大象机器人人工智能套装2023版深度学习协作机器人、先进机器视觉与应用场景
引言:
介绍当前的版本
今天我们要介绍的是aikit2023,aikit2023是aikit的全新升级版。
AIkit 2023 是一套集视觉,定位抓取、自动分拣模块为一体的入门级人工智能套装。
该套装基于python平台,可通过开发软件实现机械臂的控制,简单易学,能够快速入门学习人工智能基础知识,启发创新思维,领悟开源创意文化。

人工智能套装2023是机械臂应用的一种场景,仿工业场景。在这个仿工业场景中,机械臂将代替人工实现智能分拣,初步实现工业自动化。在这个场景中最为核心的是五个视觉算法和机械臂运动控制算法,能够快速的识别物体,进行精准分拣。
五个视觉算法分别是:
● 形状识别算法● 特征点识别算法● 二维码识别算法● 颜色识别算法● YOLOv5识别算法
OpenCV是一个开源的计算机视觉库,用于计算机图像处理、计算机视觉和机器学习领域。OpenCV支持多种编程语言,包括C++、Python等,提供了大量的图像处理和计算机视觉函数,帮助开发人员实现各种应用,比如图像识别、目标跟踪、机器人导航等。
前四种算法是根据OpenCV算法来进行图像处理和机器视觉,其中有对色域的识别,特征点的识别,二维码的识别还有形状的识别。
YoloV5 (You Only Look Once version 5)是近年来比较热门的一种目标检测算法,v5代表了它的版本号(第五个版本),它使用了卷积神经网络(CNN)来预测图像中的物体,并且能够较快地完成检测,同时仍保持较高的准确性。
