opencv:图像轮廓检测与轮廓近似(附代码)
目录
图像轮廓
cv2.findContours(img, mode, method)
绘制轮廓
轮廓特征与近似
轮廓特征
轮廓近似
轮廓近似原理
opencv 实现轮廓近似
轮廓外接矩形
轮廓外接圆
图像轮廓
cv2.findContours(img, mode, method)
mode:轮廓检索模式(通常使用第四个模式)
-
RETR_EXTERNAL: 只检索最外面的轮廓;
-
RETR_LIST: 检索所有的轮廓,并将其保存到一条链表当中;
-
RETR_CCOMP: 检索所有的轮廓,并将他们组织为两层:顶层是各部分的外部边界,第二层是空洞的边界;
-
RETR_TREE: 检索所有的轮廓,并重构嵌套轮廓的整个层次;
method:轮廓逼近方法
-
CHAIN_APPROX_NONE: 以Freeman链码的方式输出轮廓,所有其他方法输出多边形(顶点的序列)。
-
CHAIN_APPROX_SIMPLE: 压缩水平的、垂直的和斜的部分,也就是,函数只保留他们的终点部分。
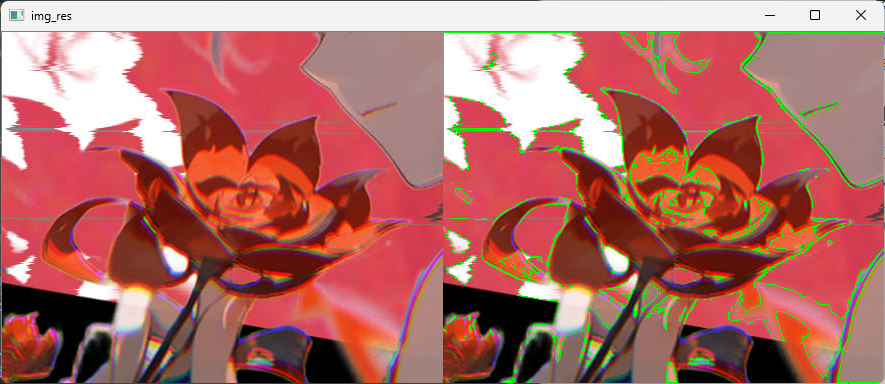
绘制轮廓
需要注意的是,当我们要进行轮廓检测时,为了更高的准确率,使用黑白二值图像。
轮廓特征与近似
轮廓特征
cnt = contours[0]
# 面积
cv2.contourArea(cnt)
# 周长,True 表示闭合的
cv2.arcLength(cnt, True)轮廓近似
轮廓近似原理
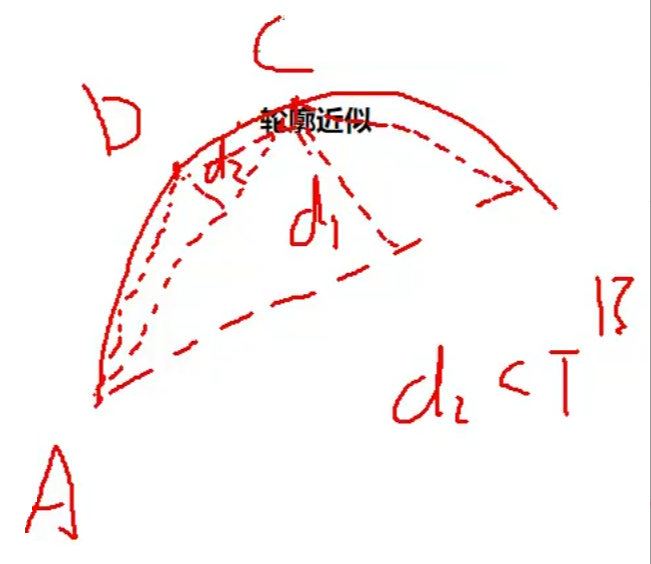
如上图,设定一个阈值 T,原曲线 AB,曲线 AB 上找一点C距离AB直线最远,距离为d1,如果d1 < T,则曲线AB可以近似为直线 AB,如果d1 > T,则连接直线 AC 与 直线 CB,从曲线AC上找一点 D 距离直线 AC 最远,距离为 d2,如果 d2 < T,则曲线 AC 可以近似为直线 AC,否则继续连线。
整个过程有点类似于“二分法”。只要曲线上最远一点小于阈值,则两点取直线代替曲线。
通过调整阈值,我们就可以做到轮廓近似:(中间和右边为不同阈值下的轮廓近似)

opencv 实现轮廓近似
img = cv2.imread("img1.jpg", cv2.IMREAD_COLOR)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
# binary 为二值图像, contours 为轮廓信息的集合, hierarchy 为轮廓层级信息
binary, contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)
