opencv 进阶15-检测DoG特征并提取SIFT描述符cv2.SIFT_create()
前面我们已经了解了Harris函数来进行角点检测,因为角点的特性,这些角点在图像旋转的时候也可以被检测到。但是,如果我们放大或缩小图像时,就可能会丢失图像的某些部分,甚至有可能增加角点的质量。这种损失的现象需要一种与图像比例无关的角点检测方法来解决。
SIFT(Scale-Invariant Feature Transform)尺度不变特征变换可以解决这个问题。
注意: SIFT 并不检测关键点(关键点由Difference of Gaussians检测),SIFT会通过一个特征向量来描述关键点周围区域的情况。DoG操作的最终结果会得到感兴趣的区域(关键点),这将通过SIFT来进行说明。
函数说明:
sift =cv2.SIFT_create([, nfeatures[, nOctaveLayers[,
contrastThreshold[, edgeThreshold]]]])
参数:
-
nfeatures: 保留的最佳功能的数量。这些特征按其分数排名(在SIFT算法中作为局部对比度测量)。
-
nOctaveLayers:每个八度中的层数。3是D.Lowe(原作者)论文中使用的值。八度的数量是根据图像分辨率自动计算的。
-
contrastThreshold:用于过滤掉半均匀(低对比度)区域中的弱特征的对比度阈值。阈值越大,检测器产生的特征越少。应用过滤时,对比度阈值将被nOctaveLayers除。当nOctaveLayers设置为默认值并且如果要使用D.Lowe论文中使用的值0.03时,请将此参数设置为0.09。
-
edgeThreshold:用于过滤边缘特征的阈值。请注意,其含义与contrastThreshold不同,即edgeThreshold越大,滤除的特征越少(保留的特征越多)。
返回值:
- sift:实例化一个sift特征检测器。
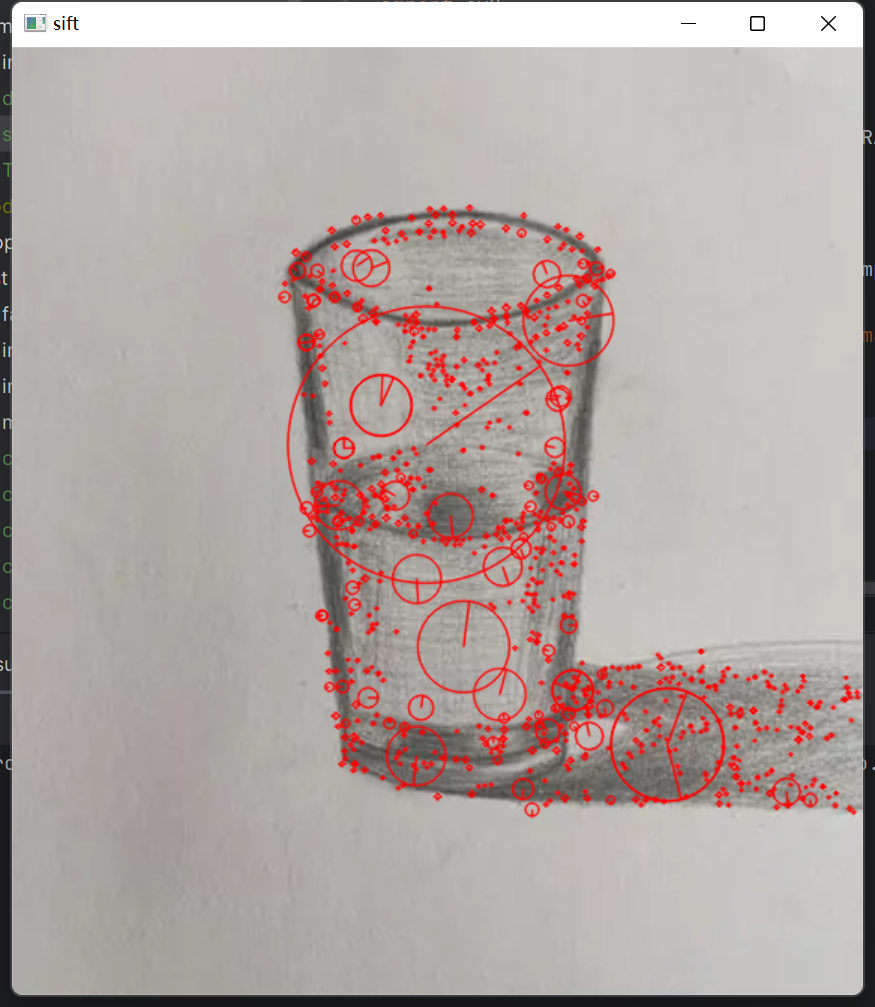
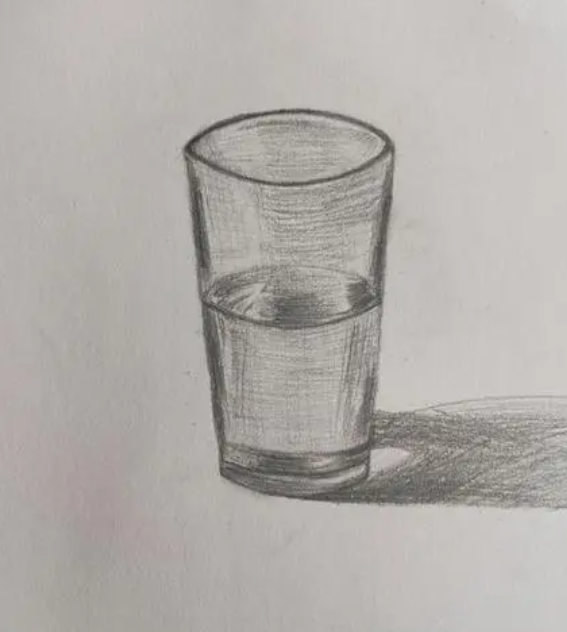
示例:对图像检测DoG特征并提取SIFT描述符
实验原图:
import cv2
import numpy as npimg = cv2.imread('images\\sumian.png')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)sift = cv2.xfeatures2d.SIFT_create()
