开放原子训练营(第三季)RT-Thread Nano学习营一探究竟
前言
不知道从什么时候起,智能设备开始普及到了我们日常生活的方方面面。下班还未到家,热水器就可以调到合适的温度;上班刚进公司,忘关空调也不再是什么烦恼;诸如夜晚的灯光变换,白昼的窗帘适应等更给我们的生活带来诸多方便与快乐。
那么有没有小伙伴曾经困惑或者思考过,为什么汽车可以不需要人来驾驶?为什么工业可以不需要人来把关?为什么便利店不需要收银员来收银结算?为什么小饭馆不需要大厨师来调色增香?
其实这一切都得益于一个技术的诞生与发展:物联网(Internet of Things),或者我们可以更抽象的说它是万物互联。
那么物联网到底是什么呢?
物联网简介
物联网是指通过信息感知设备和信息传输设备,按约定的协议,将物与物、物与人通过网络相连接,物体通过信息传播媒介进行信息交换和通信,以实现智能化识别、定位、跟踪、监控与管理等功能。
这其中,有三个至关重要的概念:
- 感知层:通过各种传感器采集信息,识别物体的特征、位置、状态等信息
- 网络传输层:通过网络实现物与物、物与人之间的信息交换
- 应用层:依据采集的大量数据,通过计算机信息系统进行存储、处理与分析,实现对物体的智能监控与控制
那么你可能有疑问,这么牛逼的东西是怎么运行的,那些能控制硬件的代码是怎么写出来的呢?
物联网操作系统原理探究
接着上面的话继续聊。