# 获取你想要进行近似操作的轮廓
cnt = contours[0]
# 一般阈值取百分比轮廓周长
epsilon = 0.1 * cv2.arcLength(cnt, True)
# 轮廓近似化
approx = cv2.approxPolyDP(cnt, epsilon, True)
# 需要注意copy,绘制轮廓函数会改变传入原图
draw_img = img.copy()
# 传入绘制图像,轮廓,轮廓索引(-1表示全部轮廓),线条颜色,线条宽度
res = cv2.drawContours(draw_img, approx, -1, (0, 255, 0), 1)cv2.imshow("res", res)
cv2.waitKey(0)
cv2.destroyAllWindows()原图:
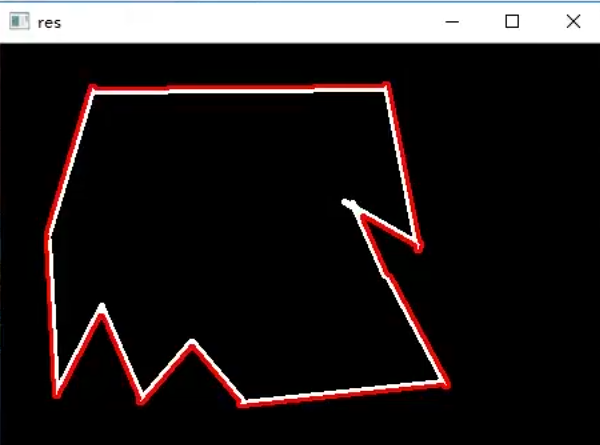
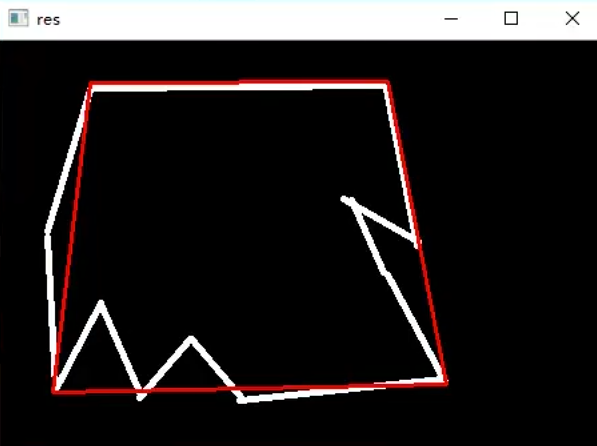
轮廓近似化后:
轮廓外接矩形
# 获取你想要进行近似操作的轮廓
cnt = contours[0]
# 轮廓外接矩形
x, y, w, h = cv2.boundingRect(cnt)
img = cv2.rectangle(img, (x, y), (x + w, y + h), (0, 255, 0), 2)
cv2.imshow("img", img)
cv2.waitKey(0)
cv2.destroyAllWindows()我们也可以算出轮廓面积与边界矩形的比:
area = cv2.contourArea(cnt)
x, y, w, h = cv2.boundingRect(cnt)
rect_area = w * h
extent = float(area) / rect_area
print("轮廓面积与边界矩形比",extent)轮廓外接圆
# 获取你想要进行近似操作的轮廓
cnt = contours[0]
# 轮廓外接圆
(x, y), radius = cv2.minEnclosingCircle(cnt)
center = (int(x), int(y)) # 圆心
radius = int(radius) # 半径
img = cv2.circle(img, center, radius, (0, 255, 0), 2)
cv2.imshow("img", img)
cv2.waitKey(0)
cv2.destroyAllWindows()