CW32系列模数转换器(ADC)
模数转换器(ADC)的主要功能是将模拟量转换为数字量,方便MCU进行处理。下面以CW32L083为例介绍CW系列的模数转换器的特点和功能,并提供演示实例。
一、概述
CW32L083 内部集成一个 12 位精度、最高 1M SPS 转换速度的逐次逼近型模数转换器 (SAR ADC),最多可将 16 路模拟信号转换为数字信号。现实世界中的绝大多数信号都是模拟量,如光、电、声、图像信号等,都要由 ADC 转换成数字信号,才能由 MCU 进行数字化处理。
二、主要特性
• 12 位精度
• 可编程转换速度,最高达 1M SPS
• 16 路输入转换通道:13 路外部引脚输入 - 内置温度传感器 - 内置 BGR 1.2V 基准 - 1/3 VDDA 电源电压
• 4 路参考电压源(Vref):- VDDA 电源电压 - ExRef(PB00)引脚电压 - 内置 1.5V 参考电压 - 内置 2.5V 参考电压
• 采样电压输入范围:0 ~ Vref
多种转换模式,全部支持转换累加功能 - 单次转换 - 多次转换 - 连续转换 - 序列扫描转换 - 序列断续转换
• 支持单通道、序列通道两种通道选择,最大同时支持 8 个序列
• 支持输入通道电压阈值监测
• 内置信号跟随器,可转换高阻抗输入信号
• 支持片内外设自动触发 ADC 转换
• 支持 ADC 转换完成触发 DMA
三、转换时序
ADC 的转换时序如下图所示:
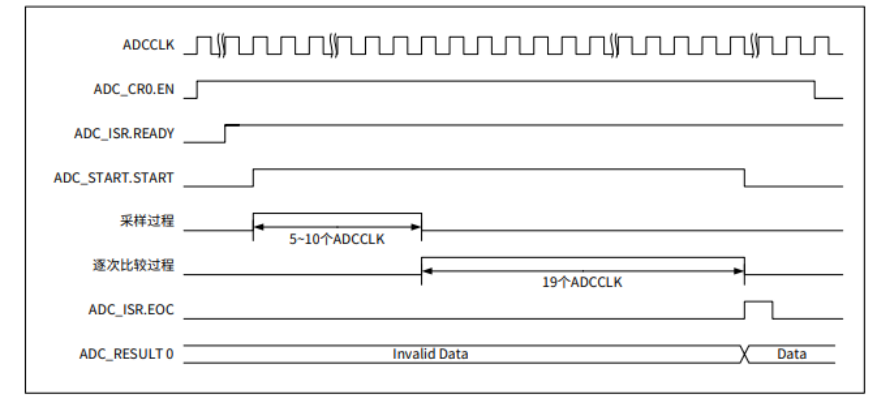
向 ADC 控制寄存器 ADC_CR0 的 EN 位域写入 1,使能 ADC 模块。
ADC_CR0.EN 由 0 变为 1 约 40μs 后 ADC_ISR.READY 标志位置 1,表示模拟电路初始化完成,可以开始进行 ADC 转换。
向 ADC 启动寄存器 ADC_START 的 START 位域写入 1,启动 ADC 转换,转换完成后硬件自动清零。
ADC 工作时钟 ADCCLK,由系统时钟 PCLK 经预分频器分频得到,通过控制寄存器 ADC_CR0 的 CLK 位域可选择 1 ~ 128 分频
四、工作模式
ADC 控制寄存器 ADC_CR0 的 MODE 位域配置 ADC 工作模式
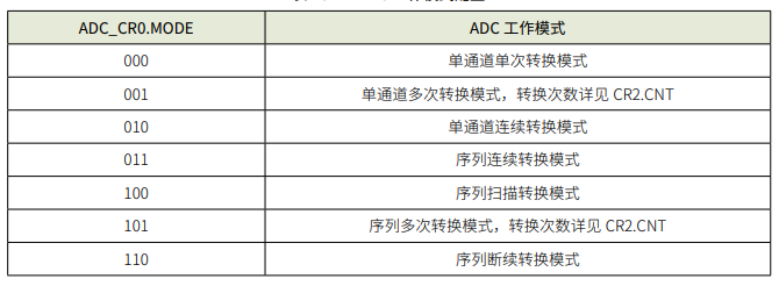
启动 ADC 转换,可通过向 ADC 启动寄存器 ADC_START 的 START 位域写 1;也可通过其他外设来触发。
五、实际案例
GTIM1定时器定时1S,定时器1S中断触发启动ADC转换,采样AIN1,并通过GTIM2以PWM方波输出ADC采样值:PWM占空比50%,周期为1Hz-5000Hz,对应ADC的0-4095采样值。
1.配置ADC测试IO口
void ADC_PortInit(void){REGBITS_SET(CW_SYSCTRL->AHBEN, SYSCTRL_AHBEN_GPIOA_Msk); //打开GPIO时钟REGBITS_SET(CW_SYSCTRL->APBEN2, SYSCTRL_APBEN2_ADC_Msk); //打开ADC时钟PA01_ANALOG_ENABLE();//set PA01 as AIN1 INPUT}2.LED初始化
void LED_Init(void){GPIO_InitTypeDef GPIO_InitStructure = {0};REGBITS_SET(CW_SYSCTRL->AHBEN, SYSCTRL_AHBEN_GPIOC_Msk); //打开GPIO时钟/* Configure the GPIO_LED pin */GPIO_InitStructure.Pins = GPIO_PIN_2 | GPIO_PIN_3;GPIO_InitStructure.Mode = GPIO_MODE_OUTPUT_PP;GPIO_Init(CW_GPIOC, &GPIO_InitStructure);PC02_SETLOW();//LEDs are off.PC03_SETLOW();}