想要实现物联网的相关功能,物联网操作系统是不可或缺的部分。物联网操作系统由内核、通信支持(WiFi/蓝牙、2/3/4G等通信支持、NFC、RS232/PLC支持等)、外围组件(文件系统、GUI、Java虚拟机、XML文件解析器等)、集成开发环境等组成。
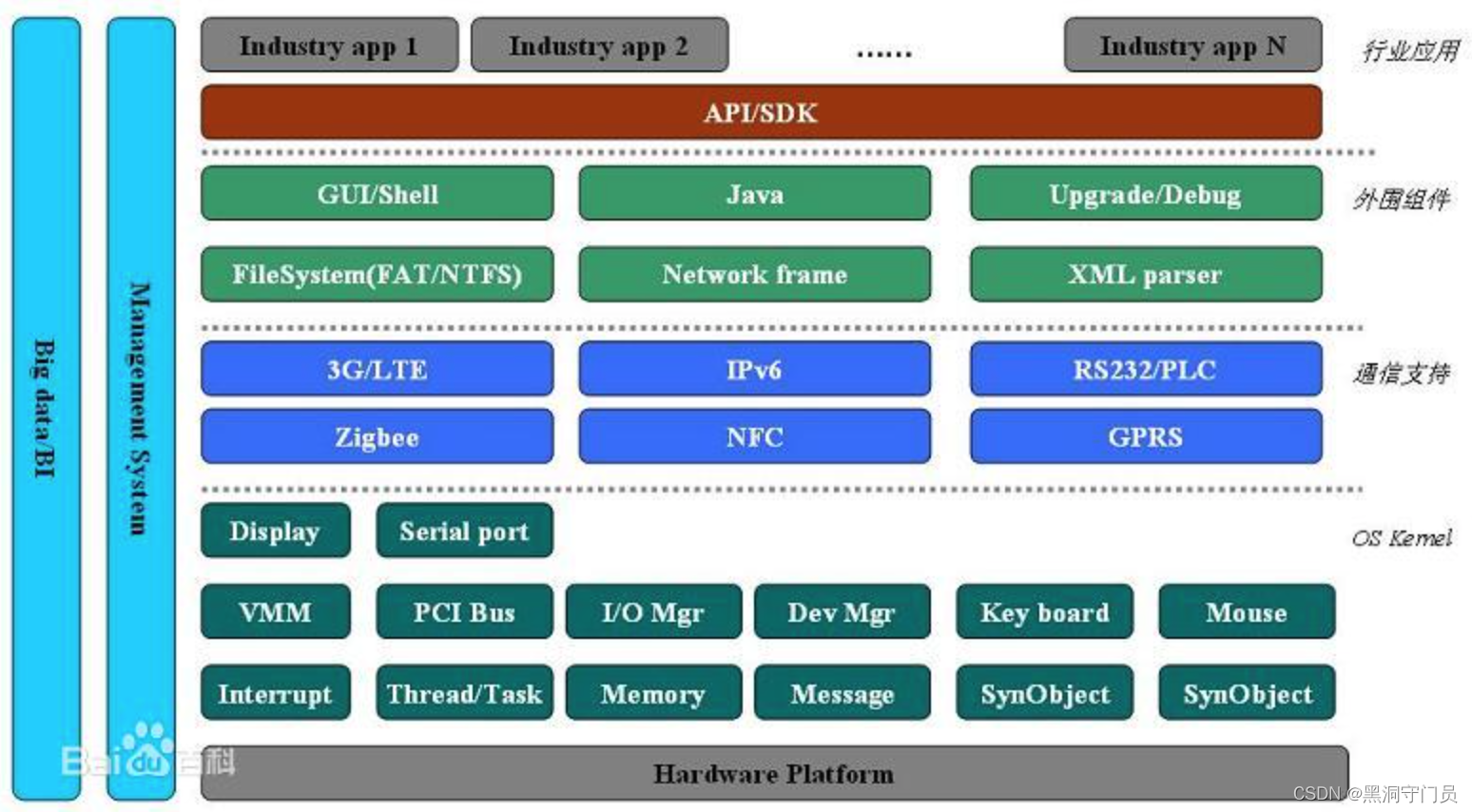
简而言之,物联网操作系统是对底层硬件资源进行管理和调度,为上层的应用程序提供稳定可靠的运行环境的一套系统。
从上面的图可以看出,物联网操作系统的主要操作原理如下:
- 硬件抽象层:抽象出CPU、内存、总线等底层硬件设备,为上层系统提供统一的接口。
- 内核:负责系统的核心功能,包括线程管理、中断管理、定时器管理、内存管理、信号量/消息队列等IPC机制等。
- 组件与服务:在内核之上提供文件系统、GUI、数据库、网络协议栈等服务。这些服务由相应的组件实现,开发者可以根据需求配置需要的组件。
- 驱动模型:提供统一的设备驱动框架和各种设备的驱动,实现对底层硬件的管理与调度。
- 应用程序:运行在操作系统之上的具体应用,通过调用操作系统提供的API实现相应的业务功能。
它们之间的架构关系如下图所示:
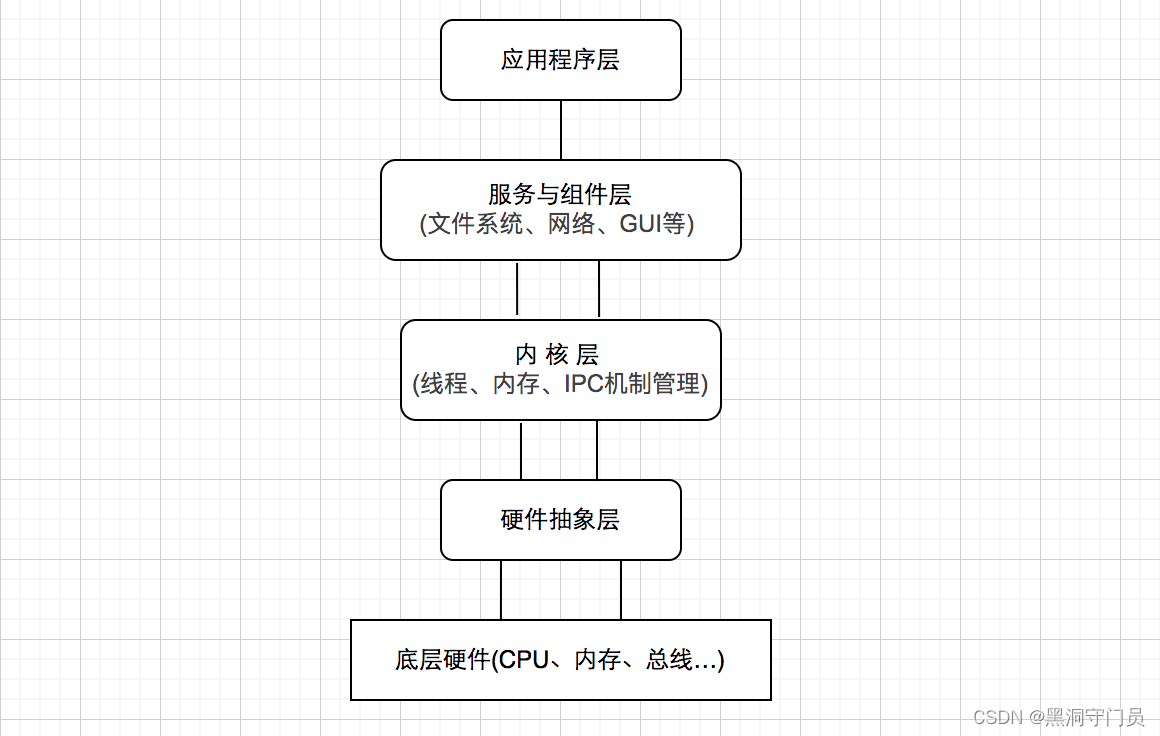
从上到下,每一层的运行都依赖于下一层的功能。应用程序通过操作系统提供的 API 调用服务与组件层和内核层,最终管理底层硬件。这就是一个典型物联网操作系统的主要操作原理。