keypoints, descriptor = sift.detectAndCompute(gray, None)img = cv2.drawKeypoints(image= img, outImage= img, keypoints= keypoints, flags= cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS, color= (0, 0, 255))cv2.imshow('sift', img)
cv2.waitKey()
cv2.destroyAllWindows()发现是,如果你沿用之前的代码即
descriptor = cv2.xfeatures2d.SIFT_create()
会出现一个warning,但不影响结果。
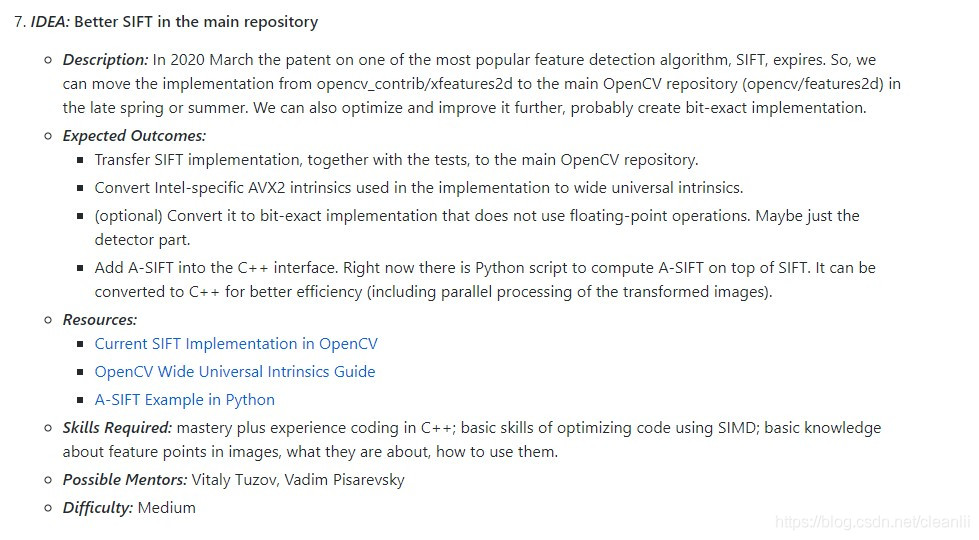
[ WARN:0@0.037] global shadow_sift.hpp:15 cv::xfeatures2d::SIFT_create DEPRECATED: cv.xfeatures2d.SIFT_create() is deprecated due SIFT tranfer to the main repository. https://github.com/opencv/opencv/issues/16736
这是因为新版本的SIFT可以直接引用,不再需要安装contrib包,即
descriptor = cv2.SIFT_create()
官方公告可参见 OpenCV Google Summer of Code 2020
新代码如下:
import cv2img = cv2.imread('images\\sumiao.png')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)#sift = cv2.xfeatures2d.SIFT_create()
sift = cv2.SIFT_create()
keypoints, descriptor = sift.detectAndCompute(gray, None)img = cv2.drawKeypoints(image= img, outImage= img, keypoints= keypoints, flags= cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS, color= (0, 0, 255))cv2.imshow('sift', img)
cv2.waitKey()
cv2.destroyAllWindows()
运行效果: