多臂老虎机问题
1.问题简介
多臂老虎机问题可以被看作简化版的强化学习问题,算是最简单的“和环境交互中的学习”的一种形式,不存在状态信息,只有动作和奖励。多臂老虎机中的探索与利用(exploration vs. exploitation)问题一直以来都是一个特别经典的问题,理解它能够帮助我们学习强化学习。
2.问题介绍
2.1问题定义
在多臂老虎机(multi-armed bandit,MAB)问题中,有一个拥有 K根拉杆的老虎机,拉动每一根拉杆都对应一个关于奖励的概率分布R。我们每次拉动其中一根拉杆,就可以从该拉杆对应的奖励概率分布中获得一个奖励 。我们在各根拉杆的奖励概率分布未知的情况下,从头开始尝试,目标是在操作 T次拉杆后获得尽可能高的累积奖励。由于奖励的概率分布是未知的,因此我们需要在“探索拉杆的获奖概率”和“根据经验选择获奖最多的拉杆”中进行权衡。
2.2形式化描述
多臂老虎机问题可以表示为一个元组,其中:
- A为动作集合,其中一个动作表示拉动一个拉杆。若多臂老虎机一共有K根拉杆,那动作空间就是集合
,我们用
表示任意一个动作;
- R为奖励概率分布,拉动每一根拉杆的动作a都对应一个奖励概率分布R(r|a),拉动不同拉杆的奖励分布通常是不同的。
假设每个时间步只能拉动一个拉杆,多臂老虎机的目标为最大化一段时间步T内累积的奖励:
其中表示在第t时间步拉动某一拉杆的动作,
表示动作
获得的奖励。
对于每一个动作a,定义其期望奖励为:
![]()
于是,至少存在一根拉杆,它的期望奖励不小于拉动其他任意一根拉杆,我们将该最优期望奖励表示为:
![]()
懊悔(regret)定义为拉动当前拉杆的动作a与最优拉杆的期望奖励差,即 :
累积懊悔(cumulative regret)即操作 T次拉杆后累积的懊悔总量,对于一次完整的T步决策,累积懊悔为 :
MAB 问题的目标为最大化累积奖励,等价于最小化累积懊悔。
为了知道拉动哪一根拉杆能获得更高的奖励,我们需要估计拉动这根拉杆的期望奖励。由于只拉动一次拉杆获得的奖励存在随机性,所以需要多次拉动一根拉杆,然后计算得到的多次奖励的期望,其算法流程如下所示:
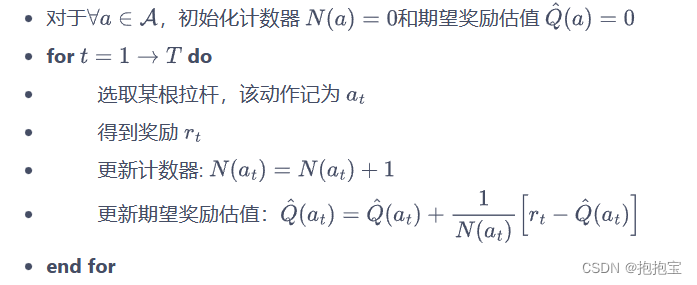
以上 for 循环中的第四步如此更新估值,是因为这样可以进行增量式的期望更新,为什么不按照常规方法将所有数求和再除以次数呢?具体原因如下:
因为如果将所有数求和再除以次数,其缺点是每次更新的时间复杂度和空间复杂度均为 O(n)。而采用增量式更新,时间复杂度和空间复杂度均为O(1) 。
3. 代码实现
以下代码来实现一个拉杆数为 10 的多臂老虎机。其中拉动每根拉杆的奖励服从伯努利分布(Bernoulli distribution),即每次拉下拉杆有P的概率获得的奖励为 1,有1-P的概率获得的奖励为 0。奖励为 1 代表获奖,奖励为 0 代表没有获奖。
# 导入需要使用的库,其中numpy是支持数组和矩阵运算的科学计算库,而matplotlib是绘图库
import numpy as np
import matplotlib.pyplot as pltclass BernoulliBandit:""" 伯努利多臂老虎机,输入K表示拉杆个数 """def __init__(self, K):self.probs = np.random.uniform(size=K) # 随机生成K个0~1的数,作为拉动每根拉杆的获奖# 概率self.best_idx = np.argmax(self.probs) # 获奖概率最大的拉杆self.best_prob = self.probs[self.best_idx] # 最大的获奖概率self.K = Kdef step(self, k):# 当玩家选择了k号拉杆后,根据拉动该老虎机的k号拉杆获得奖励的概率返回1(获奖)或0(未# 获奖)if np.random.rand() < self.probs[k]:return 1else:return 0np.random.seed(1) # 设定随机种子,使实验具有可重复性
K = 10
bandit_10_arm = BernoulliBandit(K)
print("随机生成了一个%d臂伯努利老虎机" % K)
print("获奖概率最大的拉杆为%d号,其获奖概率为%.4f" %(bandit_10_arm.best_idx, bandit_10_arm.best_prob))接下来我们用一个 Solver 基础类来实现上述的多臂老虎机的求解方案。需要实现下列函数功能:根据策略选择动作、根据动作获取奖励、更新期望奖励估值、更新累积懊悔和计数。在下面的 MAB 算法基本框架中,我们将根据策略选择动作、根据动作获取奖励和更新期望奖励估值放在 run_one_step() 函数中,由每个继承 Solver 类的策略具体实现。而更新累积懊悔和计数则直接放在主循环 run() 中。
class Solver:""" 多臂老虎机算法基本框架 """def __init__(self, bandit):self.bandit = banditself.counts = np.zeros(self.bandit.K) # 每根拉杆的尝试次数self.regret = 0. # 当前步的累积懊悔self.actions = [] # 维护一个列表,记录每一步的动作self.regrets = [] # 维护一个列表,记录每一步的累积懊悔def update_regret(self, k):# 计算累积懊悔并保存,k为本次动作选择的拉杆的编号self.regret += self.bandit.best_prob - self.bandit.probs[k]self.regrets.append(self.regret)def run_one_step(self):# 返回当前动作选择哪一根拉杆,由每个具体的策略实现raise NotImplementedErrordef run(self, num_steps):# 运行一定次数,num_steps为总运行次数for _ in range(num_steps):k = self.run_one_step()self.counts[k] += 1self.actions.append(k)self.update_regret(k)