STM32——从点灯到传感器控制
STM32基础外设开发:从点灯到传感器控制
一、前言
本篇文章总结STM32F10x系列基础外设开发实例,涵盖GPIO控制、按键检测、传感器应用等。所有代码基于标准库开发,适合STM32初学者参考。
二、硬件准备
- STM32F10x系列开发板
- LED模块
- 有源蜂鸣器
- 光敏电阻模块
- 按键模块
三、基础GPIO控制
1. 点灯实验
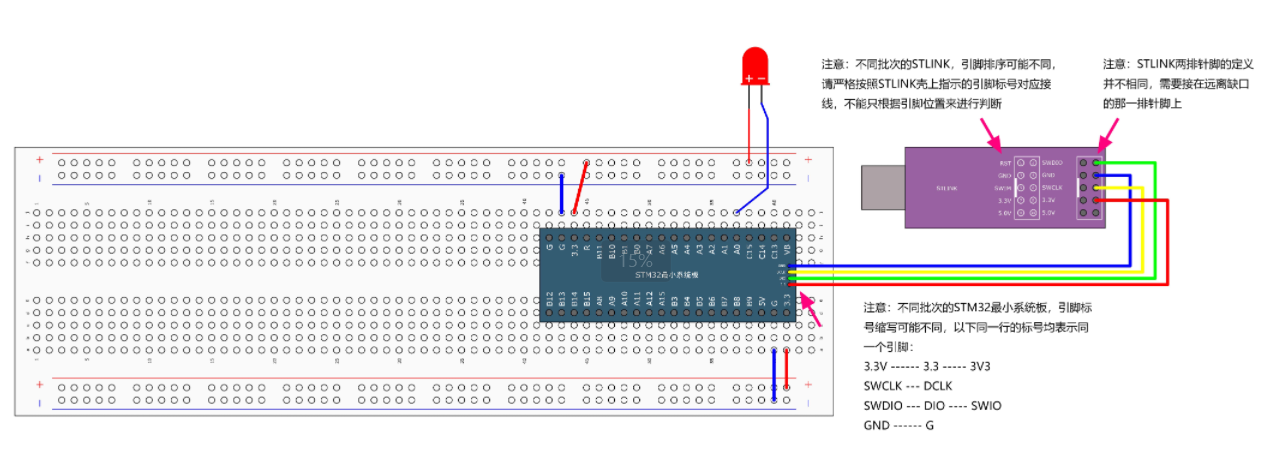
// 核心代码片段
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);while(1) {GPIO_WriteBit(GPIOA, GPIO_Pin_0, Bit_RESET);Delay_ms(500);GPIO_WriteBit(GPIOA, GPIO_Pin_0, Bit_SET);Delay_ms(500);
}
关键点:
必须开启对应GPIO时钟 :选择你面包板插入对应的端口
推挽输出模式适合驱动LED
使用Delay函数实现定时控制
#include "stm32f10x.h"/*** @brief 微秒级延时* @param xus 延时时长,范围:0~233015* @retval 无*/
void Delay_us(uint32_t xus)
{SysTick->LOAD = 72 * xus; //设置定时器重装值SysTick->VAL = 0x00; //清空当前计数值SysTick->CTRL = 0x00000005; //设置时钟源为HCLK,启动定时器while(!(SysTick->CTRL & 0x00010000)); //等待计数到0SysTick->CTRL = 0x00000004; //关闭定时器
}/*** @brief 毫秒级延时* @param xms 延时时长,范围:0~4294967295* @retval 无*/
void Delay_ms(uint32_t xms)
{while(xms--){Delay_us(1000);}
}/*** @brief 秒级延时* @param xs 延时时长,范围:0~4294967295* @retval 无*/
void Delay_s(uint32_t xs)
{while(xs--){Delay_ms(1000);}
}
2. 流水灯实验
