用于汽车传感器的混合点云语义压缩:性能评估
Hybrid Point Cloud Semantic Compression for Automotive Sensors: A Performance Evaluation
https://arxiv.org/pdf/2103.03819.pdf
在自动驾驶中,车辆与车辆之间的信息共享起着重要作用。在所有传感器中,激光雷达产生的3D点云的数据量通常较高。因此,有效的LiDAR点云压缩方案对于减轻带宽受限信道上的数据传输负担和促进实时通信至关重要。
这篇文章将谷歌的点云压缩软件Draco与语义分割分割模型RangeNet++结合起来,提出了混合语义压缩(Hybrid Semantic Compression,HSC)。在SemanticKITTI数据集的实验表明,HSC可以在有限的精度降低的情况下提供准实时(quasi-real-time)的压缩性能,
流程
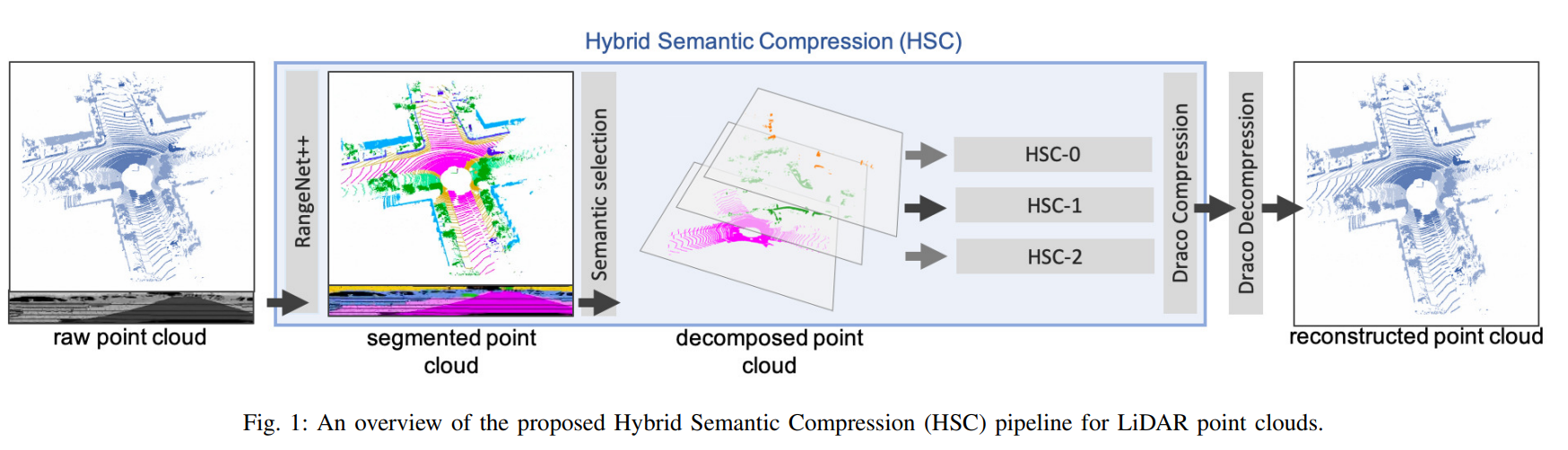
如图1所示,所提出的HSC流程如下:
(1) 使用RangeNet++对激光雷达点云进行语义分割,以便标记场景中最有价值的对象(通常是行人和车辆)。如果信道容量有限,则可以选择延迟或取消不重要点的传输。
RangeNet++:https://binaryai.blog.csdn.net/article/details/126102403
(2) 使用Draco压缩筛选得到的点云。Draco允许定义15个量化级别(0−14)和11个压缩级别(0–10),以权衡压缩效率和速度。
DRACO:https://github.com/google/draco
HSC
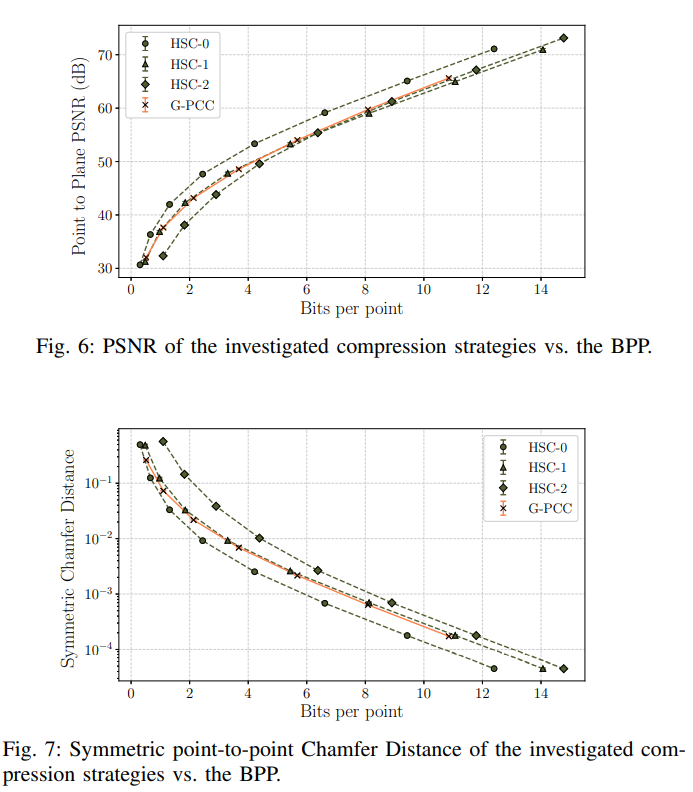
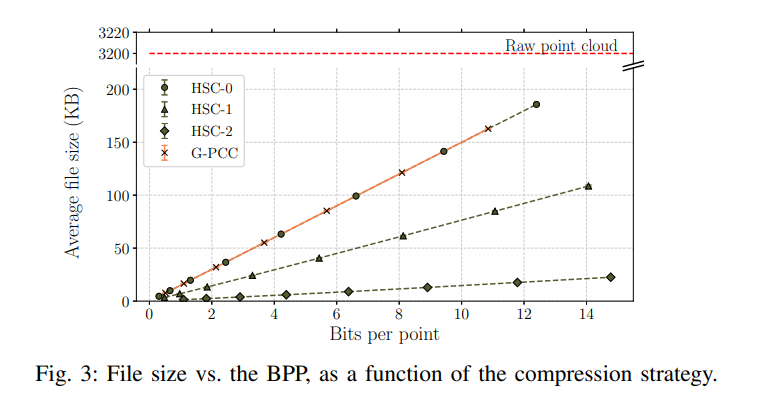
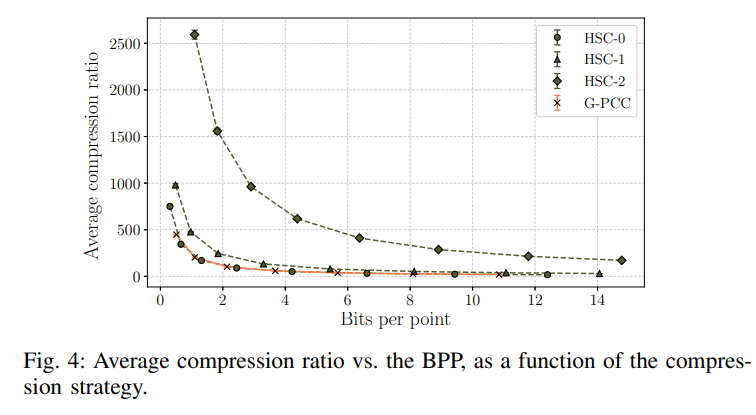
