STM32 软件I2C读写MPU6050
本系统借助 STM32 单片机,搭配 MPU6050 六轴传感器(集成加速度计与陀螺仪),通过 I2C 通信采集传感器数据,实时获取设备的加速度(AX、AY、AZ )和角速度(GX、GY、GZ )信息,并在 OLED 显示屏上显示传感器 ID 及六轴数据,实现对设备运动姿态的检测与数据可视化 。
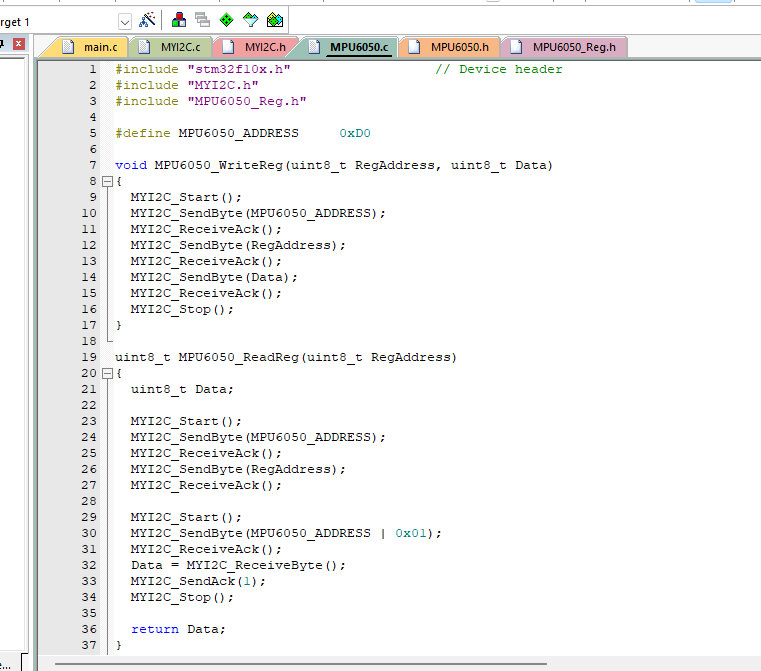
MPU6050_WriteReg 、 MPU6050_ReadReg 实现对 MPU6050 寄存器的读写
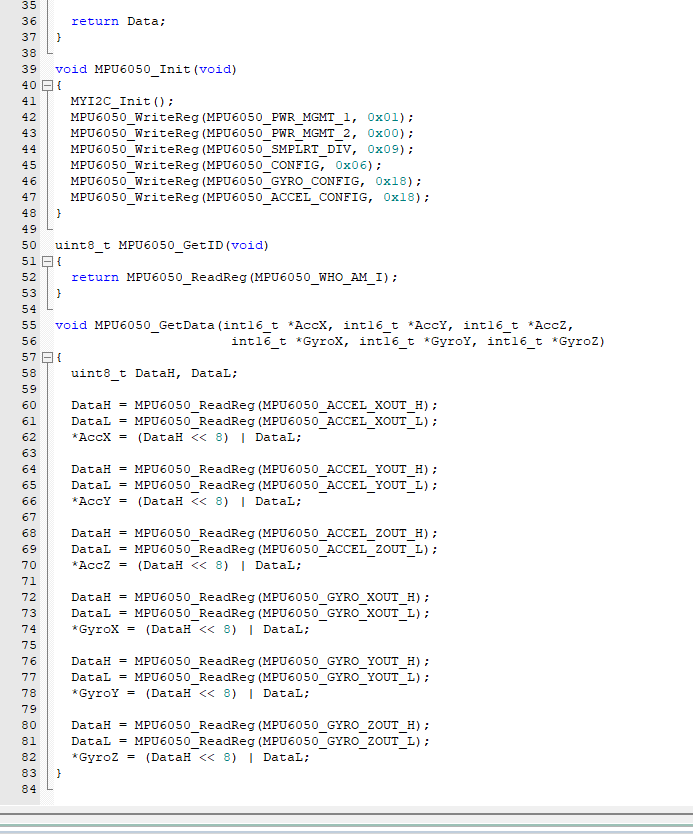
MPU6050_Init 完成传感器初始化配置
MPU6050_GetID 获取传感器 ID 用于设备校验
MPU6050_GetData 读取加速度和角速度的原始数据。
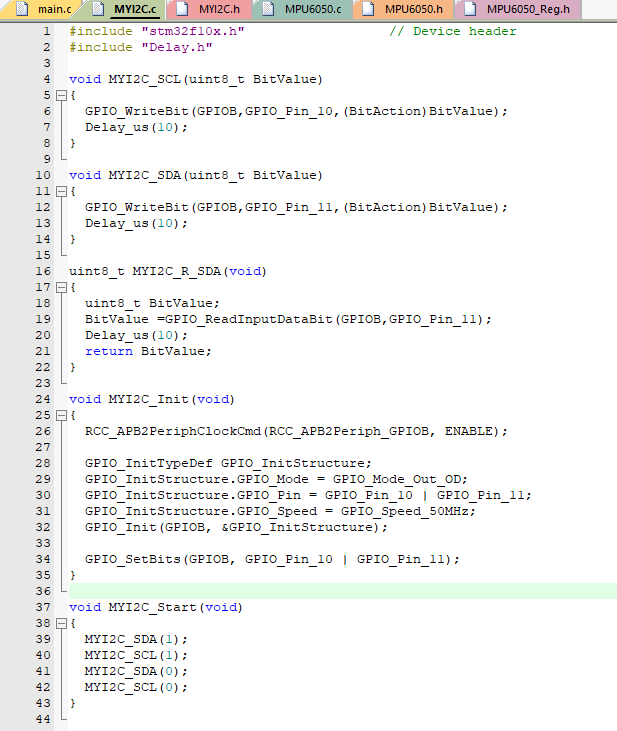
实现 I2C 总线的启动( MYI2C_Start )、停止( MYI2C_Stop )、数据发送( MYI2C_SendByte )、接收( MYI2C_ReceiveByte )及应答( MYI2C_SendAck 、 MYI2C_ReceiveAck )等操作