【habitat学习二】Habitat-Lab 快速入门指南(Quickstart)详解
1. 页面概述
Quickstart是Habitat-Lab 官方文档中的快速入门指南,专门针对希望快速了解和使用 Habitat 平台进行具身 AI(Embodied AI)研究的用户。页面内容主要分为两部分:Habitat 平台概述和一个具体的 PointNav 任务示例。本文将对页面内容进行极其详尽的解析,不遗漏任何技术细节、代码实现和使用说明。
2. Habitat 平台概述
2.1 Habitat 的定义与组成
页面开篇明确定义了 Habitat 是一个专为具身 AI 研究设计的平台,由两个核心组件构成:
2.1.1 Habitat-Sim
- 性质:灵活、高性能的 3D 模拟器
- 核心功能:
- 可配置的智能体(Agents)
- 多种传感器支持(RGB、深度、语义等)
- 通用 3D 数据集处理能力
- 内置对 MatterPort3D、Gibson 等主流数据集的支持
- 技术定位:底层物理和图形渲染引擎
- 代码库链接:文档中明确标注了
[github-repo]标记,指向 Habitat-Sim 的 GitHub 仓库(https://github.com/facebookresearch/habitat-sim)
2.1.2 Habitat Lab
- 性质:模块化的高级库
- 核心功能:
- 定义具身 AI 任务(导航、指令跟随、问答等)
- 配置具身智能体(物理形态、传感器、能力)
- 训练智能体(通过模仿学习、强化学习或传统方法如 SLAM)
- 使用标准指标评估智能体性能
- 技术定位:任务定义、训练和评估的高层框架
- 代码库链接:同样标注了
[github-repo]标记,指向 Habitat-Lab 的 GitHub 仓库(https://github.com/facebookresearch/habitat-lab)
2.2 安装要求
- 明确说明:安装 Habitat-Sim 和 Habitat-Lab 需遵循特定安装说明(页面提供了"follow instructions here"链接,指向完整的安装指南)
- 数据要求:需要下载场景数据(安装说明中提供具体步骤)
- 额外依赖:示例代码需要 OpenCV(通过
pip install opencv-python安装)
3. 示例详解:PointNav 任务
3.1 任务定义
- 任务名称:PointNav(点目标导航任务)
- 任务目标:智能体需从源位置导航到目标位置
- 本示例特点:
- 智能体由用户(操作者)亲自控制
- 用户通过键盘按键在环境中移动
- 提供实时视觉反馈和导航信息
3.2 运行前提条件
页面明确列出运行此示例的所有必要条件:
- Habitat-Sim 成功安装:提供物理模拟和渲染能力
- Habitat-Lab 成功安装:提供任务框架和环境接口
- 场景数据已下载:包括 MatterPort3D 或 Gibson 等 3D 场景
- OpenCV 安装:通过
pip install opencv-python安装,用于图像显示
3.3 完整代码解析
3.3.1 导入库
import habitat
from habitat.sims.habitat_simulator.actions import HabitatSimActions
import cv2
- habitat:主模块,提供环境创建和管理功能
- HabitatSimActions:从模拟器中导入预定义动作(关键动作枚举)
- cv2:OpenCV 库,用于图像显示和处理
3.3.2 定义按键常量
FORWARD_KEY="w"
LEFT_KEY="a"
RIGHT_KEY="d"
FINISH="f"
- 设计目的:将按键映射到具体动作,提高代码可读性
- 按键映射:
- “w” → 前进(Forward)
- “a” → 左转(Left)
- “d” → 右转(Right)
- “f” → 结束任务(Finish)
3.3.3 图像格式转换函数
def transform_rgb_bgr(image):return image[:, :, [2, 1, 0]]
- 功能:将 RGB 格式图像转换为 BGR 格式
- 技术原因:Habitat 使用 RGB 格式,而 OpenCV 默认使用 BGR 格式
- 实现细节:通过 NumPy 数组切片操作
[2, 1, 0]交换颜色通道顺序 - 关键性:若省略此步骤,图像颜色会显示异常(红色和蓝色通道互换)
3.3.4 主函数:example()
def example():env = habitat.Env(config=habitat.get_config("benchmark/nav/pointnav/pointnav_habitat_test.yaml"))print("Environment creation successful")
- 环境创建:
- 使用
habitat.Env初始化环境 - 配置文件路径:
benchmark/nav/pointnav/pointnav_habitat_test.yaml - 关键细节:该配置文件定义了 PointNav 任务的所有参数,包括:
- 使用的场景
- 智能体传感器配置
- 任务成功条件
- 最大步数限制等
- 使用
3.3.4.1 初始化与重置环境
observations = env.reset()
print("Destination, distance: {:3f}, theta(radians): {:.2f}".format(observations["pointgoal_with_gps_compass"][0],observations["pointgoal_with_gps_compass"][1]))
cv2.imshow("RGB", transform_rgb_bgr(observations["rgb"]))
- env.reset():
- 重置环境到新 episode 的初始状态
- 返回初始观察值(observations 字典)
- 观察字典内容:
pointgoal_with_gps_compass:目标点的极坐标表示- 索引 0:到目标的欧氏距离(米)
- 索引 1:到目标的角度(弧度,相对于智能体朝向)
rgb:当前视角的 RGB 图像(H×W×3 numpy 数组)
- 输出信息:
- 精确打印距离(3位小数)和角度(2位小数)
- 显示 RGB 图像窗口,标题为 “RGB”
3.3.4.2 交互循环
print("Agent stepping around inside environment.")