下面介绍一个非常好用的物联网操作系统---- RT-Thread
RT-Thread 简介
正好 CSDN 就有相关的课程,感兴趣的小伙伴可以移步16天入门物联网操作系统——RT-Thread 。
RT-Thread 是一个集实时操作系统(RTOS)内核、中间件组件和开发者社区于一体的国产开源技术,诞生于2006年,由熊谱翔先生带领并集合开源社区力量开发而成。RT-Thread也是一个组件完整丰富、高度可伸缩、简易开发、超低功耗、高安全性的物联网操作系统。
RT-Thread 具备一个IoT OS平台所需的所有关键组件,例如GUI、网络协议栈、安全传输、低功耗组件等等。经过13年的累积发展,RT-Thread已经拥有一个国内最大的嵌入式开源社区,同时被广泛应用于能源、车载、医疗、消费电子等多个行业,累积装机量超过两千万台,成为国人自主开发、国内最成熟稳定和装机量最大的开源RTOS。
RT-Thread 拥有良好的软件生态,支持市面上所有主流的编译工具如GCC、Keil、IAR等,工具链完善、友好,支持各类标准接口,如POSIX、CMSIS、C++应用环境、Javascript执行环境等,方便开发者移植各类应用程序。商用支持所有主流MCU架构,如ARM Cortex-M/R/A, MIPS, X86, Xtensa, C-Sky, RISC-V,几乎支持市场上所有主流的MCU和Wi-Fi芯片。
当前的 RT-Thread 有多个版本,分别是:标准版,Nano版和Smart版本。
