【P21】OpenCV Python——RGB和BGR,HSV和HSL颜色空间,及VScode中报错问题解决
P21
- 1 RGB和BGR
- 2 HSV和HSL,YUV
- 2.1 HSV
- 2.1. 色调H
- 2.1.2 饱和度S
- 2.1.3 明度V
- 2.2 HSL
- 2.3 YUV
- 3 颜色空间转换实战
- 4 VScode中报错问题
- 5 Windows 下 VScode 路径格式(VScode很强大,路径格式写法自由多样)
RGB/BGR人眼识别的颜色 ;
HSV/HSB/HSL主要是适用于硬件;
YUV视频用于视频存储;
1 RGB和BGR
HSV和HSB表示一个意思,V(value)和B(bright)都表示明度;
YUV视频领域(节省存储空间)


2 HSV和HSL,YUV
2.1 HSV
2.1. 色调H
用角度度量,取值范围为0°~360°,从红色开始按逆时针方向计算,红色为0°,绿色为120°,蓝色为240°。它们的补色是:黄色为60°,青色为180°,紫色为300°;圆柱,一圈不同未知的颜色。
2.1.2 饱和度S
饱和度S表示颜色接近光谱色的程度。一种颜色,可以看成是某种光谱色与白色混合的结果。其中光谱色所占的比例愈大,颜色接近光谱色的程度就愈高,颜色的饱和度也就愈高。饱和度高,颜色则深而艳。光谱色的白光成分为0,饱和度达到最高。通常取值范围为0%~100%,值越大,颜色越饱和。越接近边缘颜色越纯。
2.1.3 明度V
明度表示颜色明亮的程度,对于光源色,明度值与发光体的光亮度有关;对于物体色,此值和物体的透射比或反射比有关。通常取值范围为0%(黑)到100%(白)。竖直方向,下面暗,越往上越亮。

-
V: 竖直方向表示明度,决定颜色空间中颜色的明暗程度,明度越高,表示颜色越明亮,范围是 0-100%。明度为0表示纯黑色(此时颜色最暗)。
-
明度减小,就是往光谱色中添加黑色,光谱色所占的比例也在减小,明度减为0,表示光谱色所占的比例为零,导致整个颜色呈现黑色。
-
H: 在
Hue一定的情况下,饱和度减小,就是往光谱色中添加白色,光谱色所占的比例也在减小,饱和度减为0,表示光谱色所占的比例为零,导致整个颜色呈现白色。

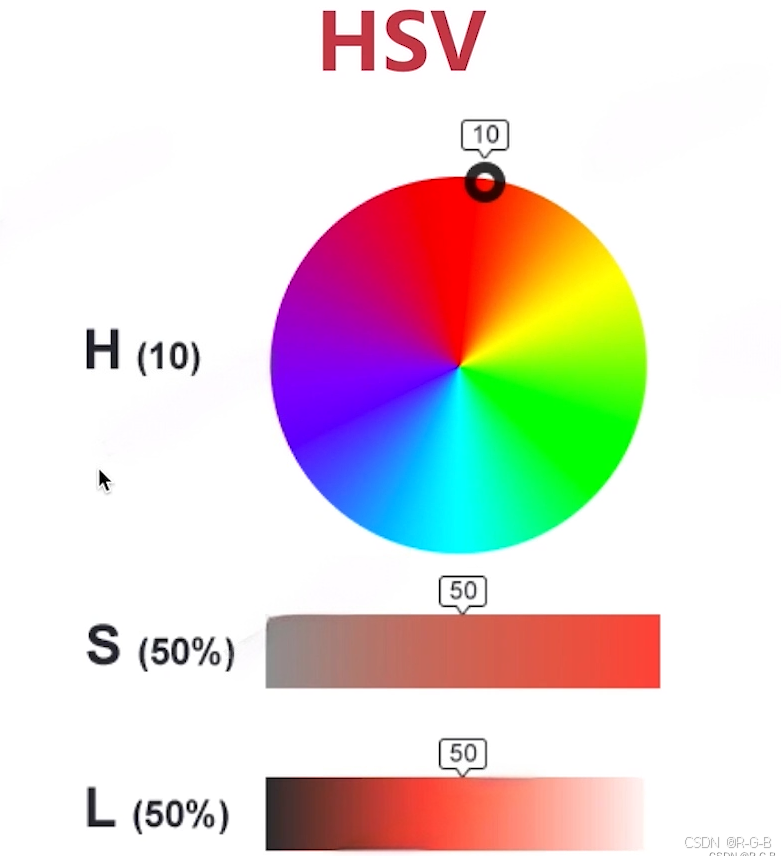
以红色为例:
- 10度处,色度H,红色;
- 饱和度S,中间灰色,越往边缘越红;
- 明度V,最下面黑色,越往上越亮;