count_steps = 0
while not env.episode_over:keystroke = cv2.waitKey(0)# ... [按键处理] ...observations = env.step(action)count_steps += 1# ... [更新显示] ...
- 循环条件:
while not env.episode_overenv.episode_over:布尔值,表示当前 episode 是否结束- 结束条件包括:
- 智能体执行 STOP 动作
- 达到最大步数限制(默认 500 步)
- 达到任务成功/失败条件
- 按键等待:
cv2.waitKey(0)- 参数 0 表示无限期等待按键
- 返回按键的 ASCII 码值
- 步数计数器:
count_steps跟踪已执行的动作数量
3.3.4.3 按键处理逻辑
if keystroke == ord(FORWARD_KEY):action = HabitatSimActions.move_forwardprint("action: FORWARD")
elif keystroke == ord(LEFT_KEY):action = HabitatSimActions.turn_leftprint("action: LEFT")
elif keystroke == ord(RIGHT_KEY):action = HabitatSimActions.turn_rightprint("action: RIGHT")
elif keystroke == ord(FINISH):action = HabitatSimActions.stopprint("action: FINISH")
else:print("INVALID KEY")continue
- 按键检测:使用
ord()将字符常量转换为 ASCII 码进行比较 - 动作映射:
HabitatSimActions.move_forward:向前移动固定距离(默认 0.25 米)HabitatSimActions.turn_left:向左旋转固定角度(默认 10 度)HabitatSimActions.turn_right:向右旋转固定角度(默认 10 度)HabitatSimActions.stop:停止并结束 episode
- 错误处理:无效按键会打印 “INVALID KEY” 并跳过本次循环
3.3.4.4 执行动作与更新显示
observations = env.step(action)
count_steps += 1
print("Destination, distance: {:3f}, theta(radians): {:.2f}".format(observations["pointgoal_with_gps_compass"][0],observations["pointgoal_with_gps_compass"][1]))
cv2.imshow("RGB", transform_rgb_bgr(observations["rgb"]))
- env.step(action):
- 执行指定动作
- 返回新的观察值字典
- 更新内部状态(位置、朝向等)
- 实时反馈:
- 更新打印目标距离和角度
- 更新显示当前视角的 RGB 图像
3.3.4.5 任务完成评估
print("Episode finished after {} steps.".format(count_steps))
if (action == HabitatSimActions.stop and observations["pointgoal_with_gps_compass"][0] < 0.2):print("you successfully navigated to destination point")
else:print("your navigation was unsuccessful")
- 成功条件:
- 执行了 STOP 动作(
