202506 电子学会青少年等级考试机器人四级器人理论真题
=========================================================================
更多内容和历年真题请查看网站:【试卷中心 -----> 电子学会 ----> 机器人技术 ----> 四级】
网站链接
青少年软件编程历年真题模拟题实时更新
=========================================================================
2025年6月 青少年等级考试机器人理论真题四级
第 1 题
通常情况下,Arduino UNO/Nano主控板的MCU工作频率是?( )
A:8KHz
B:16KHz
C:8MHz
D:16MHz
第 2 题
有关Arduino C程序的setup()函数,下列说法不正确的是?( )
A:setup()函数仅运行一次
B:setup()函数中一般放置初始化程序
C:setup()函数首先被运行
D:setup()函数中的程序会循环运行
第 3 题
Arduino UNO/Nano主控板,下列选项中,具有数字信号输入和输出功能以及模拟信号输入功能的引脚是?( )
A:引脚0
B:引脚1
C:引脚3
D:引脚A0
第 4 题
Arduino C语言中,十进制数的前缀是?( )
A:0b
B:0x
C:0
D:无前缀
第 5 题
整数024对应的十进制数是?( )
A:14
B:20
C:24
D:10100
第 6 题
Arduino UNO/Nano主控板,使用analogRead()函数读取模拟输入信号,当模拟输入引脚的输入电压为2.5V时,函数的返回值是 ?( )
A:0
