0基础学习VR全景平台篇 第81篇:全景相机-临云镜如何直播推流
临云镜全景相机是阿里巴巴定制全景设备,实现空间三维信息的快速采集,与阿里云三维空间重建平台搭配,帮助品牌商与平台以较低的成本完成空间的快速采集,并支持对室内/室外空间的三维全景展示及空间漫游,同时支持VR浏览、设备的接入,从而实现空间数据的采集、管理与营销应用。
临云镜客户端分为IOS版本和Android版本,目前Android版本功能更全,推荐使用Android版本。本文也会详细介绍Android客户端的直播方法,APK的安装包可联系蛙色VR运维获取,然后下载到手机安装即可。
相机可使用有线或无线的方式连接至网络
一、有线联机:通过 USB to LAN 转接线将相机连上集线器,接上网络后, 等待OLED显示IP即表示连线成功。

1、相机开机,注意记录相机显示屏上面的热点名称(SSID)和密码(PWD)。

2、进入临云镜的APP,取消更新版本。

然后点击右上方的“ WiFi”图标,选择相机的热点名称,并输入密码(此热点和密码即相机开机时显示的SSID和PWD)。


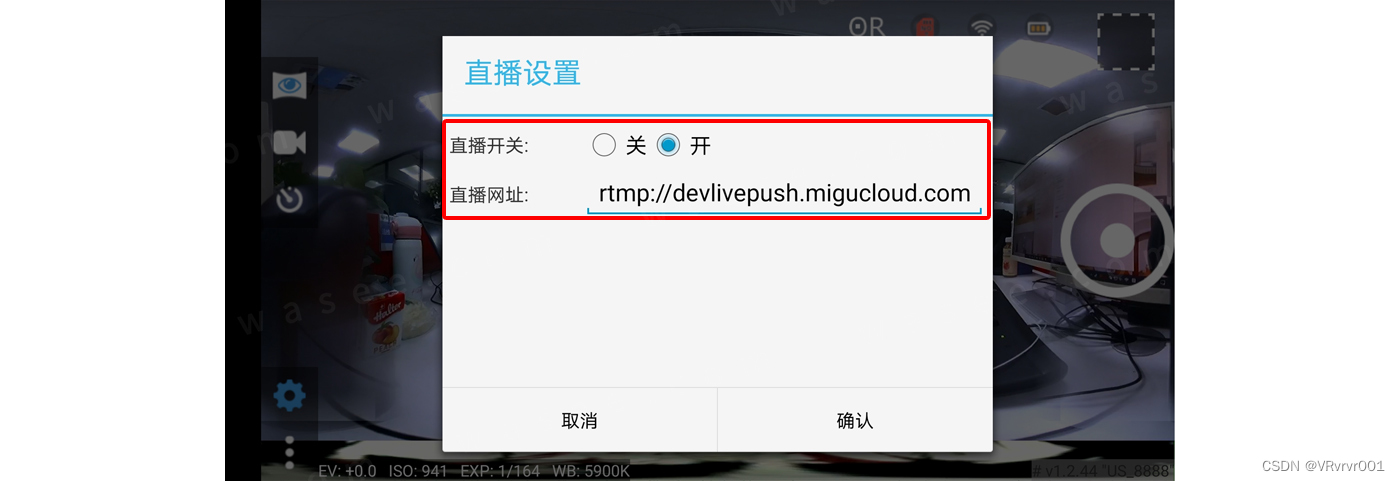
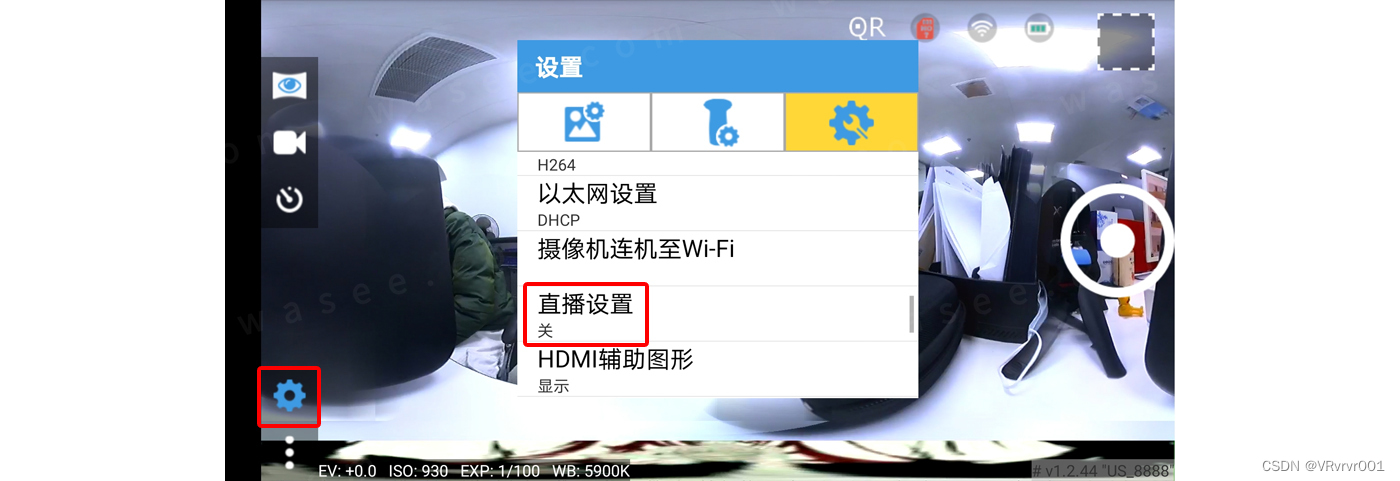
3、点击左下角的“设置”菜单,选择“直播设置”,打开直播开关,填入蛙色VR直播间的推流地址,确认后便可开启直播。