action == HabitatSimActions.stop) - 当前到目标的距离小于 0.2 米(
observations["pointgoal_with_gps_compass"][0] < 0.2)
- 执行了 STOP 动作(
- 失败条件:
- 未执行 STOP 动作而 episode 结束(如达到最大步数)
- 执行 STOP 动作但距离目标 ≥ 0.2 米
- 步数报告:显示完成 episode 所用的总步数
3.3.4.6 主程序入口
if __name__ == "__main__":example()
- 标准 Python 惯用写法:确保模块被直接运行时才执行 example 函数
- 可导入性:允许其他脚本导入此文件而不立即执行
3.4 运行说明与行为细节
页面提供了极其详细的运行说明:
3.4.1 控制方式
- W 键:前进(move forward)
- A 键:左转(turn left)
- D 键:右转(turn right)
- F 键:停止并结束任务(stop and finish)
3.4.2 终端输出信息
- 目标信息格式:
Destination, distance: {:3f}, theta(radians): {:.2f}- 距离:以米为单位,3位小数精度
- 角度:以弧度为单位,2位小数精度
- 角度定义:从智能体正前方开始测量的偏角(0 弧度表示目标在正前方)
3.4.3 成功与失败条件
- 成功条件:
- 距离目标 < 0.2 米
- 主动按下 F 键执行 STOP 动作
- 终端显示:“you successfully navigated to destination point”
- 失败条件(任一满足即失败):
- 按下 F 键但距离目标 ≥ 0.2 米
- 未主动停止,但达到最大步数限制(500 步)
- 终端显示:“your navigation was unsuccessful”
3.4.4 环境限制
- 最大步数:500 步(硬编码在配置文件中)
- 距离阈值:0.2 米(任务成功判定阈值)
- 旋转角度:每次 10 度(默认配置)
- 移动距离:每次 0.25 米(默认配置)
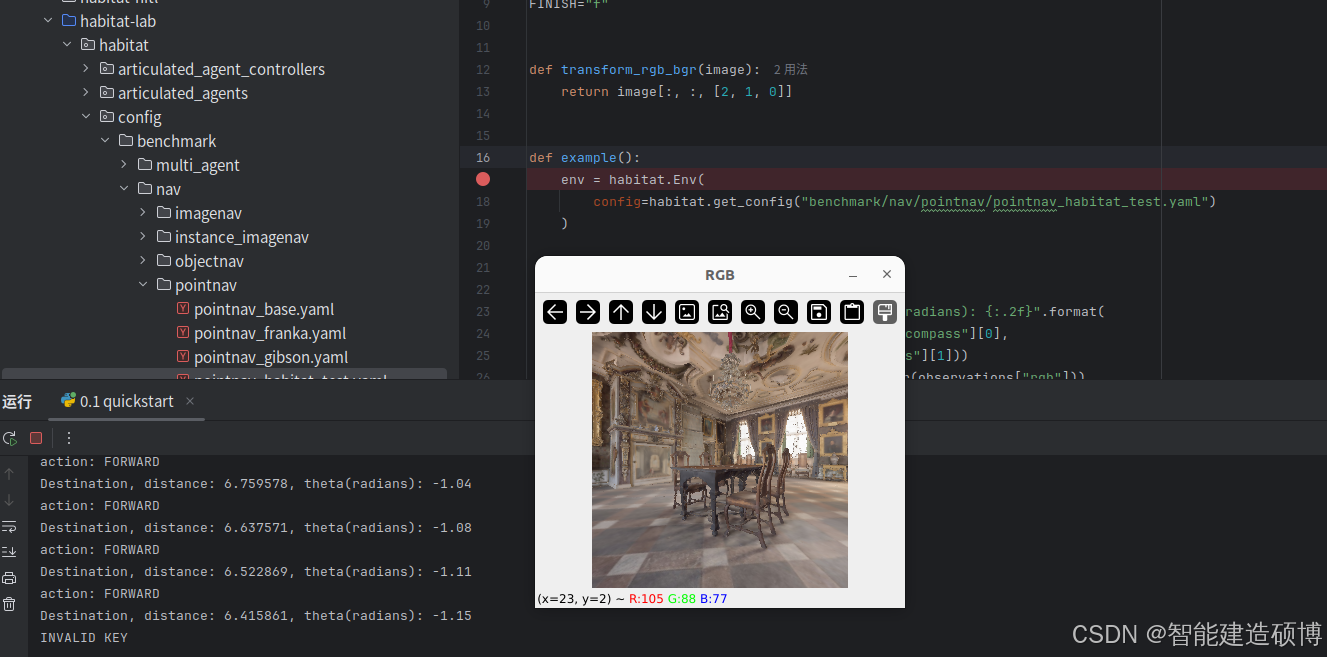
3.5 示例输出可视化
页面包含一张截图(quickstart.png),展示了:
- 左侧窗口:RGB 视图,显示智能体当前视角
- 右侧终端:
- 初始目标信息:距离和角度
- 用户操作记录("action: FORWARD"等)
- 最终任务结果(成功/失败信息)
- 交互过程:清晰展示了从开始到结束的完整交互流程
4. 技术细节深度解析
4.1 配置文件路径分析
- 完整路径:
benchmark/nav/pointnav/pointnav_habitat_test.yaml - 目录结构含义:
benchmark/:基准测试配置nav/:导航任务类别pointnav/:点目标导航具体任务pointnav_habitat_test.yaml:测试用配置文件
- 配置内容:该文件定义了:
- 使用的场景数据集
- 智能体传感器配置(默认包含 RGB 传感器)
- 任务参数(成功距离阈值、最大步数等)
- 模拟器参数(物理特性、渲染质量等)
4.2 观察空间结构
- pointgoal_with_gps_compass:
- 2 维向量:[距离, 角度]
- 距离:欧氏距离(米),范围 [0, ∞)
- 角度:弧度值,范围 [-π, π],0 表示正前方
- 技术实现:结合 GPS(位置)和指南针(朝向)信息计算
- rgb:
- 3D NumPy 数组:形状为 (H, W, 3)
- 数据类型:uint8(0-255 范围)
- 颜色顺序:RGB(与 OpenCV 的 BGR 相反)
4.3 动作空间详解
- move_forward:
- 移动距离:默认 0.25 米
- 物理约束:受场景碰撞检测限制
- 失败处理:若前方有障碍物,移动会被阻止
