卡尔曼滤波 | Matlab实现无迹kalman滤波仿真
文章目录
- 效果一览
- 文章概述
- 研究内容
- 程序设计
- 参考资料
效果一览
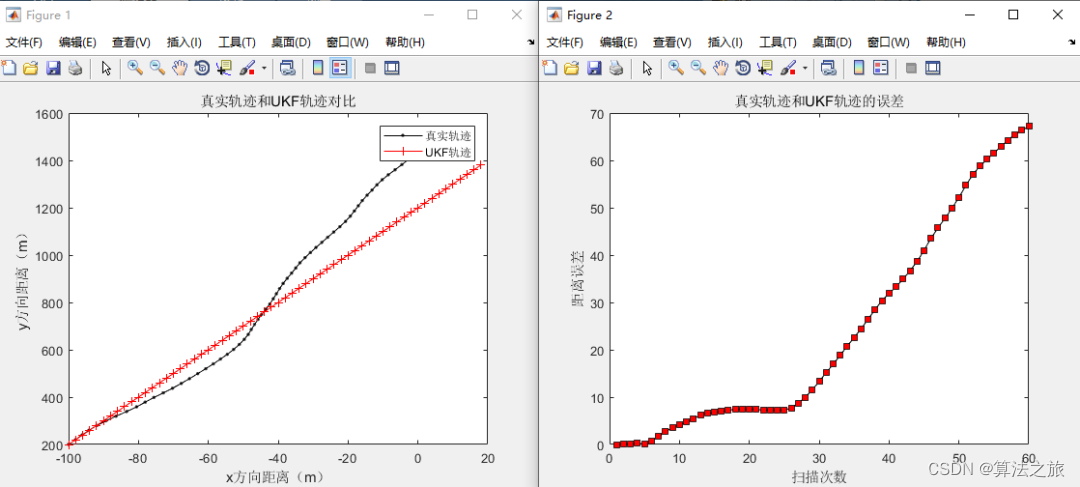
文章概述
卡尔曼滤波 | Matlab实现无迹kalman滤波仿真
研究内容
无迹kalman滤波(UKF)不是采用的将非线性函数线性化的做法。无迹kalman仍然采用的是线性kalman滤波的架构,对于一步预测方程,使用无迹变换(UT)来处理均值和协方差的非线性传递问题。UKF算法是对非线性函数的概率密度分布进行近似,用一系列确定样本来逼近状态的后验概率密度,而不是对非线性函数进行近似,不需要对雅可比矩阵进行求导。UKF没有高阶项忽略,因此对于非线性分布的统计量有较高的精度,有效克服了扩展Kalman滤波的估计精度低、稳定性差的缺陷。
无迹变换(UT变换)
UT变换其实现原理是在原来分布中按照某个规则去取点,使这些点的均值和协方差状态分布与原状态分布的均值和协方差相等;将这些点带入非线性函数中,