关于这三个版本,伙伴可以去 RT-Thread 官网查看更详细的内容。
前言铺垫了这么多,终于来到我们的主题,RT-Thread Nano 学习营。
RT-Thread Nano使用
RT-Thread Nano 是使用 C 语言开发一个极简版的硬实时内核,它的内存资源占用极小,功能包括任务处理、软件定时器、信号量、邮箱和实时调度等相对完整的实时操作系统特性。适用于家电、消费电子、医疗设备、工控等领域大量使用的 32 位 ARM 入门级 MCU 的场合。
软件框图:
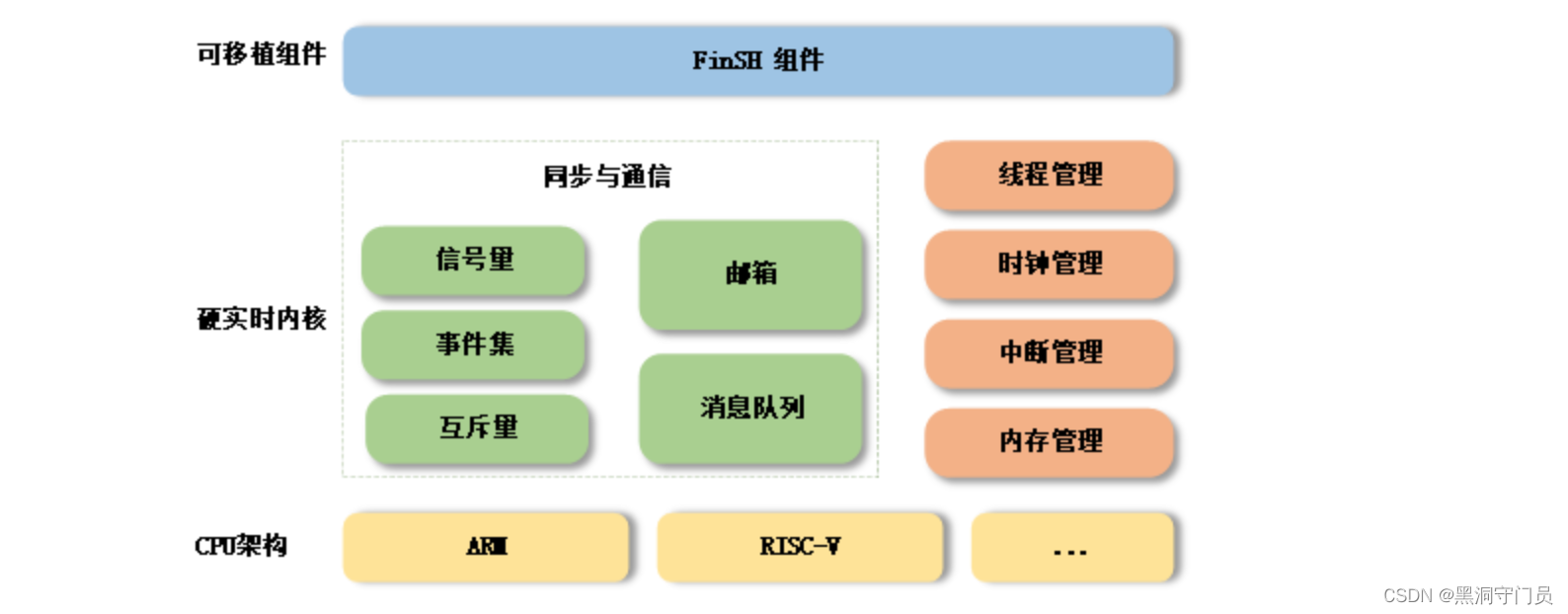
Nano 版本支持的架构有 ARM(Cortex M0/ M3/ M4/ M7 等)、RISC-V 及其他,内置的功能有线程管理、线程间同步与通信、时钟管理、中断管理、内存管理。
开发环境搭建
使用 RT-Thread Nano,需要先搭建它的环境。
- 我们可以从 RT-Thread 官网下载源码包
- 或者点击这里直接下载压缩包,这样可以基于其他开发环境移植 RT-Thread Nano,比如 IRA
- 或者我们通过一站式的 RT-Thread 开发工具 RT-Thread Studio 来创建 RT-Thread Nano 工程,可以从这里 获取安装RT-Thread Studio
- 或者我们也可以基于 Keil MDK 或者 CubeMX 来移植 RT-Thread Nano。
