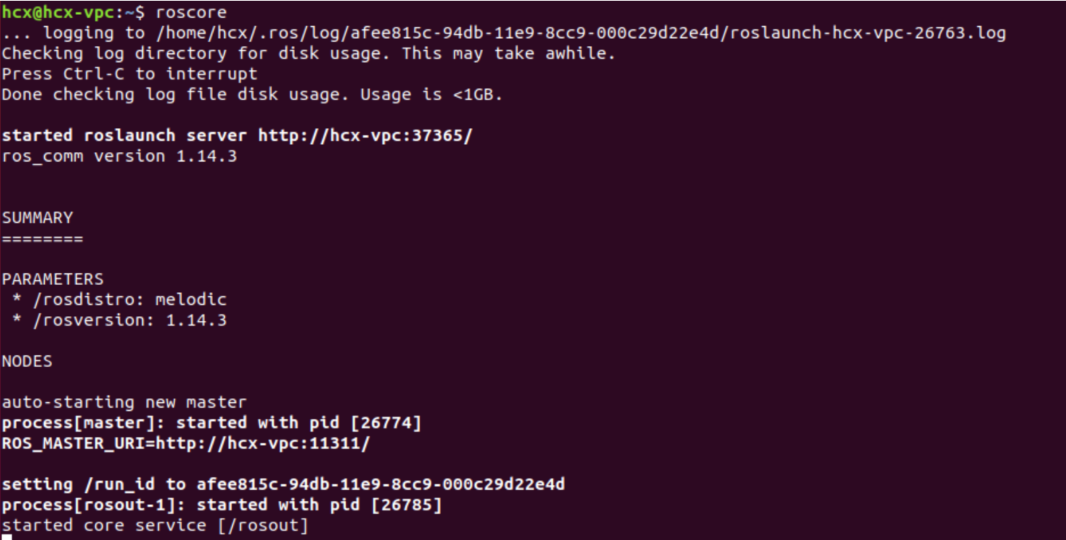
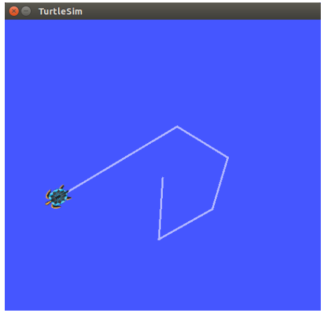
安装ROS 打开终端按顺序执行下面命令 默认安装在/opt/ros路径下 打开一个终端输入roscore 测试是否安装成功 启动ROS Master roscore 启动小海龟仿真器 rosrun turtlesim turtlesim_node 启动海龟控制结点 rosrun turtlesim turtlesim_teleop_key 使用键盘方向键控制小海龟移动 查看全文 http://www.lryc.cn/news/150569.html 相关文章: Maven入门教程(一):安装Maven环境 CSS中可继承与不可继承属性 Vscode画流程图 【K8S系列】深入解析k8s网络插件—Cilium OpenCV(十六):高斯图像金字塔 Nginx配置及优化3 网络直播源码UDP协议搭建:为平台注入一份力量 Ubuntu/linux系统环境变量配置详解 kafka配置SASL/PLAIN 安全认证 pdf加密如何解除?这样解除加密很简单 Ubuntu18.04使用Systemback制作系统镜像并还原 OpenCV(十五):拷贝图像 原神世界中的顺序表:派蒙的趣味数据结构讲解 电脑入门:路由器 基本设置操作说明 搜索与图论-拓扑序列 「MySQL-05」MySQL Workbench的下载和使用 编译期jni类型转换成字符串 优秀的ui设计作品(合集) 【c/c++】c和cpp混合编译 springboot定制banner Qt 入门实战教程(目录) Ceph入门到精通-Lunix性能分析工具汇总 服务器端使用django websocket,客户端使用uniapp 请问服务端和客户端群组互发消息的代码怎么写的参考笔记 【考研数学】线性代数第四章 —— 线性方程组(2,线性方程组的通解 | 理论延伸) go读取文件的几种方法 ChatGPT癌症治疗“困难重重”,真假混讲难辨真假,准确有待提高 docker打包vue vite前端项目 zookeeper 查询注册的 dubbo 服务 【每日一题】57. 插入区间 youtubu视频下载和yt-dlp 使用教程