- turn_left/turn_right:
- 旋转角度:默认 10 度(π/18 弧度)
- 旋转中心:智能体位置
- 无碰撞检测(纯朝向变化)
4.4 环境生命周期
- 初始化:
habitat.Env(config=...)加载配置 - 重置:
env.reset()创建新 episode,返回初始观察 - 交互:循环执行
env.step(action)直到 episode 结束 - 终止:
env.episode_over变为 True,结束循环 - 资源释放:Python 垃圾回收自动处理(Habitat 会正确清理模拟器资源)
4.5 错误处理机制
- 无效按键:打印 “INVALID KEY” 并继续等待
- 边界条件:
- 移动到场景边界:自动停止(碰撞检测)
- 旋转超过 360 度:角度值自动归一化到 [-π, π]
- 异常处理:示例代码未显式处理异常,但 Habitat 内部有完善的错误检查
5. 实践建议与注意事项
5.1 常见问题排查
- 场景未加载:
- 现象:环境创建失败或黑屏
- 解决:确认场景数据已下载到正确路径
- 图像颜色异常:
- 现象:红色和蓝色通道互换
- 解决:确保使用
transform_rgb_bgr函数
- 按键无响应:
- 现象:OpenCV 窗口无焦点
- 解决:点击 OpenCV 窗口使其获得焦点
5.2 参数调整建议
- 调整移动距离:修改配置文件中的
SIMULATOR.ACTION_SPACE_CONFIG - 更改传感器:在配置文件中添加/修改
SIMULATOR.AGENT_0.SENSORS - 修改成功阈值:调整
TASK.SUCCESS_DISTANCE参数
5.3 扩展示例
- 添加深度传感器:在配置文件中添加
"DepthSensor" - 添加语义传感器:需确保场景有语义标注,添加
"SemanticSensor" - 自动导航代理:替换键盘控制为简单算法(如向目标直线移动)
6. 与 Habitat 生态系统的关联
6.1 配置系统集成
- 该示例直接使用 Habitat 的 YAML 配置系统
- 配置文件继承自 Habitat 的标准任务配置
- 支持通过命令行覆盖配置参数
6.2 与 Habitat-Sim 的交互
HabitatSimActions直接映射到 Habitat-Sim 的底层动作- 观察数据(RGB 图像)由 Habitat-Sim 渲染生成
- 物理模拟和碰撞检测由 Habitat-Sim 处理
6.3 评估指标基础
- 此示例中使用的
pointgoal_with_gps_compass是更复杂评估指标(如 SPL)的基础 - 成功条件(<0.2m)与 Habitat Challenge 标准一致
7. 教育价值与研究意义
7.1 教学价值
- 直观理解具身 AI:用户亲自体验导航挑战
- 观察-动作循环:清晰展示感知-决策-行动闭环
- 空间推理训练:理解距离、角度与导航的关系
7.2 研究基础
- 基准测试起点:此示例是 PointNav 基准测试的基础
- 算法开发平台:可扩展为自动化代理的测试环境
- 参数敏感性分析:可研究不同成功阈值对性能的影响
8. 技术限制与注意事项
8.1 性能限制
- 实时性:依赖硬件性能,复杂场景可能导致帧率下降
- 内存使用:高分辨率传感器会增加内存消耗
- 物理精度:简化物理模型可能与现实有差异
8.2 使用限制
- 单智能体:此示例仅支持一个智能体
- 预定义动作:仅支持离散动作(前进、转向)
- 固定场景:测试配置使用固定场景(van-gogh-room)
8.3 开发注意事项
- 配置优先:应优先通过配置文件而非硬编码修改参数
- 资源管理:长时间运行需注意模拟器资源释放
- 跨平台差异:不同操作系统下 OpenCV 行为可能略有不同
通过此指南,研究人员和开发者可以在 5 分钟内:
- 安装必要依赖
- 运行第一个具身 AI 环境
- 亲身体验导航任务挑战
- 理解 Habitat 的核心工作流程