加速度传感器的量程估算
下面推导过程中包含一个重要的错误:sinx/x=1没有错,但是这里的x是 t,当x = t时,位移并非sin(t),而是n*sin(t),我稍後修訂。
在测震动和噪声的场合,现有的加速度传感器,需要客户提供加速度值的大致区间。这个值该怎么计算呢?它几乎完全与被测信号的频率有关。因为所有的信号,按照频域展开的视角,都会简化为一个个正弦波。对于正弦波有这样的属性:
过零点的速度是1米/秒。因为当x->0, sinx/x = 1,在pi/2的位置,纵向位移=0,此时速度=0.
所以,宏观的加速度:
a = v(0) - v(pi/2) /timespan(pi/2)
一个周期的流逝时间是1/f, pi/2流失的时间是1/4*(1/f) = 1/(4*f)
所以,加速度:a = 1 / (1/(4*f))
a = 4*freq所以,对于工频信号50 Hz,如果这个电源震荡表现为机械震荡,那么加速度 = 4*50 = 200 m/s^2.
换算成重力加速度的G,需要除以重力加速度9.8.
大约20个G。
三相电机,一般极对数是3,机械振动的基频要除以3,所以,最终的加速度值:6.67G
震动分析时,一般可能还需要分析一些谐振,你的频谱需要扩展到高频谐波。需要扩展几倍,最终的加速度传感器的量程直接乘以多少即可。
附上几个额外的消息,大概了解一下,这种震动的测量值区间:
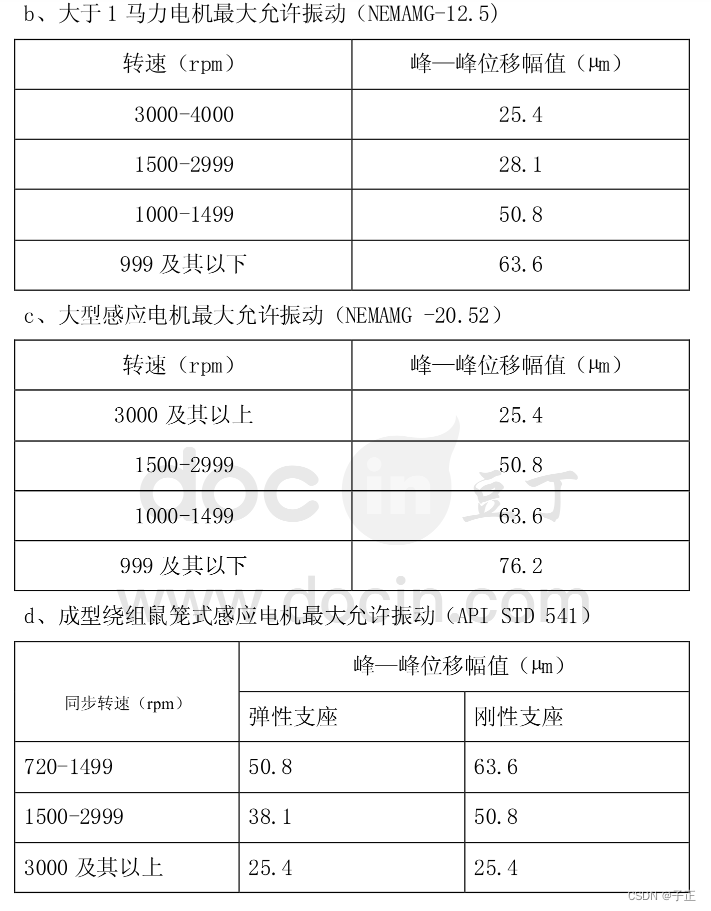
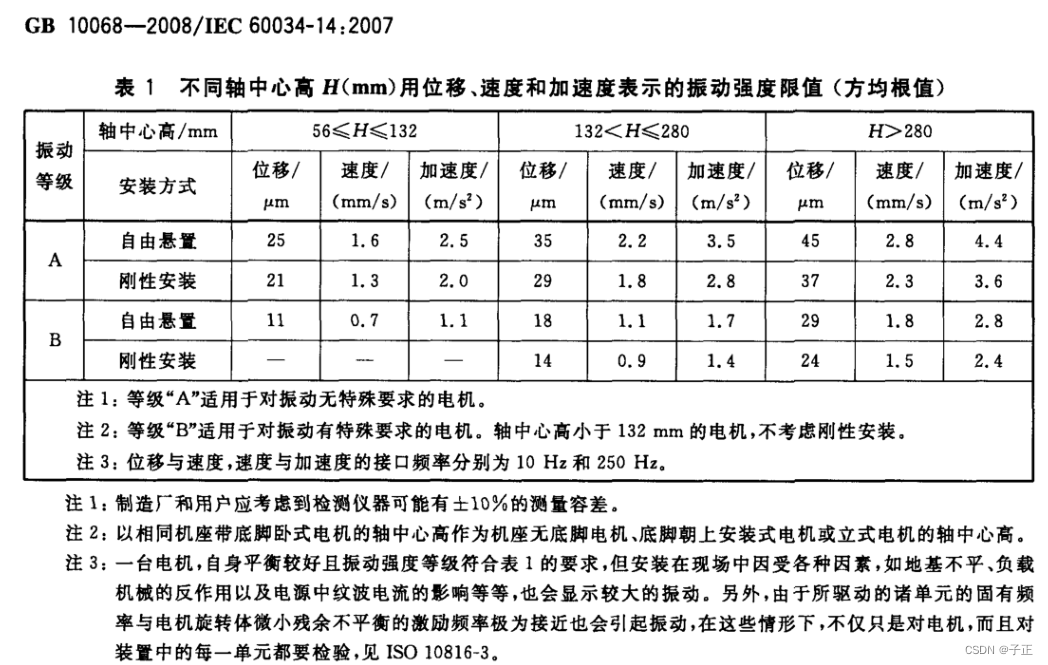
我无法解释GB10068-2008那个加速度值为什么会那么小。实际的设备在额定功率下运行,会有转差率的概念,但是此时,转速仍然与额定转速相差不会太大。如果转速体现为震动,则上述的推导过程仍然近似适用,误差不会超过5%。所以,GB10068-2008那个加速度指标到底是什么?它是设备本身的一个本征震动。并不是完全由转速得来?
大概计算一下:
如果位移是45um,这个位移可能指PkPk,
那么速度 = 45e-6/(1/50*3/2) = 1.5 mm/s 奇怪,这里与GB10068-2008差1倍。
加速度 = 1.5e-3/s(1/50*3/4) = 0.1m/S^2, 这个值与GB10068-2008差40倍。