LabVIEW开发分段反射器测试台
LabVIEW开发分段反射器测试台
随着对太空的观察需求越来越远,而不是当前技术(如哈勃望远镜)所能达到的,有必要增加太空望远镜主镜的尺寸。但是,增加主镜像的大小时存在几个问题。随着反射镜尺寸的增加,制造精确的抛物面镜变得更加困难。单个单片主镜的尺寸受到当前空间运载火箭的尺寸和重量限制的限制。
航天中心团队开发了一种望远镜测试台,该测试台模拟了焦距为2.4米的卡塞格林望远镜,其性能可与实际的星载系统相媲美。它由一个由七个六角形面板制成的主镜,一个副镜和轻质柔性桁架结构组成。每个外围面板由三个线性电磁执行器控制。每个面板使用四个边缘位置传感器来提供相对位移和角度。次镜是六面锥形镜,用于将光从主镜反射到焦平面。
由于镜子形状需要精度和准确度,因此定期验证传感器校准非常重要。传感器的校准可以牢固地确定测量设备的精度。与所需增益的任何偏差和校准中的任何非线性都会导致与所需反射镜形状的偏差。
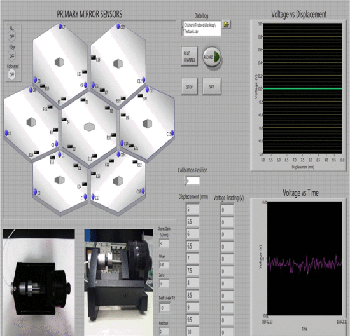
LabVIEW可用于实时系统监测。为了更精确地检查传感器校准的线性,并加快检查SPACE测试台上42个传感器的过程,LabVIEW用于开发该过程的辅助工具。
所使用的传感器是电感式位移传感器。电感式位移传感器利用了法拉第感应定律,当目标材料进入该场时,材料中会产生涡流。这些涡流是交变磁场的结果,并在导电材料内循环。与交流磁场感应电流相反,导体中的交流电将导致交流磁场。这种新感应的磁场将与传感器线圈产生的磁场相对立。
太空望远镜试验台共有42个电感式传感器;24个是边缘传感器,18个是并置传感器。对于反射镜形状所需的精度和准确度,定期验证传感器校准并检查与所需增益和线性度的偏差非常重要。为此,必须在工作动态范围(±2mm)内对每个传感器进行传感器电压输出测量。然后,每个传感器的电压输出和位移之间的线性相关性可以通过手动计算。
对于SPACE测试平台,需要4V/mm的线性增益。GUI在实验室的测试设备上测试了备用传感器。
LabVIEW为测试台的传感器提供了最佳的线性拟合、斜率和残差,可以从检查传感器需要增益,如果不满足要求,则使用传感器校准程序更改传感器线性度。