基础实验篇 | uORB消息读写与自定义实验(二)
导读
uORB是PX4/Pixhawk系统中非常重要且关键的模块之一,是用于无人机模块间通信的协议机制。本篇将详细介绍uORB并详细拆解uORB消息读写与自定义实验全流程(二)。
基础实验篇 | uORB消息读写与自定义实验(二)
01
RflySim平台的uORB消息读写功能
PX4的uORB消息系统是提供了非常强大且方便的内部模块间数据交互能力,所有模块都可以将数据放在消息池中,其他模块可以从消息池订阅到所需数据。但uORB消息读、写以及自定义消息的开发过程如前期例程所示较为繁琐。
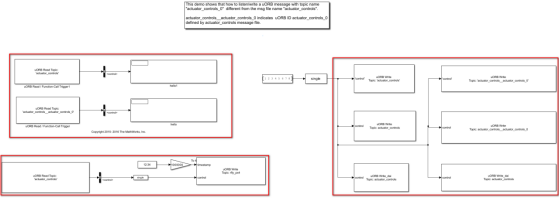
RflySim平台基于MATLAB/Simulink软件开发了Pixhawk Target Block工具箱,该工具箱中的uORB Read and Write中提供了丰富的uORB消息读取、写入及自定义消息的模块;其中主要的模型介绍如下:
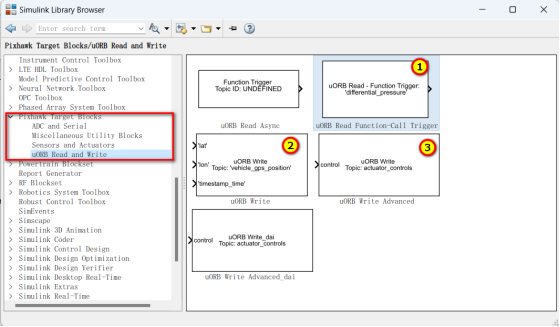
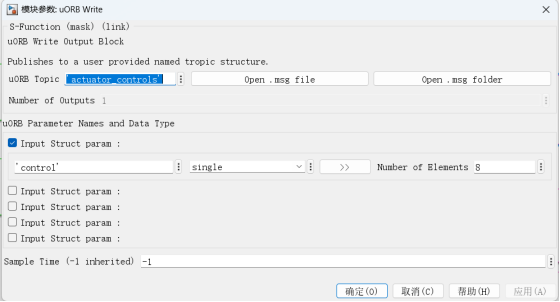
在Simulink中使用这三个接口,其参数配置包括消息类型、话题名称和消息数据。消息类型是指要写入的消息的类型,可以在PX4源代码中的“msg”目录下找到相应的消息类型定义文件。话题名称是指要写入的消息所对应的话题名称,可以在PX4源代码中的“topics”目录下找到相应的话题定义文件。uORB消息栏选择如下格式:中间双下划线“__”是分隔线,分割线前表示uORB消息的文件名,分割线后表示uORB的消息ID。actuator_controls__actuator_controls_0上述格式表示消息文件为actuator_controls.msg,消息ID为actuator_controls_0,且在同一个主消息下可以自定义多个不同的消息ID。消息数据是指要写入的实际数据,可以在Simulink模型中的其他模块中生成。注:以上三个模块只能在PX4飞控系统中使用,因此在使用之前需要确保已经正确地配置了PX4的开发环境,并且已经将Simulink模型成功地部署到PX4上;且在使用“uORB Read Function-Call Trigger”模块前,需要先在PX4中定义相应的uORB消息。
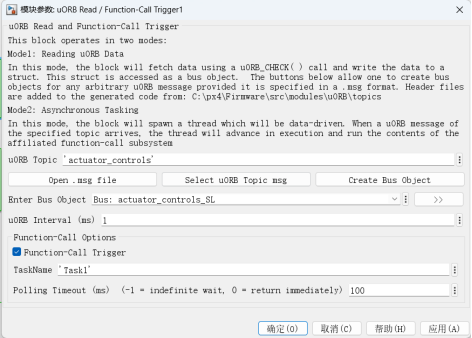
①:uORB消息数据监听接口模块。该接口可以通过调用外部函数的形式响应接收到的新消息。在Simulink中使用uORB Read Function-Call Trigger接口,可以通过回调函数(本例程未使用)来处理新消息。
②:uORB消息数据发布接口模块。该接口允许用户向uORB话题发布指定的值或结构体。
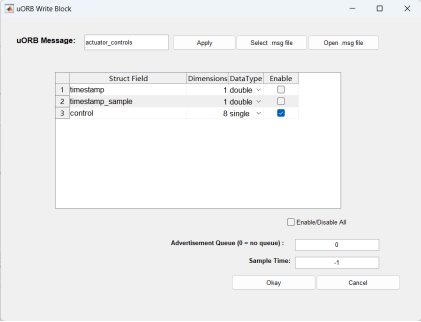
③:uORB消息数据发布接口高级模块。该接口可允许用户对其发布的数据进行更灵活的控制。在Simulink中使用uORB Write Advanced接口,可以实现更加复杂和精确的消息发布方式。可选择要写入的消息文件和一个消息ID。此外,还可以设置消息的优先级、队列大小等高级选项。
02
基于RflySim平台的uORB消息读写实验
基于RflySim提供的丰富的uORB消息读、写接口,可用于控制器设计、飞控内部数据监听等方面的实验开发中,本次实验整体框架图如下所示:
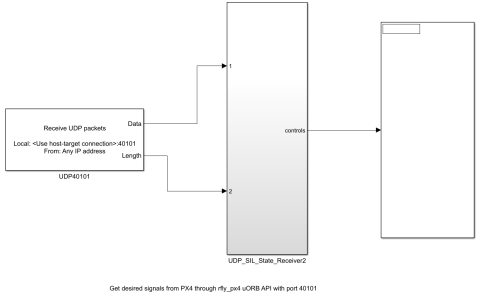
同时,RflySim平台提供rfly_px4这一uORB消息来向外发送数据(向40100系列端口发送特定数据)。本实验中,通过rfly_px4消息将从飞控内部读取到的消息转发之后,在进行硬件在环仿真时,即可在Simulink中监听这一消息。Simulink监听uORB消息demo如下:
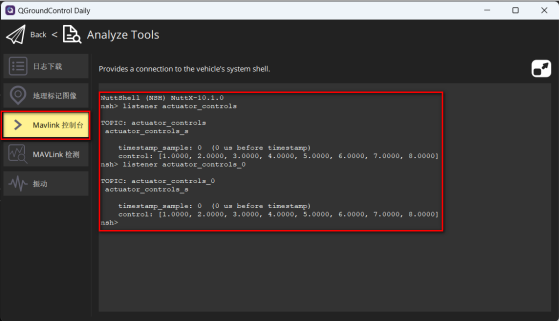
将uORB消息读写demo文件通过自动代码生成的方式烧录到飞控中之后,打开QGC的Anslyze Tools->MAVLINK 控制台中,输入listener actuator_controls、listener actuator_controls_0即可看到本例程的运行效果如下:
在进行硬件在环仿真时,打开Simulink监听程序,点击运行即可监听到写入的uORB消息,如下图所示:

参考资料
[1]. https://doc.rflysim.com/