KUKA机器人零点标定的具体方法

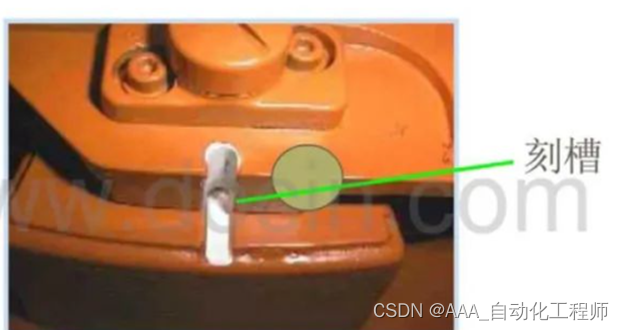
在进行机器人校正时,先将各轴置于一个定义好的机械位置,即所谓的机械零点。这个机械零点位置表明了同轴的驱动角度之间的对应关系,它用一个测量刻槽表示。
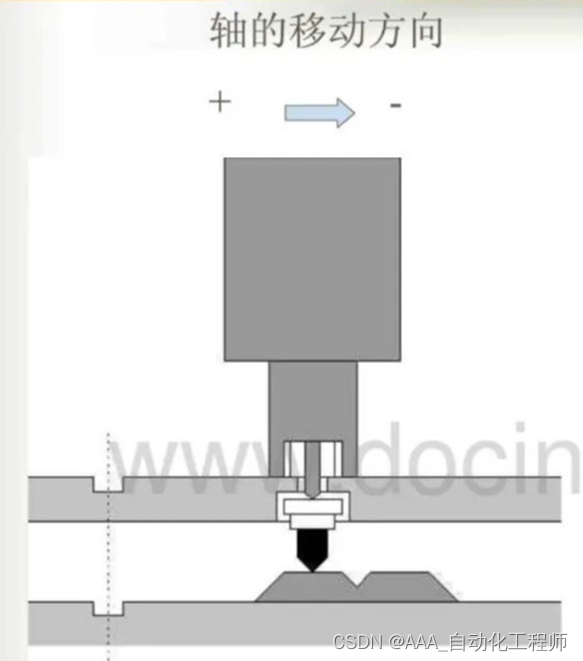
为了精确地确定机器人某根轴的机械零点位置,一般应先找到其预校正位置,然后去掉测量头的保护盖,并装上EMT(千分表),

机器人的校正必须始终在同样的温度条件下进行,以避免由于热膨胀而引起的误差。

校正时,各轴必须从+ 到 -查找零点,如果必须由 – 到+转动某一个轴,则必须先转过预校正位置,然后再重新回到标记处。这样可以消除传动反向间隙。