二、无线联机:使用临云镜APP的“摄像机连机至 Wi-Fi”功能进行联机。
1、重复以上有线联机的第一和第二步骤,进入临云镜APP连接相机的热点。
2、相机热点连接成功后,APP中可能会出现如下提示,选择“使用”。

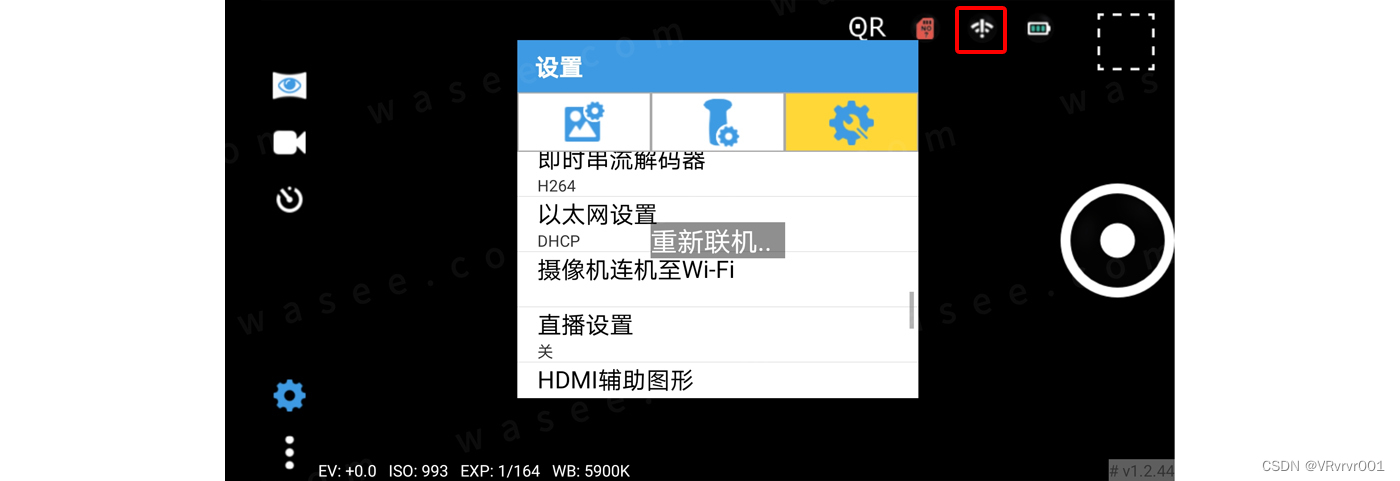
3、点击左下角的“设置”菜单,选择“摄像机连机至Wi-Fi”
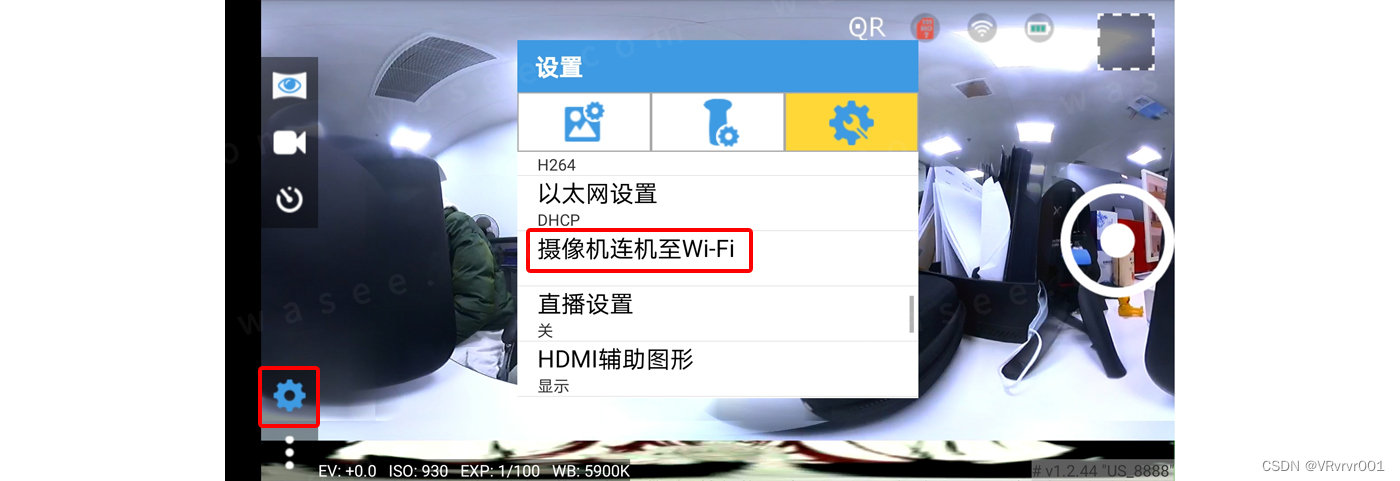