接下来我们分别来看看它工作的状态是怎样的

形状识别算法

特征点识别
颜色识别
二维码识别
yolov5 识别
接下来我们介绍一下如何使用
如何使用
环境
人工智能套装2023的程序是基于python编写的一套程序。
在使用my系列以M5Stack为核心主控的机械臂,在使用的时候电脑需要安装python的编译环境,已经openCV等一些相对应的python库,例如:myCobot 280 M5Stack,mechArm 270 M5Stack,myPalletizer 260 M5Stack。
在使用以树莓派为核心控制的机械臂,不用安装环境,开机就可以使用了,例如myCobot 280 Pi,mechArm 270 Pi,myPalletizer 260 Pi
aikit 2023使用的程序需要从Github上下载。
https://github.com/elephantrobotics/AiKit_UI
代码中截取的一部分
让我们来启动程序吧!
使用过程
启动main.py
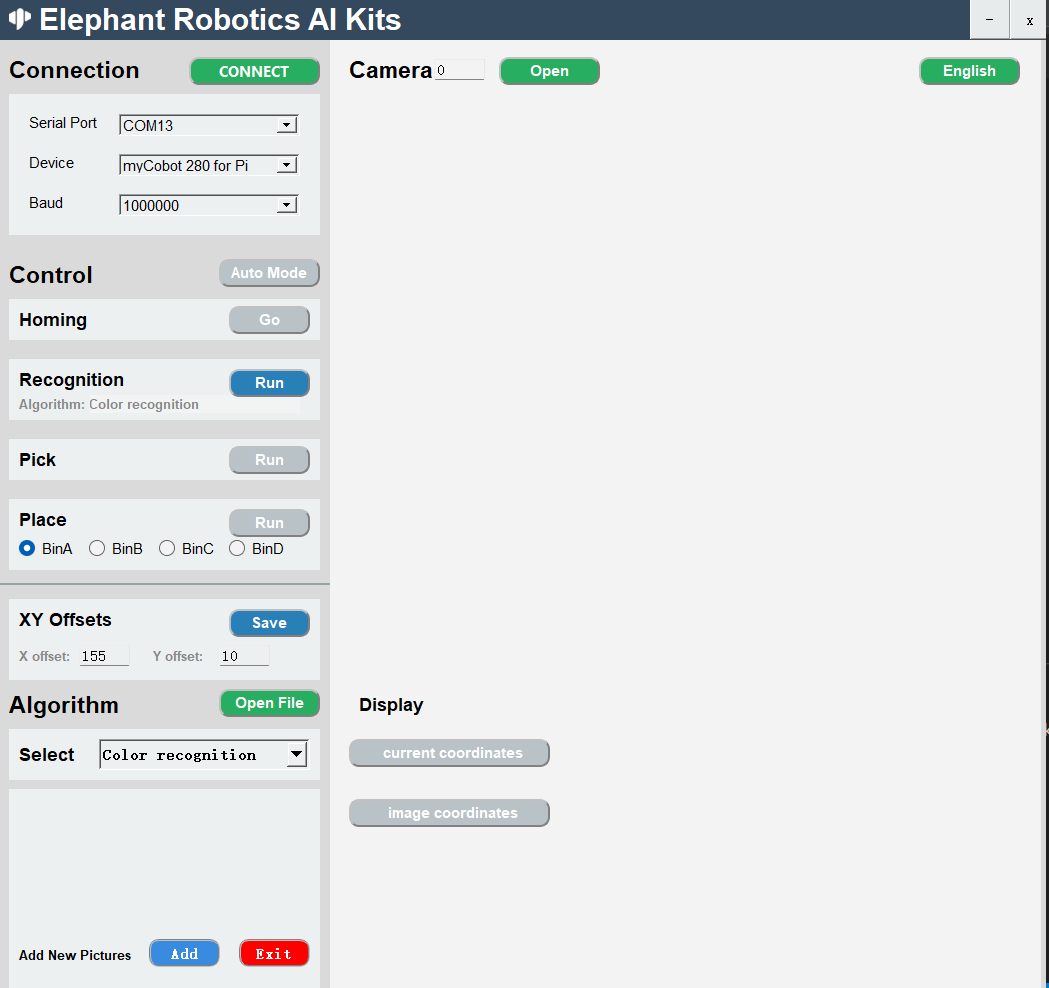
这个是启动之后的可视化程序界面

选择机械臂的型号,串口号还有波特率进行连接
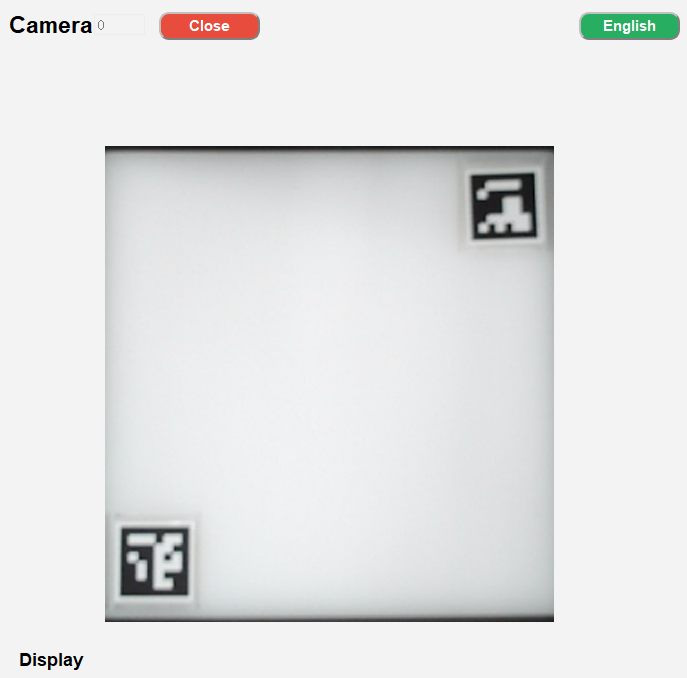
显示摄像头下的画面,来实现机器视觉的相关算法。
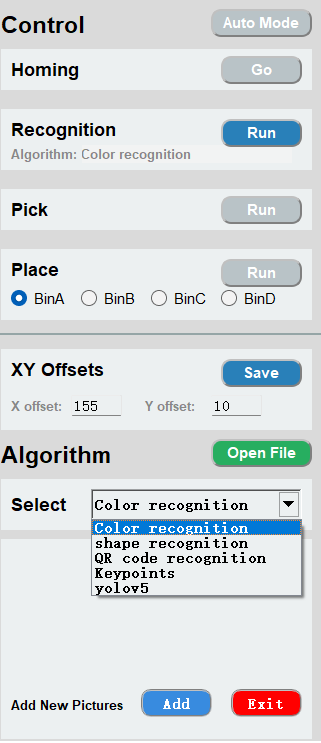
