当前位置: 首页 > news >正文 机械臂+2d相机实现复合机器人定位抓取 news 2025/8/8 7:08:33 硬件参数 机械臂:艾利特 相机:海康相机 2d识别库:lindmod,github可以搜到 光源:磐鑫光源 软件参数 系统:windows / Linux 开发平台:Qt 开发语言:C++ 开发视觉库:OpenCV 软件模块 机械臂控制模块 机械臂点位模块 机械臂IO状态模块 光源模块 手眼标定模块 机台通讯模块 流程监控模块 日志模块 软件截图 查看全文 http://www.lryc.cn/news/145377.html 相关文章: 网络编程 http 相关基础概念 LatexEasy公式渲染教程 十年测试工程师叙述自动化测试学习思路 SpringAOP详解(下) 主流软件漏洞跟踪 Apache RocketMQ NameServer 远程代码执行漏洞(CVE-2023-37582) Element table根据字段合并表格(可多字段合并),附带拖拽列动态合并 C++标准库STL容器详解 ParNew垃圾收集器(Serial+多线程)是干什么用的? 【Android】AES解密抛出异常Cipher functions:OPENSSL_internal:WRONG_FINAL_BLOCK_LENGTH 菜鸟教程《Python 3 教程》笔记(2):数据类型转换 JVM运行时参数查看 每日一题:leetcode 1267 统计参与通信的服务器 Unity打包Windows程序,概率性出现无法全屏或分辨率不匹配 消息中间件 介绍 JAVA-字符串长度 [oneAPI] 基于BERT预训练模型的SWAG问答任务 如何为winform控件注册事件 【LeetCode-面试经典150题-day15】 git查看和修改项目远程仓库地址 JavaWeb 速通JSON 20 MySQL(下) 测试圈的网红工具:Jmeter到底难在哪里?! 深度学习10:Attention 机制 简单着色器编写(中下) matlab使用教程(24)—常微分方程(ODE)求解器 企业级数据共享规模化模式 Web服务器-Tomcat详细原理与实现 ARM处理器核心概述 万户协同办公平台 ezoffice存在未授权访问漏洞 附POC 使用ctcloss训练矩阵生成目标字符串
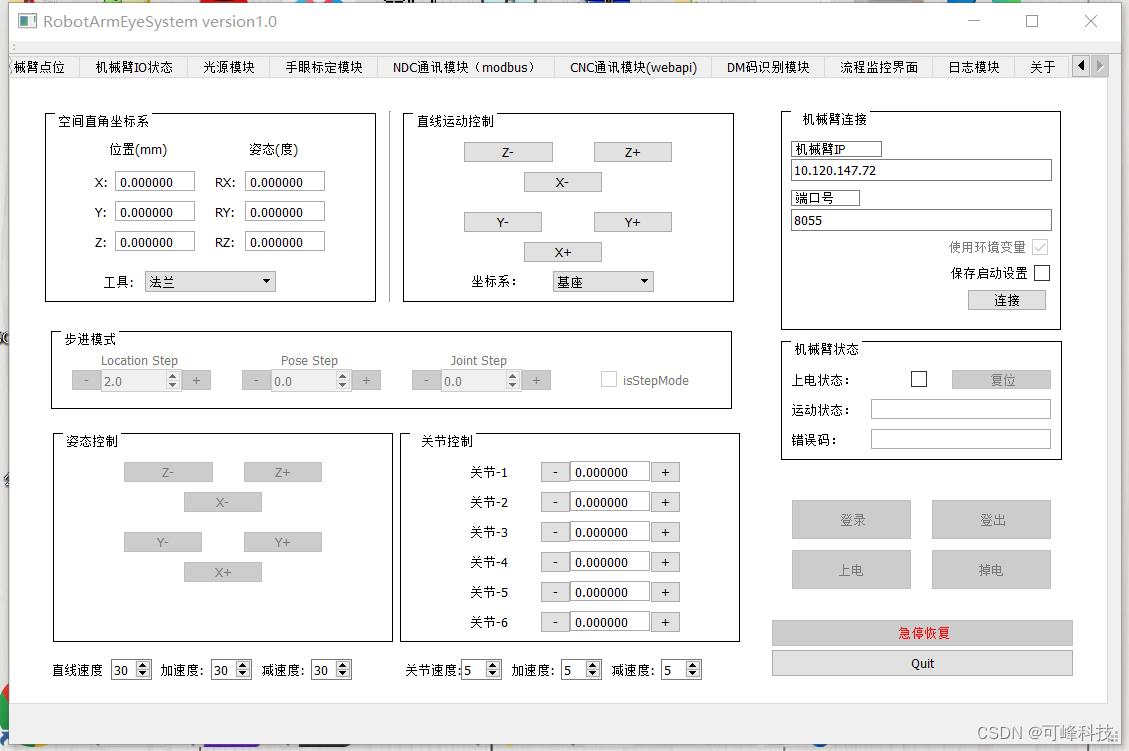
硬件参数 机械臂:艾利特 相机:海康相机 2d识别库:lindmod,github可以搜到 光源:磐鑫光源 软件参数 系统:windows / Linux 开发平台:Qt 开发语言:C++ 开发视觉库:OpenCV 软件模块 机械臂控制模块 机械臂点位模块 机械臂IO状态模块 光源模块 手眼标定模块 机台通讯模块 流程监控模块 日志模块 软件截图 查看全文 http://www.lryc.cn/news/145377.html 相关文章: 网络编程 http 相关基础概念 LatexEasy公式渲染教程 十年测试工程师叙述自动化测试学习思路 SpringAOP详解(下) 主流软件漏洞跟踪 Apache RocketMQ NameServer 远程代码执行漏洞(CVE-2023-37582) Element table根据字段合并表格(可多字段合并),附带拖拽列动态合并 C++标准库STL容器详解 ParNew垃圾收集器(Serial+多线程)是干什么用的? 【Android】AES解密抛出异常Cipher functions:OPENSSL_internal:WRONG_FINAL_BLOCK_LENGTH 菜鸟教程《Python 3 教程》笔记(2):数据类型转换 JVM运行时参数查看 每日一题:leetcode 1267 统计参与通信的服务器 Unity打包Windows程序,概率性出现无法全屏或分辨率不匹配 消息中间件 介绍 JAVA-字符串长度 [oneAPI] 基于BERT预训练模型的SWAG问答任务 如何为winform控件注册事件 【LeetCode-面试经典150题-day15】 git查看和修改项目远程仓库地址 JavaWeb 速通JSON 20 MySQL(下) 测试圈的网红工具:Jmeter到底难在哪里?! 深度学习10:Attention 机制 简单着色器编写(中下) matlab使用教程(24)—常微分方程(ODE)求解器 企业级数据共享规模化模式 Web服务器-Tomcat详细原理与实现 ARM处理器核心概述 万户协同办公平台 ezoffice存在未授权访问漏洞 附POC 使用ctcloss训练矩阵生成目标字符串