下面重点介绍从 RT-Thread Studio 开始创建项目。
在RT-Thread Studio 上使用 RT-Thread Nano
第一步先安装 RT-Thread Studio,这里就略过了。
安装好以后,我们打开 IDE,先更新 SDK。

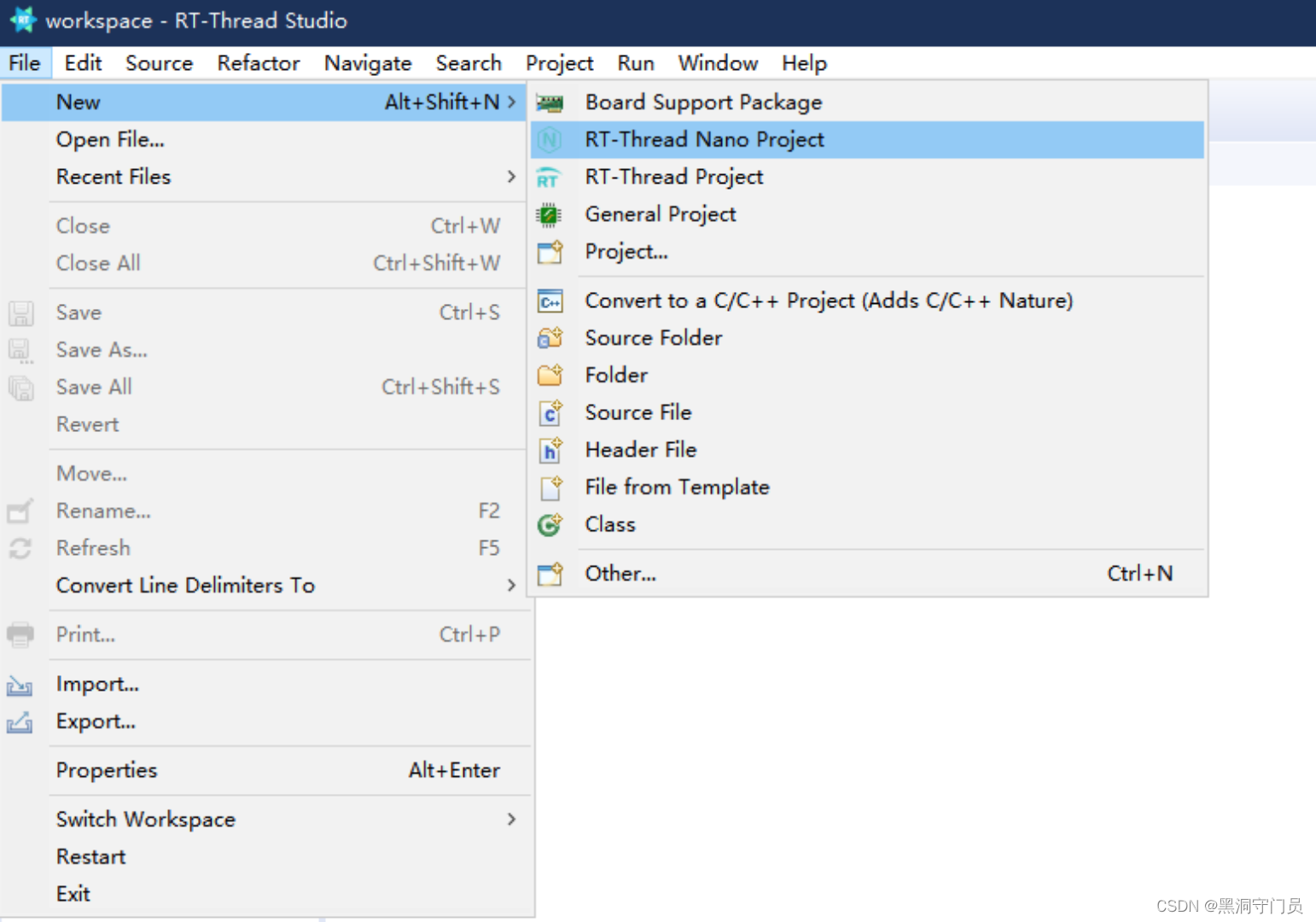
更新完成后,就可以新建 Nano 工程,在左上角依次点击File > New > RT-Thread Nano Project,就会弹出新建项目的配置页面。
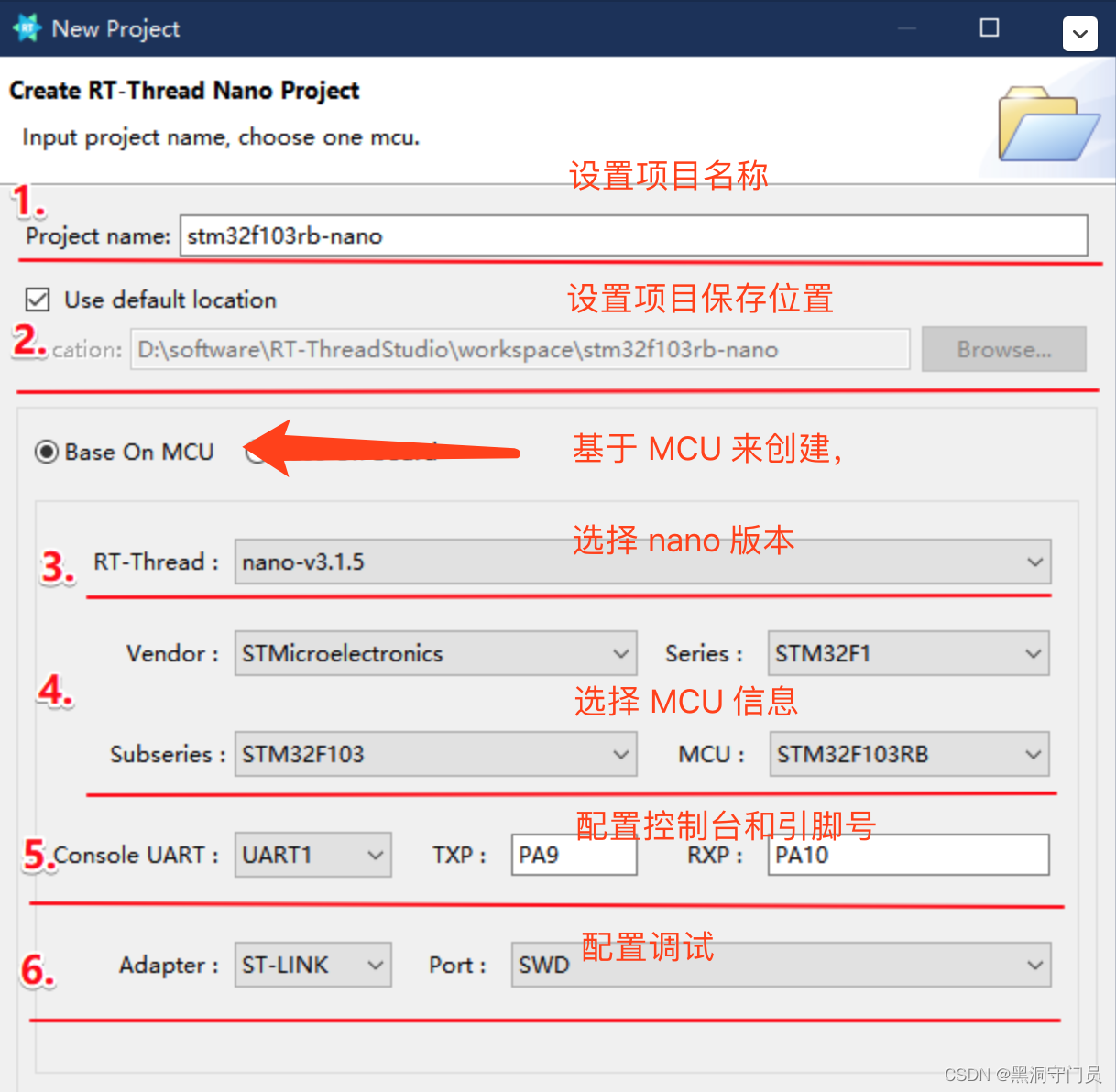
下图是基于芯片来创建项目
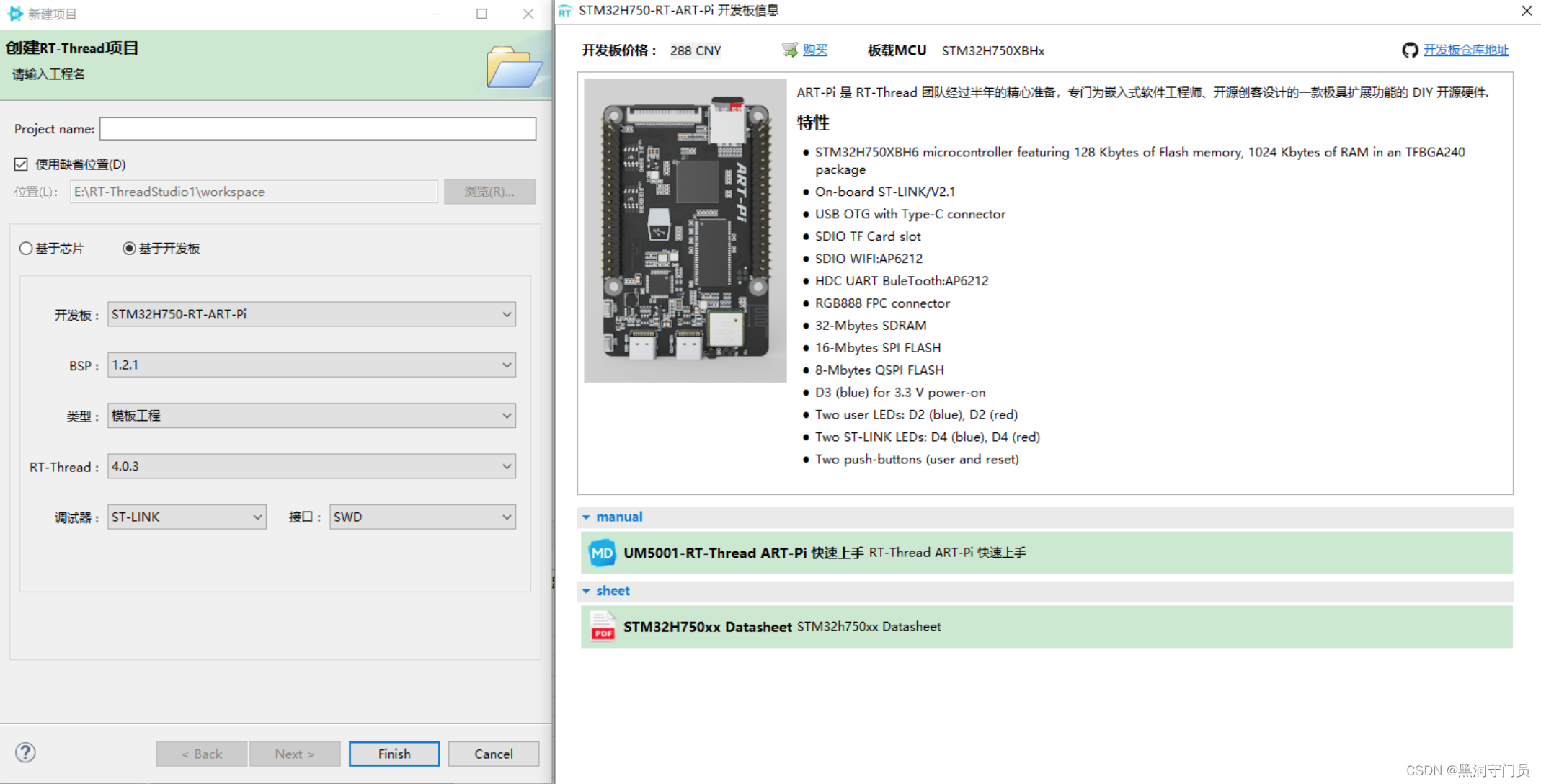
如果是基于开发板,就需要我们选择开发板型号,BSP 版本号,RT-Thread 源码版本,调试器和调试接口等信息,如下图:
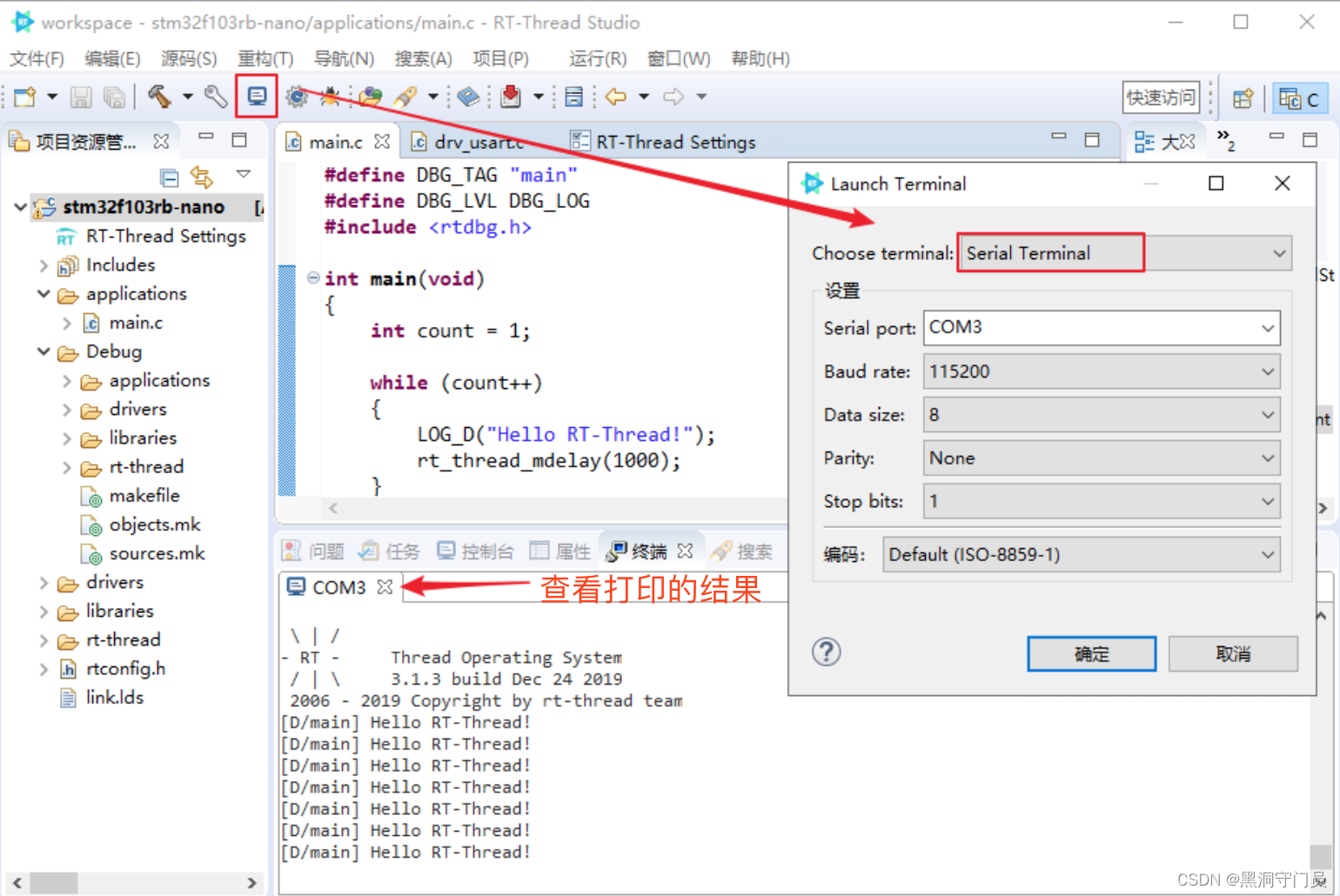
这样就创建完成了。接下来写一段代码,比如打印Hello RT-Thread!,连接硬件,进行编译下载
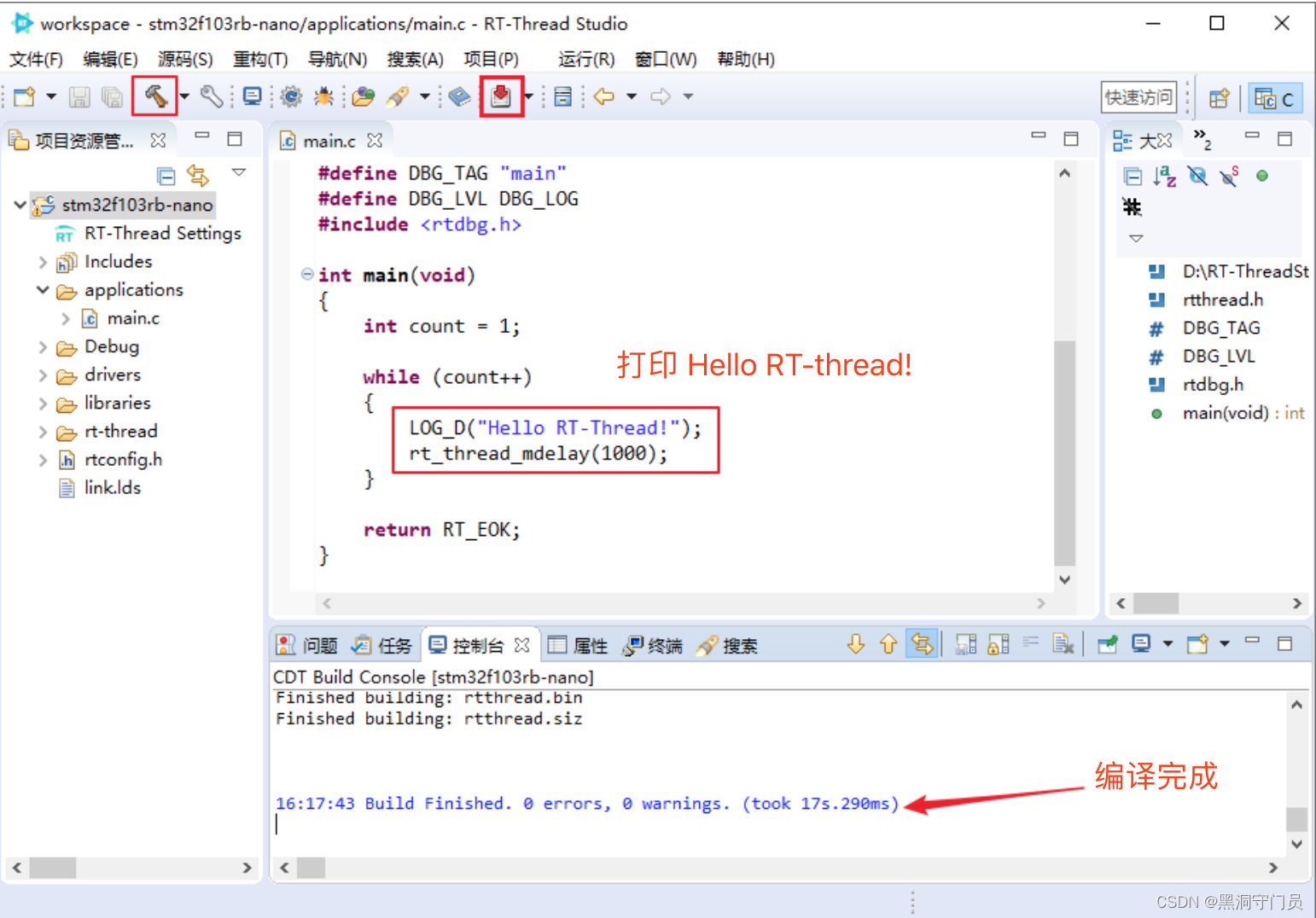
由于项目配置的时候,我们配置了控制台串口号及引脚号,所以工程中已经实现了 uart 的驱动以及 rt_hw_console_output() ,可以默认进行打印。