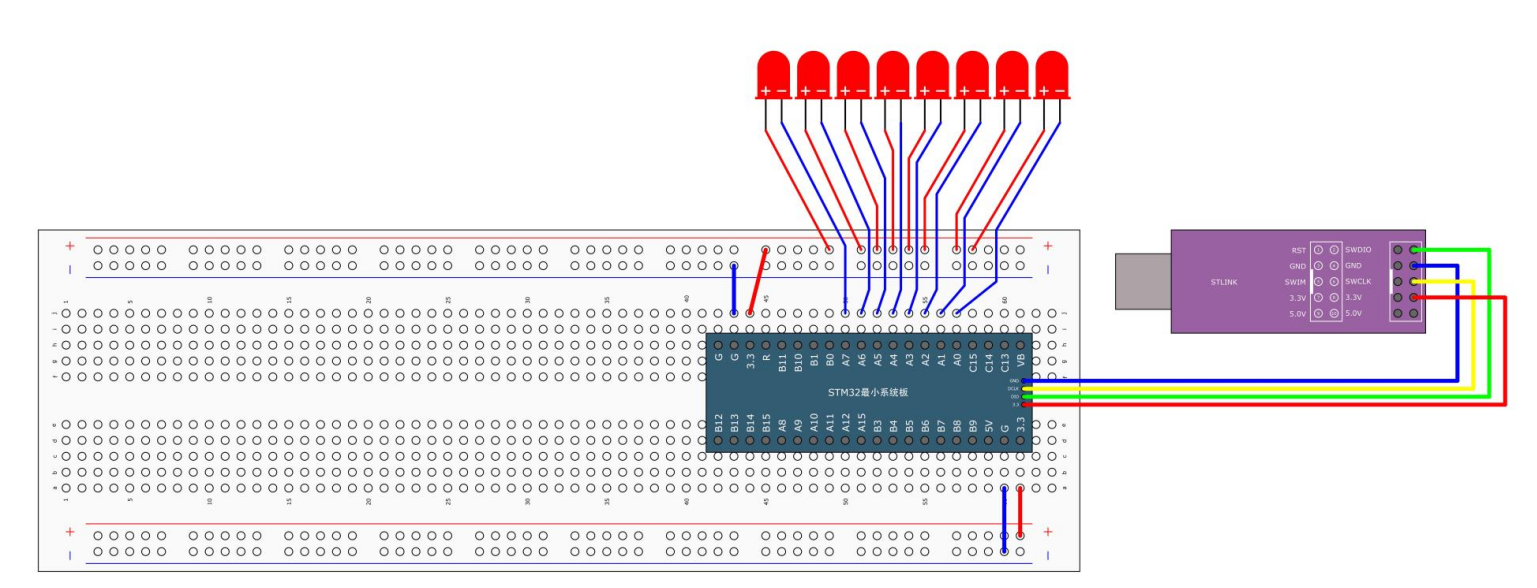
#include "stm32f10x.h" // Device header
#include "Delay.h"int main(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_All;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);while (1){GPIO_Write(GPIOA, ~0x0001); //0000 0000 0000 0001Delay_ms(100);GPIO_Write(GPIOA, ~0x0002); //0000 0000 0000 0010Delay_ms(100);GPIO_Write(GPIOA, ~0x0004); //0000 0000 0000 0100Delay_ms(100);GPIO_Write(GPIOA, ~0x0008); //0000 0000 0000 1000Delay_ms(100);GPIO_Write(GPIOA, ~0x0010); //0000 0000 0001 0000Delay_ms(100);GPIO_Write(GPIOA, ~0x0020); //0000 0000 0010 0000Delay_ms(100);GPIO_Write(GPIOA, ~0x0040); //0000 0000 0100 0000Delay_ms(100);GPIO_Write(GPIOA, ~0x0080); //0000 0000 1000 0000Delay_ms(100);}
}/*优化
void LED_Flow() {uint16_t ledPins = 0x0001; // 从PA0开始while (1) {GPIO_Write(GPIOA, ~ledPins); // 取反实现低电平点亮Delay_ms(200);ledPins <<= 1; // 左移切换LEDif (ledPins > 0x0080) { // 到PA7后重置ledPins = 0x0001;}}
}*/
3.蜂鸣器
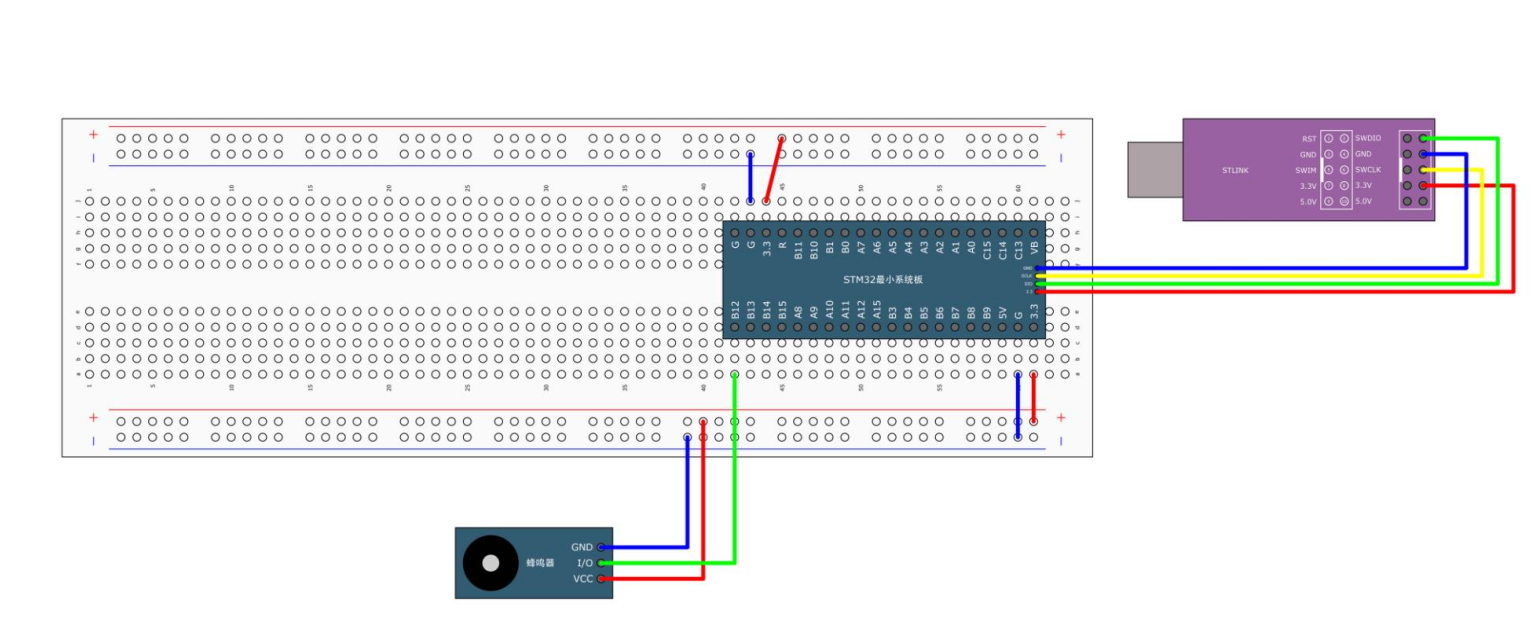
#include "stm32f10x.h" // Device header