当 ,RGB三个颜色都值不好判断颜色;
HSV可以通过色相范围判断颜色;

2.2 HSL
HSL竖直方向是亮度,最上面最亮,纯白

2.3 YUV
YUV主要用于视频,简单了解一下


3 颜色空间转换实战
import cv2def callback():passimg=cv2.imread('E:\\Program_Py\\dog.jpeg')#显示原始图
cv2.namedWindow('img',cv2.WINDOW_NORMAL)
cv2.imshow('img',img)cv2.namedWindow('color',cv2.WINDOW_NORMAL)colorspaces=[cv2.COLOR_BGR2RGBA,cv2.COLOR_BGR2BGRA,cv2.COLOR_BGR2GRAY,cv2.COLOR_BGR2HSV_FULL,cv2.COLOR_BGR2YUV]cv2.createTrackbar('curcolor','color',0,len(colorspaces),callback)#value代表滑块的位置,起始位置0while True:index=cv2.getTrackbarPos('curcolor','color')cvt_img=cv2.cvtColor(img,colorspaces[index])cv2.imshow('color',cvt_img)key=cv2.waitKey(1)if key & 0xff ==ord('q'):breakcv2.destroyAllWindows()
原图

COLOR_BGR2RGB

COLOR_BGR2BGR


COLOR_BGR2GRAY

COLOR_BGR2HSV

COLOR_BGR2YUV
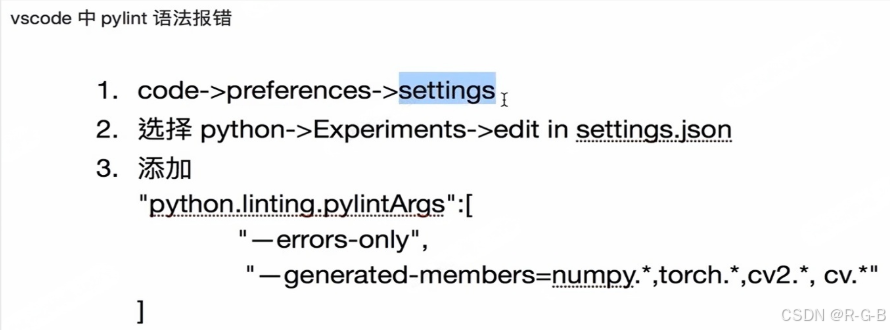
4 VScode中报错问题
5 Windows 下 VScode 路径格式(VScode很强大,路径格式写法自由多样)
VScode下Windowsx下路径
img1=cv2.imread('E:\\Program_Py\\dog.jpeg')
img2=cv2.imread('.\\hello.jpeg')
img3=cv2.imread("E:\\Program_Py\\map1.png")
img4=cv2.imread(".\\chess.png")img5=cv2.imread('E:/Program_Py/map2.png')
img6=cv2.imread('./RMB.jpeg')
img7=cv2.imread("E:/Program_Py/lena.png")
img8=cv2.imread("./smallcat1.jpeg")img9=cv2.imread('E:\Program_Py\left_01.png')
不得不说,VScode还是强大,路径格式怎么写都对;
cv2.imshow('img1',img1)
cv2.imshow('img2',img2)
cv2.imshow('img3',img3)
cv2.imshow('img4',img4)
cv2.imshow('img5',img5)
cv2.imshow('img6',img6)
cv2.imshow('img7',img7)
cv2.imshow('img8',img8)
cv2.imshow('img9',img9)key=cv2.waitKey()
mac或 Linux下路径(更多的没有去验证)
img=cv2.imread("C:/Users/pvt/Desktop/test.png")