无人机航管应答机 ping200XR
产品概述
ping200XR是一个完整的系统,旨在满足航管应答器和自动相关监视广播(ADS-B)的要求,在管制空域操作无人航空系统(UAS)。该系统完全可配置为模式A,模式C,模式S转发器和扩展ADS-B发射机的任何组合。ping200XR包括一个精度超过60000英尺的气压传感器和专门为无人机系统(UAS)设计的SBAS全球定位系统(GPS)位置源(TSO-c145e)。

技术规格
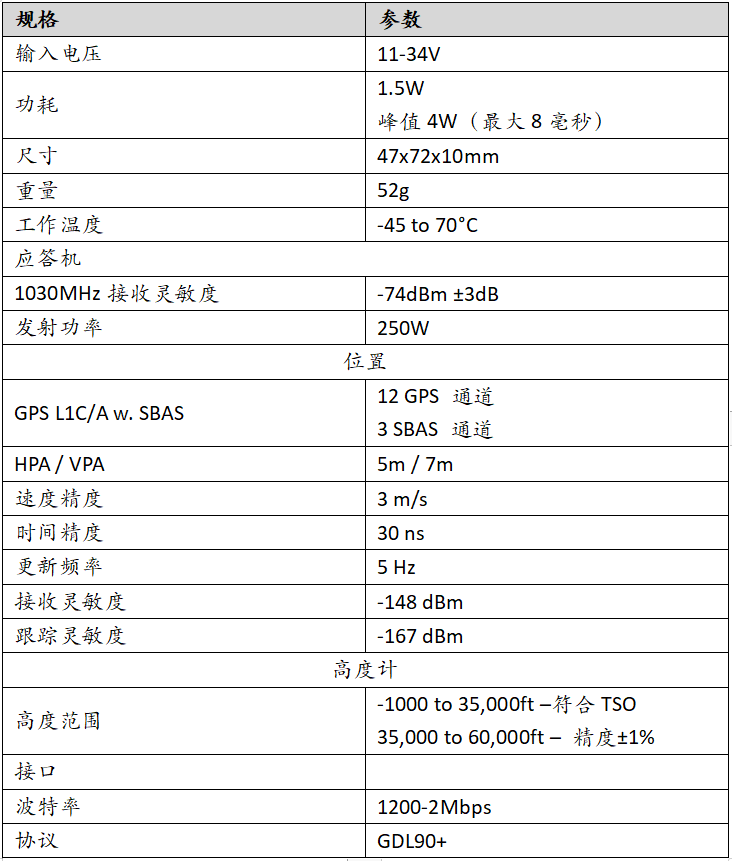
机械尺寸
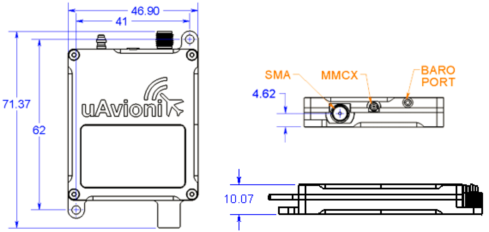
ping200XR是一个完整的系统,旨在满足航管应答器和自动相关监视广播(ADS-B)的要求,在管制空域操作无人航空系统(UAS)。该系统完全可配置为模式A,模式C,模式S转发器和扩展ADS-B发射机的任何组合。ping200XR包括一个精度超过60000英尺的气压传感器和专门为无人机系统(UAS)设计的SBAS全球定位系统(GPS)位置源(TSO-c145e)。