PSO粒子群优化算法
PSO粒子群优化算法
- 算法思想
- matlab代码
- python代码
算法思想
粒子群算法(Particle Swarm Optimization)



优点:
1)原理比较简单,实现容易,参数少。
缺点:
1)易早熟收敛至局部最优、迭代后期收敛速度慢的。
算法拓展
针对标准PSO的缺点,通常有如下的改进:
- 实现参数的自适应变化。
- 引入一些其他机制。比如随机的因素,速度、位置的边界变化-后期压缩最大速度等。
- 结合其他智能优化算法:遗传算法、免疫算法、模拟退火算法等等,帮助粒子跳出局部最优,改善收敛速度。
matlab代码
二维下
%% 初始化种群
clear
%% Sphere
clear
f= @(x) x .* sin(x) .* cos(2 * x) - 2 * x .* sin(3 * x) +3 * x .* sin(4 * x); % 函数表达式 % 求这个函数的最大值 N = 20; % 初始种群个数
d = 1; % 可行解维数
ger = 100; % 最大迭代次数
limit = [0, 50]; % 设置位置参数限制
vlimit = [-10, 10]; % 设置速度限制
w = 0.8; % 惯性权重
c1 = 0.5; % 自我学习因子
c2 = 0.5; % 群体学习因子
figure(1);ezplot(f,[0,0.01,limit(2)]); %曲线x = limit(1) + ( limit( 2 ) - limit( 1) ) .* rand(N, d);%初始种群的位置v = rand(N, d); % 初始种群的速度
xm = x; % 每个个体的历史最佳位置
ym = zeros(1, d); % 种群的历史最佳位置
fxm = ones(N, 1)*inf; % 每个个体的历史最佳适应度
fym = inf; % 种群历史最佳适应度
hold on
plot(xm, f(xm), 'ro');title('初始状态图');
figure(2)
%% 群体更新
iter = 1;
% record = zeros(ger, 1); % 记录器
while iter <= ger fx = f(x) ; % 个体当前适应度 for i = 1:N if fx(i) <fxm(i) fxm(i) = fx(i); % 更新个体历史最佳适应度 xm(i,:) = x(i,:); % 更新个体历史最佳位置(取值第i行的所有列) end end if min(fxm) < fym [fym, nmin] = min(fxm); % 更新群体历史最佳适应度 ym = xm(nmin, :); % 更新群体历史最佳位置 end v = v * w + c1 * rand * (xm - x) + c2 * rand * (repmat(ym, N, 1) - x);% 速度更新 % 边界速度处理 v(v > vlimit(2)) = vlimit(2); %可以根据括号中的条件决定是否赋值v(v < vlimit(1)) = vlimit(1); x = x + v;% 位置更新 % 边界位置处理 x(x > limit(2)) = limit(2); x(x < limit(1)) = limit(1); record(iter) = fym;%最大值记录 x0 = 0 : 0.01 : limit(2); %1行3列的数组subplot(1,2,1)plot(x0, f(x0), 'b-', x, f(x), 'ro');title('状态位置变化')subplot(1,2,2);plot(record);title('最优适应度进化过程') pause(0.01) iter = iter+1; end x0 = 0 : 0.01 : limit(2);
figure(4);plot(x0, f(x0), 'b-', x, f(x), 'ro');title('最终状态位置')
disp(['最大值:',num2str(fym)]);
disp(['变量取值:',num2str(ym)]);


三维下
%% 初始化种群
clear
clc
f = @(x,y) 20 + x.^2 + y.^2 - 10*cos(2*pi.*x) - 10*cos(2*pi.*y) ;%[-5.12 ,5.12 ]x0 = [-5.12:0.05:5.12];
y0 = x0 ;
[X,Y] = meshgrid(x0,y0);
Z =f(X,Y) ;
figure(1); mesh(X,Y,Z);
colormap(parula(5));N = 50; % 初始种群个数
d = 2; % 可行解维数
ger = 100; % 最大迭代次数
limit = [-5.12,5.12]; % 设置位置参数限制
vlimit = [-.5, .5]; % 设置速度限制
w = 0.8; % 惯性权重
c1 = 0.5; % 自我学习因子
c2 = 0.5; % 群体学习因子 x = limit(1) + ( limit( 2 ) - limit( 1) ) .* rand(N, d);%初始种群的位置 v = rand(N, d); % 初始种群的速度
xm = x; % 每个个体的历史最佳位置
ym = zeros(1, d); % 种群的历史最佳位置
fxm = ones(N, 1)*inf; % 每个个体的历史最佳适应度
fym = inf; % 种群历史最佳适应度
% record = zeros(ger,1);
hold on
% [X,Y] = meshgrid(x(:,1),x(:,2));
% Z = f( X,Y ) ;
scatter3( x(:,1),x(:,2) ,f( x(:,1),x(:,2) ),'r*' );
figure(2)
record=[];%% 群体更新
iter = 1;
% record = zeros(ger, 1); % 记录器
while iter <= ger fx = f( x(:,1),x(:,2) ) ;% 个体当前适应度 for i = 1:N if fx(i) <fxm(i) fxm(i) = fx(i); % 更新个体历史最佳适应度 xm(i,:) = x(i,:); % 更新个体历史最佳位置(取值) end end if min(fxm)< fym[fym, nmin] = min(fxm); % 更新群体历史最佳适应度 ym = xm(nmin, :); % 更新群体历史最佳位置 end v = v * w + c1 * rand * (xm - x) + c2 * rand * (repmat(ym, N, 1) - x);% 速度更新 % 边界速度处理 v(v > vlimit(2)) = vlimit(2); v(v < vlimit(1)) = vlimit(1); x = x + v;% 位置更新 % 边界位置处理 x(x > limit(2)) = limit(2); x(x < limit(1)) = limit(1); record(iter) = fym;%最大值记录 subplot(1,2,1)mesh(X,Y,Z)hold on scatter3( x(:,1),x(:,2) ,f( x(:,1),x(:,2) ) ,'r*');title(['状态位置变化','-迭代次数:',num2str(iter)])subplot(1,2,2);plot(record);title('最优适应度进化过程') pause(0.01) iter = iter+1; end figure(4);mesh(X,Y,Z); hold on
scatter3( x(:,1),x(:,2) ,f( x(:,1),x(:,2) ) ,'r*');title('最终状态位置')
disp(['最优值:',num2str(fym)]);
disp(['变量取值:',num2str(ym)]); 