#include "Delay.h"int main(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure);while (1){GPIO_ResetBits(GPIOB, GPIO_Pin_12);Delay_ms(100);GPIO_SetBits(GPIOB, GPIO_Pin_12);Delay_ms(100);GPIO_ResetBits(GPIOB, GPIO_Pin_12);Delay_ms(100);GPIO_SetBits(GPIOB, GPIO_Pin_12);Delay_ms(700);}
}
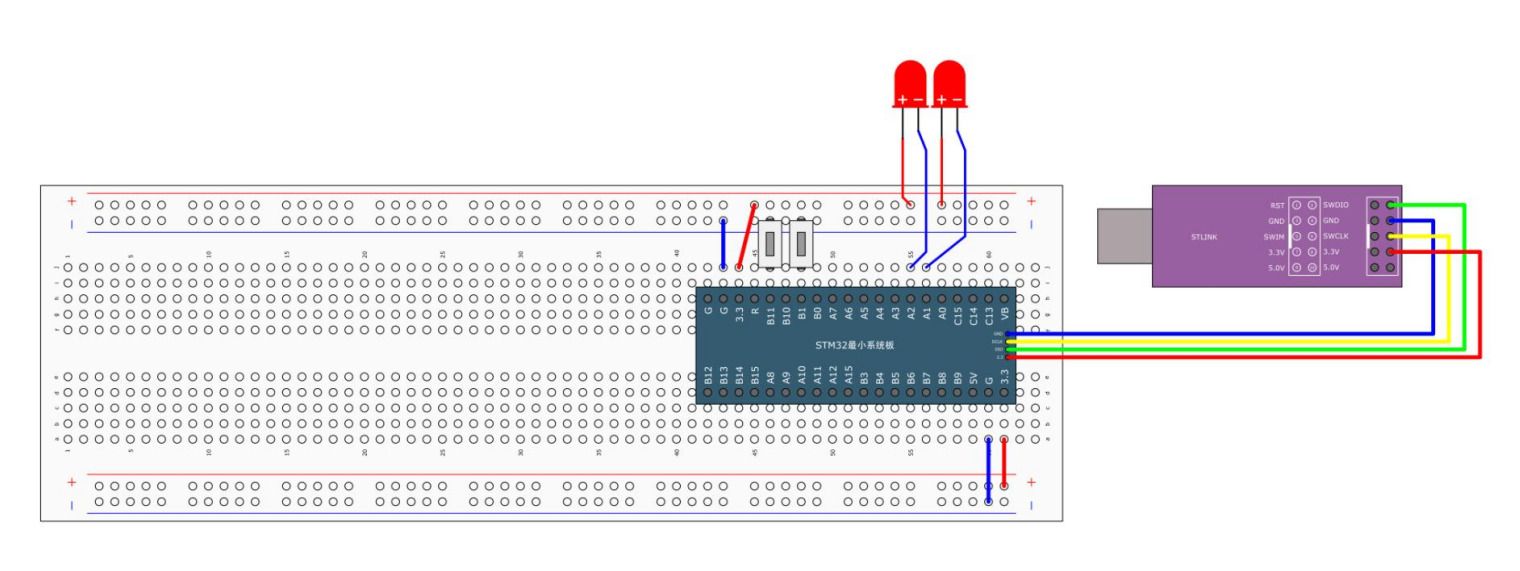
4.按键控制LED
-
初始化LED,然后创建函数来控制了LED的亮灭,创建函数实现亮灭的翻转:当按下按键,读取led状态,高电平时是灭,然后然下按键,实现翻转,变亮
LED实现函数
#include "stm32f10x.h" // Device headervoid LED_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1 | GPIO_Pin_2;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);GPIO_SetBits(GPIOA, GPIO_Pin_1 | GPIO_Pin_2);
}void LED1_ON(void)
{GPIO_ResetBits(GPIOA, GPIO_Pin_1);
}void LED1_OFF(void)
{GPIO_SetBits(GPIOA, GPIO_Pin_1);
}void LED1_Turn(void)
{if (GPIO_ReadOutputDataBit(GPIOA, GPIO_Pin_1) == 0){GPIO_SetBits(GPIOA, GPIO_Pin_1);}else{GPIO_ResetBits(GPIOA, GPIO_Pin_1);}
}void LED2_ON(void)
{GPIO_ResetBits(GPIOA, GPIO_Pin_2);
}void LED2_OFF(void)
{GPIO_SetBits(GPIOA, GPIO_Pin_2);
}void LED2_Turn(void)
