工业的相机与镜头(简单选型)
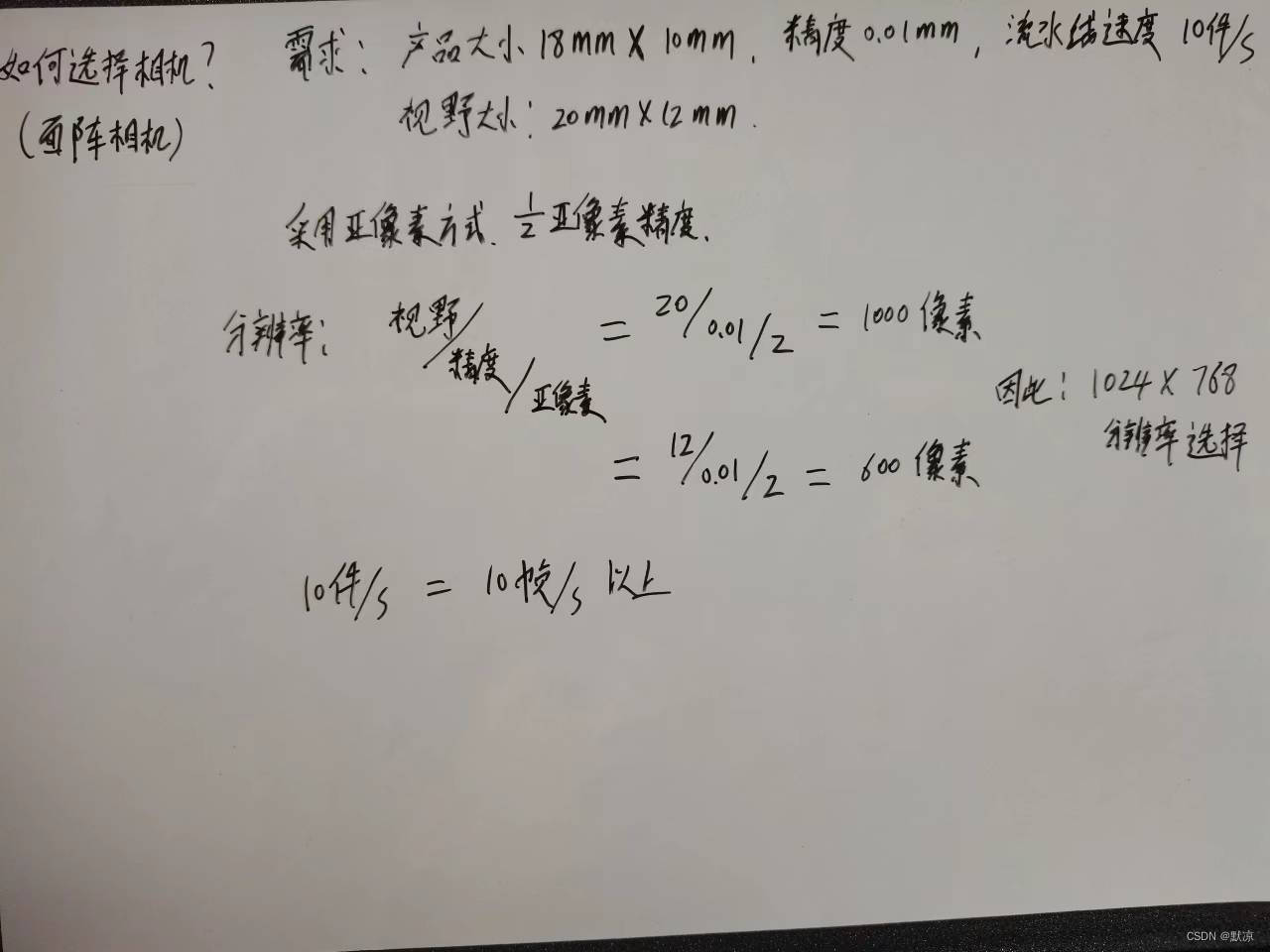
面阵相机,需要多大的分辨率?多少帧数?