python代码
import numpy as np
import matplotlib.pyplot as plt
# 粒子(鸟)
class particle:def __init__(self):self.pos = 0 # 粒子当前位置self.speed = 0self.pbest = 0 # 粒子历史最好位置class PSO:def __init__(self):self.w = 0.5 # 惯性因子self.c1 = 1 # 自我认知学习因子self.c2 = 1 # 社会认知学习因子self.gbest = 0 # 种群当前最好位置self.N = 20 # 种群中粒子数量self.POP = [] # 种群self.iter_N = 100 # 迭代次数# 适应度值计算函数def fitness(self, x):return x + 16 * np.sin(5 * x) + 10 * np.cos(4 * x)# 找到全局最优解def g_best(self, pop):for bird in pop:if bird.fitness > self.fitness(self.gbest):self.gbest = bird.pos# 初始化种群def initPopulation(self, pop, N):for i in range(N):bird = particle()#初始化鸟bird.pos = np.random.uniform(-10, 10)#均匀分布bird.fitness = self.fitness(bird.pos)bird.pbest = bird.fitnesspop.append(bird)# 找到种群中的最优位置self.g_best(pop)# 更新速度和位置def update(self, pop):for bird in pop:# 速度更新speed = self.w * bird.speed + self.c1 * np.random.random() * (bird.pbest - bird.pos) + self.c2 * np.random.random() * (self.gbest - bird.pos)# 位置更新pos = bird.pos + speedif -10 < pos < 10: # 必须在搜索空间内bird.pos = posbird.speed = speed# 更新适应度bird.fitness = self.fitness(bird.pos)# 是否需要更新本粒子历史最好位置if bird.fitness > self.fitness(bird.pbest):bird.pbest = bird.pos# 最终执行def implement(self):# 初始化种群self.initPopulation(self.POP, self.N)# 迭代for i in range(self.iter_N):# 更新速度和位置self.update(self.POP)# 更新种群中最好位置self.g_best(self.POP)pso = PSO()
pso.implement()best_x=0
best_y=0
for ind in pso.POP:#print("x=", ind.pos, "f(x)=", ind.fitness)if ind.fitness>best_y:best_y=ind.fitnessbest_x=ind.pos
print(best_y)
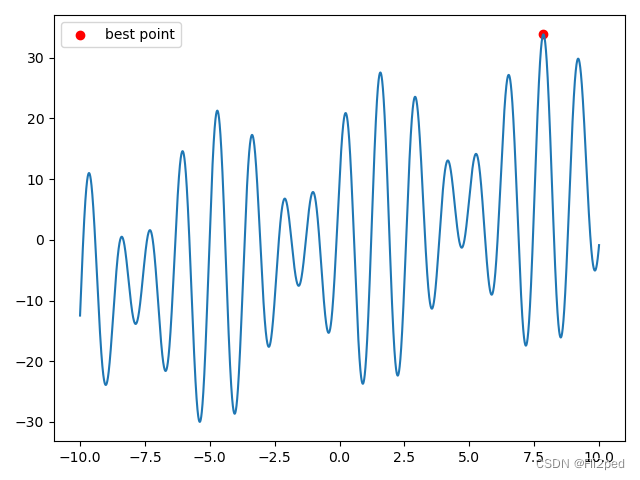
print(best_x)x = np.linspace(-10, 10, 100000)def fun(x):return x + 16 * np.sin(5 * x) + 10 * np.cos(4 * x)
y=fun(x)
plt.plot(x, y)plt.scatter(best_x,best_y,c='r',label='best point')
plt.legend()
plt.show()
注:
算法思想和matlab代码来自于
【通俗易懂讲算法-最优化之粒子群优化(PSO)】
python代码来自于
粒子群PSO优化算法学习笔记 及其python实现(附讲解如何使用python语言sko.PSO工具包)