C++ GDAL找出多时相遥感影像缺失的日期并自动生成新的全零图像作为替补
本文介绍基于C++ 语言的GDAL库,基于一个存储大量遥感影像的文件夹,依据每一景遥感影像的文件名中表示日期的那个字段,找出这些遥感影像中缺失的成像日期,并新生成多个像元值全部为0的栅格文件,作为这些缺失日期当日的遥感影像文件的方法。
首先,我们来看一下本文需要实现的需求。现在有一个文件夹,存储了从2018年第001天到2022年第361天的全部遥感影像,其中每一景图像的像元个数、空间参考信息、NoData值等都是一致的。对于这些遥感影像,原本应该是每10天就有1景;但是由于遥感影像数据有缺失,因此部分日期没有对应的遥感影像。如下图所示,可以看到比如2018年的061这一天,它就没有对应的遥感影像。
但是,由于后期处理的需要,我们现在希望对这些缺失日期的遥感影像文件加以填补——具体的需求是,我们新建若干个像元值全部为0的栅格文件,作为每一个缺失日期当日的遥感影像文件;这些填补的、新的遥感影像文件的各项信息(比如像元个数、空间参考信息等)都和原本的文件一致即可,只要保证全部的像元都是0就行。
知道了需求,我们就可以开始代码的撰写。本文用到的代码具体如下所示。其中,关于C++ 语言配置GDAL库的方法,大家可以参考文章Visual Studio配置并编译C++环境下GDAL库、SQLite环境与PROJ库的方法(https://blog.csdn.net/zhebushibiaoshifu/article/details/127088090)。
#include <iostream>
#include <iomanip>
#include <sstream>
#include "gdal_priv.h"
#include "cpl_conv.h"using namespace std;void create_missing_raster(string path);int main() {string file_path = R"(E:\02_Project\TIFF\TEST)";create_missing_raster(file_path);return 0;
}void create_missing_raster(string path)
{vector<string> all_file_path;for (int year = 2018; year <= 2022; year++){for (int day = 1; day <= 361; day += 10){ostringstream oss;oss << path << "/Albers_MuSyQ.NDVI.16m." << to_string(year) << setfill('0') << setw(3) << to_string(day) << "000000.49SDB.001.h5NDVI-NDVI.tif";all_file_path.push_back(oss.str());}}GDALAllRegister();int x_size, y_size;string one_actual_path;for (string& one_file_path : all_file_path){GDALDataset* poDataset_actual;poDataset_actual = (GDALDataset*)GDALOpen(one_file_path.c_str(), GA_ReadOnly);if (poDataset_actual != NULL){one_actual_path = one_file_path;x_size = poDataset_actual->GetRasterXSize();y_size = poDataset_actual->GetRasterYSize();GDALClose((GDALDatasetH)poDataset_actual);break;}}for (string& one_file_path : all_file_path){if (CPLCheckForFile((char*)one_file_path.c_str(), NULL) == FALSE){GDALDataset* poDataset;GDALDriver* poDriver;poDriver = GetGDALDriverManager()->GetDriverByName("GTiff");GDALDataset* poDataset_actual;poDataset_actual = (GDALDataset*)GDALOpen(one_actual_path.c_str(), GA_ReadOnly);poDataset = poDriver->CreateCopy(one_file_path.c_str(), poDataset_actual, FALSE, NULL, NULL, NULL);double* pafScanline = new double[x_size * y_size];for (int i = 0; i < x_size * y_size; i++){pafScanline[i] = 0.0;}GDALRasterBand* poBand;poBand = poDataset->GetRasterBand(1);poBand->RasterIO(GF_Write, 0, 0, x_size, y_size, pafScanline, x_size, y_size, GDT_Float64, 0, 0);delete[] pafScanline;GDALClose((GDALDatasetH)poDataset);GDALClose((GDALDatasetH)poDataset_actual);cout << "New file is :" << one_file_path << endl;}}GDALDestroyDriverManager();
}
上述代码主要都是在create_missing_raster(string path)函数内实现具体功能的,我们主要就对这一函数加以讲解。
首先,我们需要基于文件夹中遥感影像文件的文件名称特征,遍历生成文件名列表。在这里,我们使用两个嵌套的for循环,生成所有可能的栅格图像文件名,并将这些文件名保存在all_file_path向量中。其中,栅格图像的文件名根据年份和天数生成,并通过setfill('0')与setw(3)这两个函数保证我们生成的日期满足YYYYDDD这种格式。
随后,基于GDALAllRegister这一GDAL库的初始化函数,用于注册所有支持的数据格式驱动程序。接下来,我们使用GDALOpen函数,从2018001这一天开始,通过循环打开对应名字的文件,直到找到文件夹中第一个实际存在的栅格图像文件(poDataset_actual),并获取其栅格图像的行列数(x_size和y_size);我们后期的操作需要用到这个行列数,并且会将这个实际存在的栅格文件作为生成新的栅格文件的模板。
接下来,我们遍历文件名列表all_file_path,对每个文件名进行处理。对于不存在的栅格图像文件,使用GDALDriver创建一个新的数据集(poDataset),并将其中的像元值设置为0。如果栅格图像文件已经存在,则跳过不处理。其中,在对缺失的栅格图像加以生成时,我们首先使用GetGDALDriverManager()->GetDriverByName函数获取GDAL驱动程序对象,然后使用CreateCopy函数创建新的栅格图像;其中,我们就是以前期找到的文件夹中第一个实际存在的栅格图像文件one_actual_path为模板。随后,我们用0填充新创建的栅格图像,并使用RasterIO函数对栅格图像的像元进行写入操作。
最后,在上述处理完成后,使用GDALClose函数关闭数据集,并输出新创建的栅格图像的文件名。随后,我们使用GDALDestroyDriverManager销毁GDAL驱动程序管理器,释放资源。
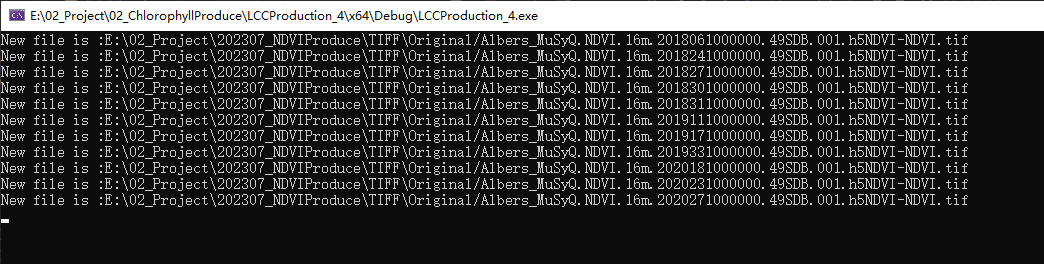
随后,我们运行代码,可以看到每一个新生成的栅格图像文件(也就是原本当日没有成像的日期对应的遥感影像)都会打印出来。
随后,我们打开文件夹,可以看到之前没有遥感影像的日期,目前也都存在一景遥感影像与其对应了。比如2018年的061这一天,目前已经有了一景遥感影像。
至此,大功告成。
欢迎关注:疯狂学习GIS