3.PWM IO初始化
void PWM_PortInit(void){GPIO_InitTypeDef GPIO_InitStructure = {0};/* PA5 PWM 输出 */__RCC_GPIOA_CLK_ENABLE();/* Configure the PWM output pin */GPIO_InitStructure.Pins = GPIO_PIN_5;GPIO_InitStructure.Mode = GPIO_MODE_OUTPUT_PP;GPIO_Init(CW_GPIOA, &GPIO_InitStructure);PA05_AFx_GTIM2CH1();}4.GTIM初始化
void GTIM_Init(void){GTIM_InitTypeDef GTIM_InitStruct = {0};//REGBITS_SET(CW_SYSCTRL->APBEN1, SYSCTRL_APBEN1_GTIM1_Msk); //打开GTIM1 __RCC_GTIM1_CLK_ENABLE(); //打开GTIM1时钟GTIM_InitStruct.Mode = GTIM_MODE_TIME;GTIM_InitStruct.OneShotMode = GTIM_COUNT_CONTINUE;GTIM_InitStruct.Prescaler = GTIM_PRESCALER_DIV1024;GTIM_InitStruct.ReloadValue = 62499ul; //T=1s.GTIM_InitStruct.ToggleOutState = DISABLE;GTIM_TimeBaseInit(CW_GTIM1, >IM_InitStruct);GTIM_ITConfig(CW_GTIM1, GTIM_IT_OV, ENABLE);NVIC_ClearPendingIRQ(GTIM1_IRQn);NVIC_EnableIRQ(GTIM1_IRQn);NVIC_SetPriority(GTIM1_IRQn, 0x03);__RCC_GTIM2_CLK_ENABLE();//打开GTIM2时钟GTIM_InitStruct.ReloadValue = 0xFFFFu;GTIM_InitStruct.ToggleOutState = ENABLE;GTIM_TimeBaseInit(CW_GTIM2, >IM_InitStruct);valuePeriod = GTIM_InitStruct.ReloadValue;valuePosWidth = valuePeriod >> 1u;GTIM_OCInit(CW_GTIM2, GTIM_CHANNEL1, GTIM_OC_OUTPUT_PWM_HIGH);GTIM_SetCompare1(CW_GTIM2, valuePosWidth);GTIM_Cmd(CW_GTIM2, ENABLE);}5.主程序main
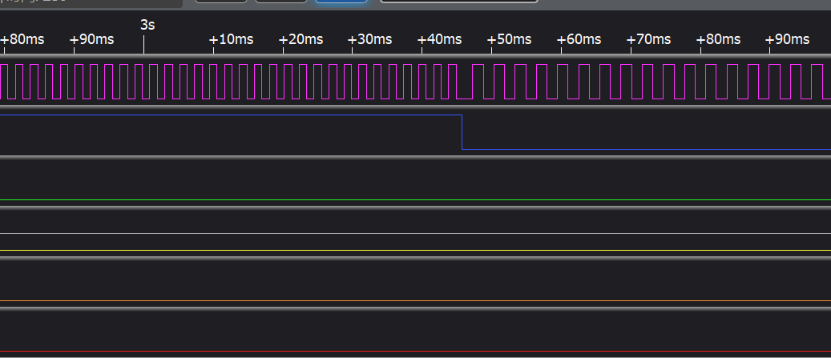
uint16_t valueAdc;uint32_t valueAdcAcc;volatile uint8_t gFlagIrq;uint16_t gCntEoc = 0;uint8_t cntSample;float fTsDegree;uint32_t valuePeriod;uint32_t valuePosWidth;uint32_t valueReload = 0xFFFFu;int main(void){ uint8_t res;ADC_InitTypeDef ADC_InitStructure = {0};ADC_WdtTypeDef ADC_WdtStructure = {0};ADC_SingleChTypeDef ADC_SingleChStructure = {0};RCC_HSI_Enable(RCC_HSIOSC_DIV6); //以下从HSI切换到PLLRCC_PLL_Enable(RCC_PLLSOURCE_HSI, 8000000UL, RCC_PLL_MUL_8); //开启PLL,PLL源为HSI__RCC_FLASH_CLK_ENABLE();//打开FLASH时钟FLASH_SetLatency(FLASH_Latency_3);res = RCC_SysClk_Switch(RCC_SYSCLKSRC_PLL); //切换系统时钟到PLL:64MHz。ADC_PortInit();//配置ADC测试IO口LED_Init();//LED初始化PWM_PortInit();GTIM_Init();ADC_StructInit(&ADC_InitStructure); //ADC默认值初始化ADC_WdtInit(&ADC_WdtStructure); //ADC模拟看门狗通道初始化ADC_InitStructure.ADC_ClkDiv = ADC_Clk_Div128; //ADCCLK:500KHz.ADC_InitStructure.ADC_InBufEn = ADC_BufEnable;ADC_InitStructure.ADC_SampleTime = ADC_SampTime10Clk;ADC_SingleChStructure.ADC_DiscardEn = ADC_DiscardNull; //配置单通道转换模式ADC_SingleChStructure.ADC_Chmux = ADC_ExInputCH1; //选择ADC转换通道ADC_SingleChStructure.ADC_InitStruct = ADC_InitStructure;ADC_SingleChStructure.ADC_WdtStruct = ADC_WdtStructure;ADC_SingleChOneModeCfg(&ADC_SingleChStructure);ADC_ITConfig(ADC_IT_EOC, ENABLE);ADC_EnableIrq(ADC_INT_PRIORITY);ADC_ClearITPendingAll();ADC_Enable();//ADC使能ADC_ExtTrigCfg(ADC_TRIG_GTIM1, ENABLE); //ADC外部中断触发源配置GTIM_Cmd(CW_GTIM1, ENABLE);while (1){while (!(gFlagIrq & ADC_ISR_EOC_Msk));gFlagIrq = 0u;PC03_TOG();valueAdc = ADC_GetConversionValue();valueReload = ((4095u * 125000ul) / (4999u * valueAdc + 4095u) + 1) >> 1;GTIM_SetCounterValue(CW_GTIM2, 0u); //reset.GTIM_SetReloadValue(CW_GTIM2, valueReload);GTIM_SetCompare1(CW_GTIM2, valuePosWidth);//等待ADC外部中断触发源启动下一次ADC转换}}6.实验展示
通用定时器GTIM1定时1s自动触发ADC模块进行转换,ADC通道为AIN1:PA01。
通用定时器GTIM2将AIN1的ADC采样值转换成频率可变的PWM方波,占空比50%,使用PA05作为PWM输出。ADC采样值为0时,PWM方波频率为1Hz;ADC采样值为4095时,PWM方波频率为5KHz。