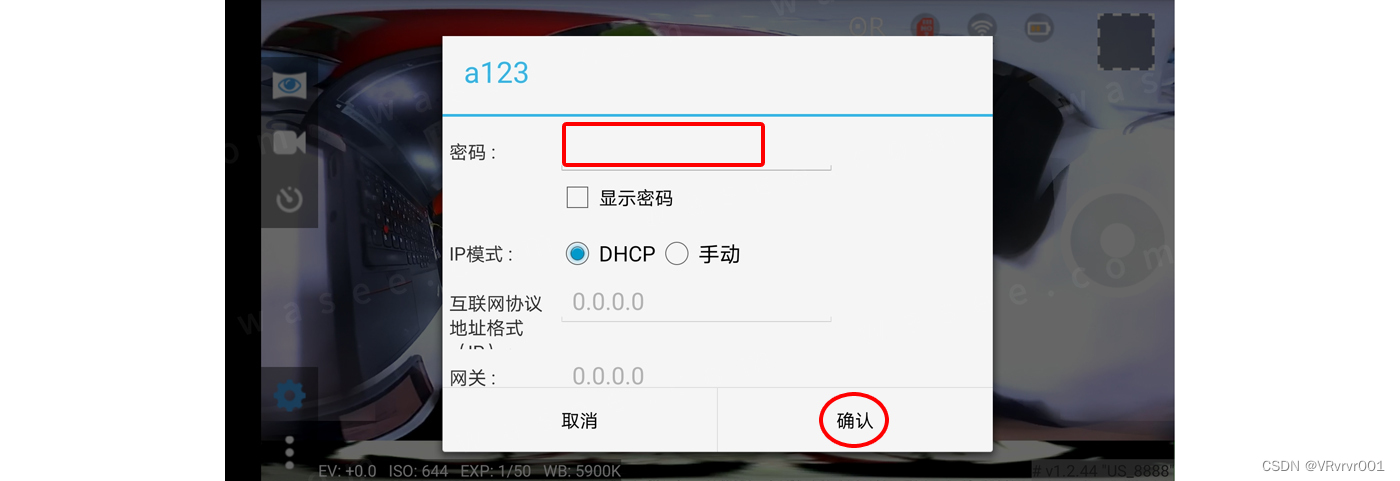
选择要连接的无线网络,输入密码后确认。

无线网络连接成功后,APP中会出现如下提示

同时,相机显示屏上也会出现已连接的无线网络名称和一个IP地址,注意记录该IP数值。

4、点击APP右上方的“ WiFi”图标
点击远端IP地址,将这个IP值改成此时相机上面显示的数据,Port数值不变,然后“联机”。


5、联机后,点击“直播设置”,打开直播开关,填入蛙色VR直播间的推流地址,确认后便可开启直播。