前提条件:
1.被检测的物体大小
2.要求检测的精度是多少
3.物体是否在运动过程中进行检测,速度是多少
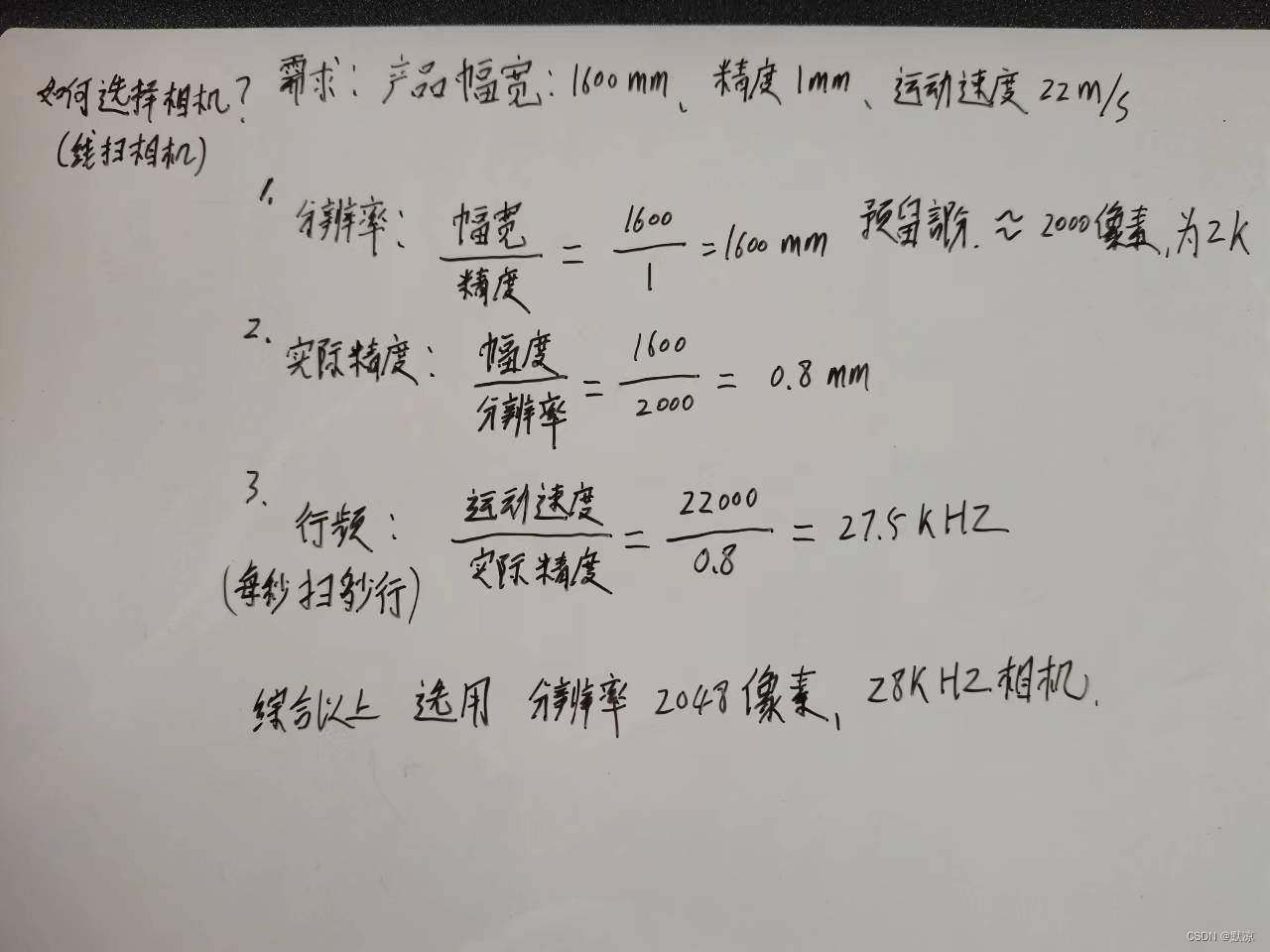
线阵相机选择(分辨率、扫描行数)
行频:每秒扫描多少行,单位: 1KHZ = 1000HZ
前提条件:
1.幅宽:相机检测的宽度
2.精度:需要检测的最小精度
3.运动速度:被检测物体运动的速度
分辨率 = 幅宽 / 精度
实际检测精度 = 幅宽 / 选定的分辨率
扫描行数 = 运动速度 / 实际检测精度