下面我们尝试几个简单的示例:
- 这是一个串口通信的示例:
int main()
{ /* 查找串口设备 */ rt_device_t serial; serial = rt_device_find("uart1"); /* 打开串口设备 */ rt_device_open(serial, RT_DEVICE_FLAG_RDWR | RT_DEVICE_FLAG_INT_RX); /* 设置串口接收回调函数 */ rt_device_set_rx_indicate(serial, uart_rx_ind); /* 发送字符串 */ rt_device_write(serial, 0, "Hello RT-Thread!", 15);
} void uart_rx_ind(rt_device_t dev, rt_size_t size)
{ /* 读取数据 */ rt_uint8_t buff[32] = {0}; rt_device_read(dev, 0, buff, size);
}
- 这是一个定时器的示例:
/* 定时器控制块 */
static struct rt_timer timer; /* 定时器回调函数 */
static void timeout(void *parameter)
{ /* 线程函数打印了timeout reached! */rt_kprintf("timeout reached!\n");
} int main()
{ /* 初始化定时器 */ rt_timer_init(&timer, "timer", timeout, RT_NULL, 10, RT_TIMER_FLAG_ONE_SHOT); /* 启动定时器 */ rt_timer_start(&timer);
}
- 创建线程与删除线程
#include <rtthread.h>#define THREAD_PRIORITY 25
#define THREAD_STACK_SIZE 512
#define THREAD_TIMESLICE 5ALIGN(RT_ALIGN_SIZE)
static rt_uint8_t thread_stack[THREAD_STACK_SIZE];
static struct rt_thread tid1;/* 线程入口 */
static void thread_entry(void* parameter)
{/* 线程函数打印了Hello RT-Thread! */rt_kprintf("Hello RT-Thread!\n"); rt_thread_mdelay(500);
}int main()
{ /* 创建线程,接受线程名称,线程入口函数,线程参数,线程栈及大小,优先级和时间片*/ rt_thread_init(&tid1,"thread1",thread_entry,RT_NULL,thread_stack,THREAD_STACK_SIZE,THREAD_PRIORITY,THREAD_TIMESLICE); /* 启动线程 */ if (&tid1 != RT_NULL) rt_thread_startup(&tid1); /* 删除线程 */ rt_thread_delete(tid);
}基本上在使用 RT-Thread Studio 开发的时候,我们大体上可以分为这几个步骤:创建项目、编写代码、构建项目、下载、调试、优化。所以总体感觉还是比较简单。
总结
RT-Thread Nano 具有非常多的优点。
- 代码足够简洁:Nano 不含 Scons 构建系统,不需要 Kconfig 以及 Env 配置工具,也去除了完整版特有的 device 框架和组件,仅是一个纯净的内核。
- 资源占用小:Nano 对 RAM 与 ROM 的开销非常小,在支持 semaphore 和 mailbox 特性,并运行两个线程 (main 线程 + idle 线程) 情况下,RAM 占用约 1K 左右,ROM 占用 4K 左右。
- 使用方便:Nano 在配置文件 rtconfig.h 中列出了内核中的所有宏定义,有些默认没有打开,如需使用,打开即可。具体的配置可见教程
除此之外,Nano 还有很多让人眼前一亮的特性,这里就不一一列举了。
感兴趣的伙伴们,赶紧行动起来吧👉https://edu.csdn.net/course/detail/22983