{if (GPIO_ReadOutputDataBit(GPIOA, GPIO_Pin_2) == 0){GPIO_SetBits(GPIOA, GPIO_Pin_2);}else{GPIO_ResetBits(GPIOA, GPIO_Pin_2);}
}
初始化按键,然后创建函数来读取按下按键的返回值
#include "stm32f10x.h" // Device header
#include "Delay.h"void Key_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//上拉输入,默认高电平GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1 | GPIO_Pin_11;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure);
}uint8_t Key_GetNum(void)
{uint8_t KeyNum = 0;if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0) //按下按键,低电平{Delay_ms(20);//延时消抖while (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0);//如果不松开,循环卡住Delay_ms(20);//松开消抖KeyNum = 1;//控制led1,赋值}if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_11) == 0){Delay_ms(20);while (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_11) == 0);Delay_ms(20);KeyNum = 2;控制led2,赋值}return KeyNum;
}测试文件
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "LED.h"
#include "Key.h"uint8_t KeyNum;int main(void)
{LED_Init();Key_Init();while (1){KeyNum = Key_GetNum();if (KeyNum == 1){LED1_Turn();}if (KeyNum == 2){LED2_Turn();}}
}输入模式选择:
上拉输入(IPU):默认高电平,按键接地时触发低电平。
下拉输入(IPD):默认低电平,按键接VCC时触发高电平。
5.光明电阻控制LED(光线暗电阻高,高电平;反之低电平)
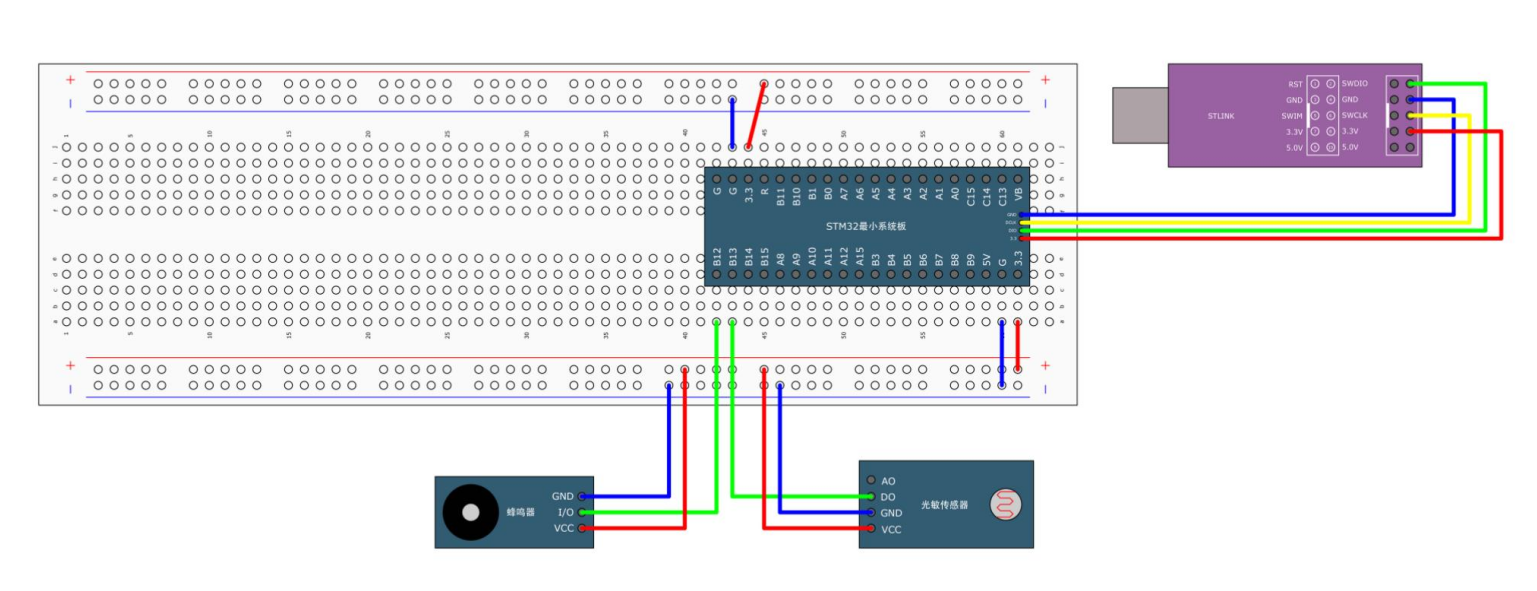
-
创建各自的实现文件,进行初始化操作,然后对蜂鸣器进行开关的操作实现(低电平响,高电平不响),然后光明电阻直接返回读出的输出值
蜂鸣器
#include "stm32f10x.h" // Device headervoid Buzzer_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure);GPIO_SetBits(GPIOB, GPIO_Pin_12);
}void Buzzer_ON(void)
{GPIO_ResetBits(GPIOB, GPIO_Pin_12);
}void Buzzer_OFF(void)
{GPIO_SetBits(GPIOB, GPIO_Pin_12);
}void Buzzer_Turn(void)
{if (GPIO_ReadOutputDataBit(GPIOB, GPIO_Pin_12) == 0){GPIO_SetBits(GPIOB, GPIO_Pin_12);}else{GPIO_ResetBits(GPIOB, GPIO_Pin_12);}
}光明电阻
#include "stm32f10x.h" // Device headervoid LightSensor_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure);
}uint8_t LightSensor_Get(void)
{return GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_13);
}测试文件
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "Buzzer.h"
#include "LightSensor.h"int main(void)
{Buzzer_Init();LightSensor_Init();while (1){if (LightSensor_Get() == 1){Buzzer_ON();}else{Buzzer_OFF();}}
}