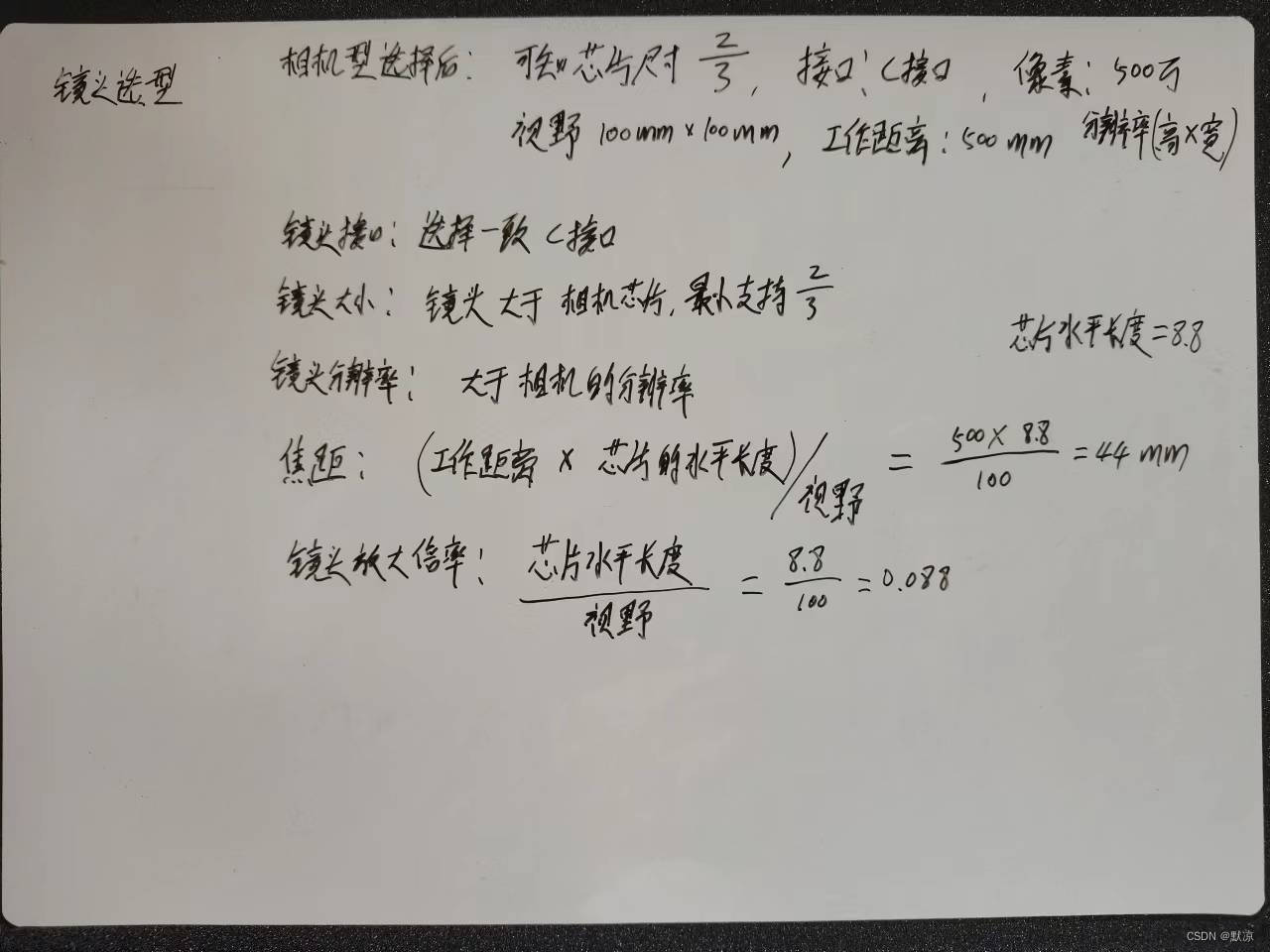
镜头选型
接口类型:F类型、C类型、CS类型
焦距 > 25mm 选用 F类型
焦距 < 25mm 选用 C类型、CS类型
注意:CS镜头与C型镜头无法配合使用
远心镜头:
特点:不可调节焦距,消除畸变,放大倍率不可变
远心镜头类型 :物方远心、像方远心、双侧远心、
前提条件:选好相机
1.相机芯片尺寸
2.接口是什么?C?F?CS?
3.相机分辨率
4.视野
5.工作距离