车载红外夜视「升温」
红外夜视赛道,正在升温。
本周,全球车载后视镜头部供应商Gentex宣布,领投以色列热成像技术初创公司ADASKY,后者在B轮融资中拿到了3000万美元。按照计划,Gentex将协助ADASKY将红外夜视技术推向汽车市场。
事实上,到目前为止,不管是可见光摄像头、毫米波雷达还是激光雷达,始终存在一些感知盲区,如何确保车辆在任何环境和任何条件下都能全天候感知周围环境,一直是从辅助驾驶向自动驾驶迈进的门槛之一。
过去二十多年时间,远红外(LWIR)技术在汽车夜视系统已经存在,但规模化应用一直受到限制;一方面,成本较高,大多数仍是传统豪华品牌的选装;另一方面,在相关的算法、数据集、功能安全等方面,有所欠缺。
高工智能汽车研究院监测数据显示,2022年中国市场(不含进出口)乘用车前装标配搭载红外夜视系统交付仅有2.11万辆,同比上年同期增长42.57%。其中,除宝马、奥迪、凯迪拉克等传统豪华品牌之外,岚图两款车型均有搭载,并带动国内更多车型开始选用红外夜视,增强辅助驾驶。
目前,汽车夜视分为两类:被动夜视和主动夜视。被动系统(红外夜视热成像仪)使用热成像摄像机,照亮物体、动物和人散发的热量。
相比于主动系统使用红外线光源照亮黑暗场景,被动系统容易区分像人这样的发热物体和像马路这样的较冷物体之间的区别。同时,被动夜视的探测范围往往大于主动夜视。
红外夜视热成像仪可以帮助驾驶员在光照条件差、重度雾霾等恶劣天气、环境下感知道路环境及周边行人车辆,进行一些预警甚至制动的功能,解决可见光及其他传感器无法解决的场景。
按照ADASKY的说法,该公司优化了成本结构、功能安全、系统架构和性能、图像处理算法和计算机视觉解决方案,以满足汽车市场的独特需求。「LWIR摄像头将成为自动驾驶汽车中最重要的传感器之一,也是实现全自动驾驶的传感器套件的重要组成部分。」
从物理特性来看,与毫米波雷达、激光雷达等传感器不同,红外夜视系统和可见光摄像头一样,都属于被动传感器,感知来自物体辐射热量的信号。最重要的是,红外夜视可以在几乎任何照明或天气条件下都能正常工作,并能区分生命特征,以及常规的车辆、路面和路边障碍物。
此外,由于每种材料都有不同的辐射热量率,因此红外夜视同样可以借助深度学习,实现物体的分类和识别。按照ADASKY的说法,该公司的系统灵敏度为0.05摄氏度,可实现高对比度成像,可以精确检测230米以外的车辆、行人、骑自行车的人、动物和其他物体。
同时,ADASKY的红外夜视摄像头,还采用了专用集成电路(ASIC)、ISP与图像处理算法,可提供高分辨率视频影像。同时,在补偿方面,这套系统采用了自研的校正算法,可以呈现出清晰的图像供处理,刷新率为每秒30或60帧。分辨率为VGA(640×480),每帧307,200像素。
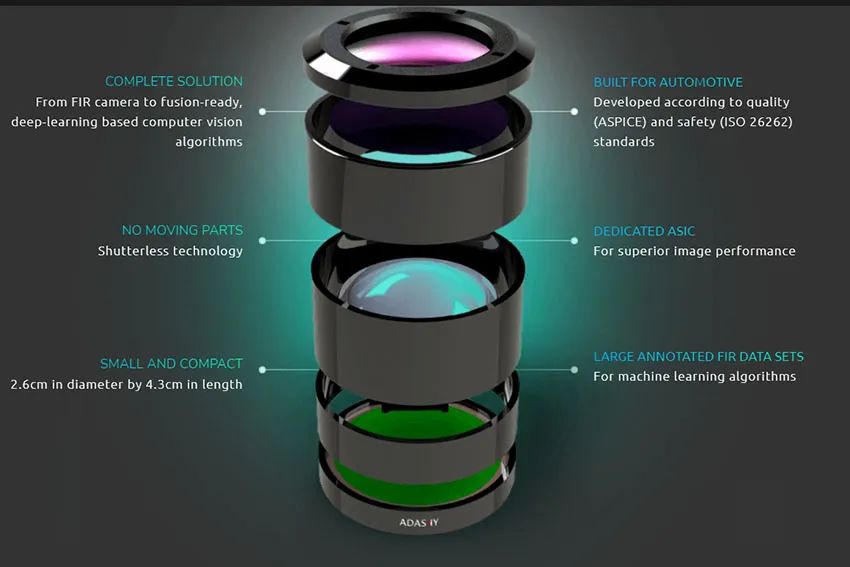
其中,AdaSky和意法半导体合作开发ASIC解决方案,基于后者的28nm FD-SOI技术提供高性能处理能力,远红外热成像仪与计算机视觉算法相结合,提高自动驾驶所需的感知可靠性和冗余度。
而最大的改变,来自ADASKY的独有「无快门技术」,传统的红外传感器必须在几分钟后重新校准,以便能够再次准确地探测到发热体。但这个过程大约需要半秒,这对于智能驾驶功能来说是无法接受的。
“我们已经开发了一种获得专利的图像处理算法,这是迄今为止世界上唯一一种不需要暂停图像采集的校准算法,这也是红外夜视真正进入规模化、多感知融合的技术门槛。”在ADASKY公司看来,另一个优势在于,与基于CMOS相机的图像分析相比,会有更少的假阳性情况。
而在国内市场,也有企业正在加速推动前装量产。
为满足高速高动态的使用要求,高德红外在国内首先开发了640×512@25μm帧积分非制冷探测器,已经完成了样机研制,通过了第三方的应用验证。应车载项目需求,针对车载应用产品的批量化交付和低成本要求,开发了新的LCC封装技术,以满足用户对探测器低成本、高性能、通用性高的要求。
此外,该公司研制出第三代基于红外+可见光+激光雷达的多传感器融合的高级辅助驾驶系统,并在东风、广汽埃安、百度、陕汽等多家车厂车型上实现前装批量应用。其中,东风猛士、广汽埃安昊铂系列前装定点项目正在进入上车周期。