HSC被设计用于支持三种传输级别:
HSC-0::原始激光雷达采集的点云直接被Draco压缩并通过信道发送。在这种情况下,不使用RangeNet++。
HSC-1: RangeNet++用于对原始激光雷达执行语义分割,如图2所示。
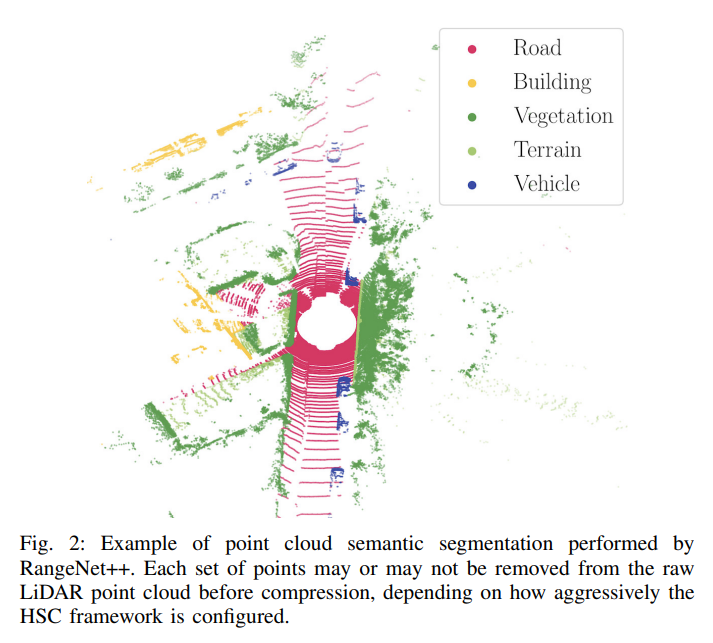
之后,从点云中删除属于道路类的点,从而减少文件大小再压缩。假设可以从辅助数据源(如谷歌地图或类似地图工具)获得道路信息,则这种方案是合理的。
HSC-2: 与HSC-1相比更进一步地,在RangeNet++分割后,可能由摄像机传感器提供的建筑物、植被和交通标志也会从点云中移除。因此,要压缩的最终点云仅由行人和车辆等动态元素组成,即自动驾驶场景中最关键的元素。
结果
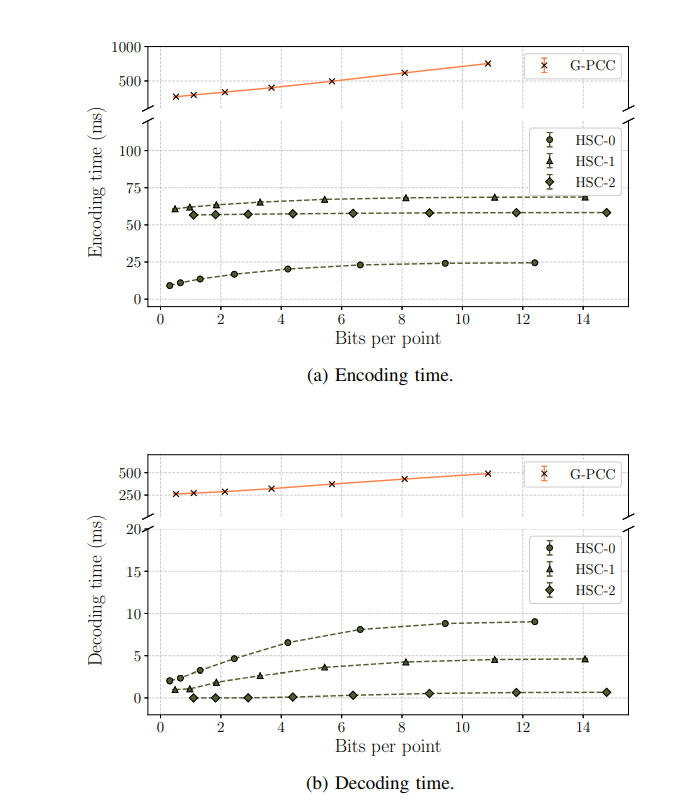
HSC-1 和HSC-2的编码时间还需要考虑RangeNet++ 推理时间