这是程序最关键的一部分,在算法选择栏里选择不同的算法执行不同的功能。
这就是这个可视化界面的大致讲解内容。
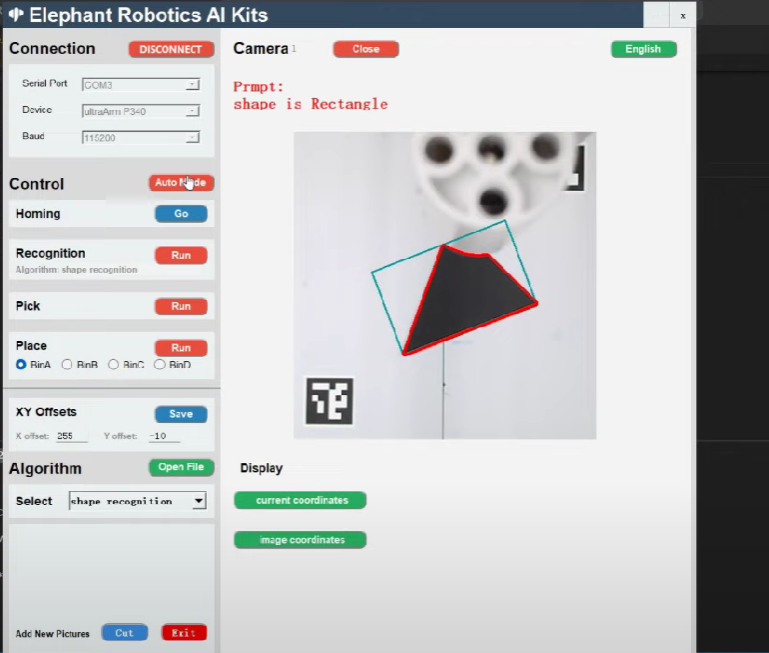
运行的流程:
连接机械臂->选择算法->开启相机->开启自动模式
aikit2023就可以运行起来了。
总结
如何来评价这个套装呢?
就如开头所说的一样这是一套非常适合入门学习机器视觉算法,机械臂基础知识,python的使用的一个套装。
整个程序是开源的,每段代码都写有详细的注释,可以自由的修改代码,用户可以从中了解一个程序的框架是如何搭建起来的,最关键的是如何将视觉算法跟机械臂运动控制结合起来,没有太多复杂的参数,简洁明了。
说到机械臂应用,就必定离不开《手眼标定》,手眼标定在机械臂应用场景是很重要的,有eye to hand 和 eye in hand 两种情况,来处理真实环境的数据和计算机中的数据之间的关系。
拥有aikit 1 的用户肯定一眼就知道aikit2023的最特别的一点在哪方面。
可视化界面的设计,用于显示数据,状态,结果等信息,提供了直观、易于理解的信息展示方式。可视化界面用于简化操作,帮助用户快速识别、访问和操作数据,并且能够以多种方式进行交互和操作。即使你对代码一点也不了解,你也可以成功的运行整个套装。
想必有许多用户想要知道aikit2023与之前的aikit 升级在了哪些方面上,有什么差异,我们在以后的文章中会向你讲解!
如果你喜欢这篇文章,欢迎留言和点赞,我们下次再见。