B:255
C:511
D:1023
第 7 题
Arduino UNO/Nano主控板,使用digitalRead()函数读取数字输入信号,当引脚输入电压Vin的范围为1.5<Vin<3.5时,函数的返回值是 ?( )
A:0
B:1
C:255
D:不确定
第 8 题
如图所示电路,当光照强度增大时,下列选项中,关于电路中U2说法正确的是?( )
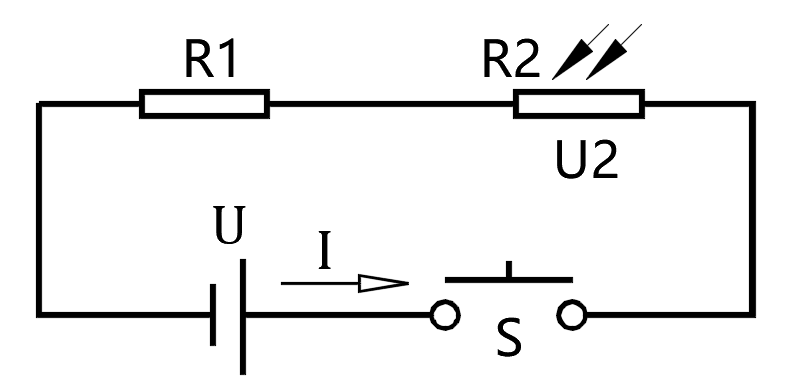
A:增大
B:减小
C:不变
D:没有规律,不能确定
第 9 题
Arduino UNO/Nano主控板,电路如下图所示,通过7引脚获取按键的返回值,下列选项中,关于引脚模式设置正确的是?( )
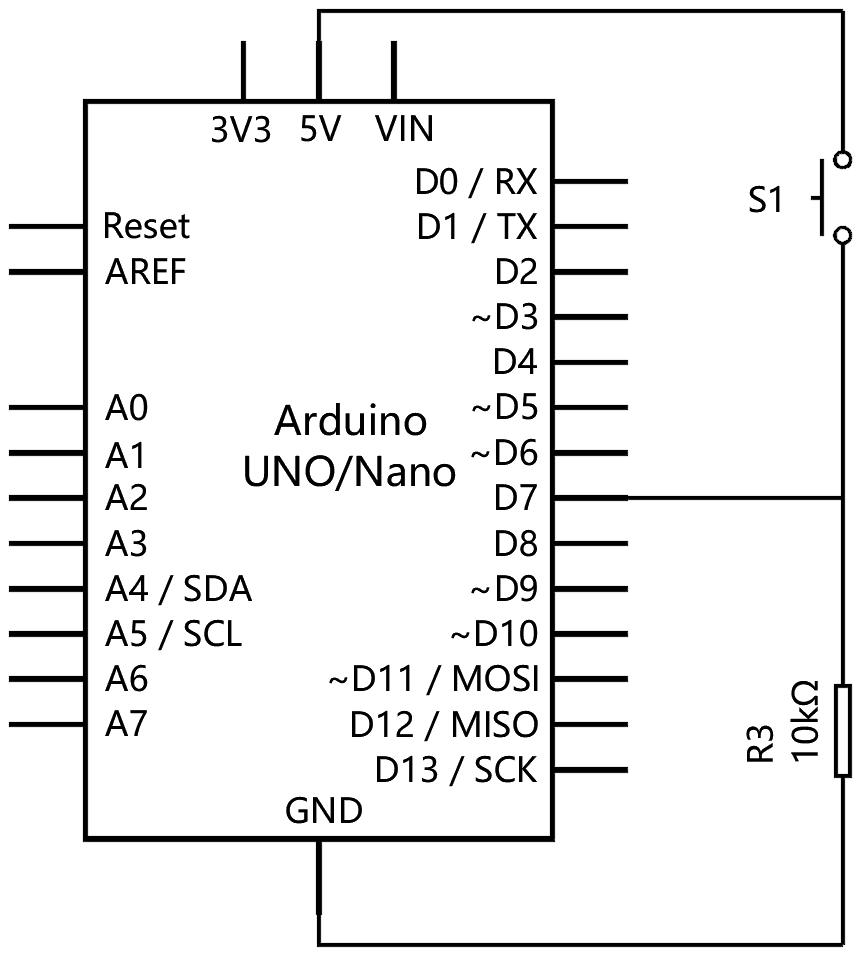
A:pinMode(7,INPUT)
B:pinMode(7,OUTPUT)
C:pinMode(7,INPUT_PULLUP)
D:pinMode(7,INPUT_PULLDOWN)
第 10 题
Arduino UNO/Nano主控板,电路如下图所示,通过7引脚获取按键的返回值,下列选项中,关于电路描述正确的是?( )
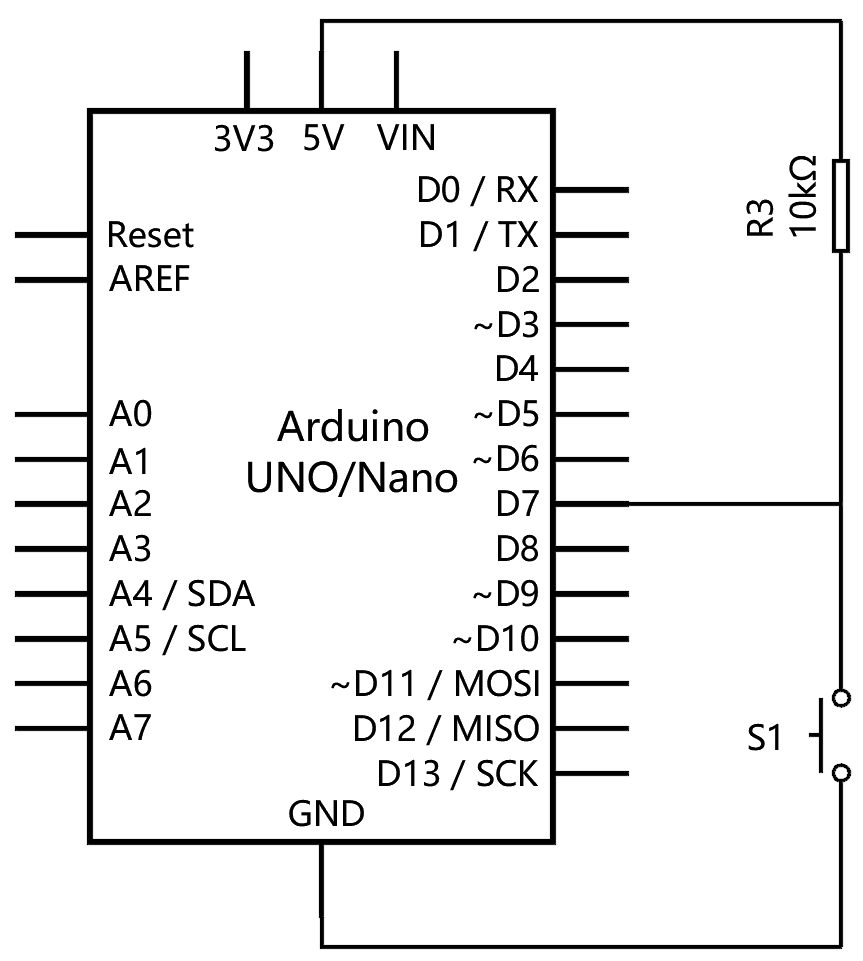
A:上拉电阻电路
B:下拉电阻电路
C:内部上拉电阻电路
D:上升沿电阻电路
第 11 题
下列选项中,浮点型所对应的描述符是?( )
A:int
B:byte
C:long
D:float
第 12 题
关于pulseIn(pin,val)函数,下列选项中,描述错误的是?( )
A:函数的功能是返回一个引脚的脉冲时长
B:参数pin是指进行脉冲计时的引脚
C:参数val是指脉冲的类型,为HIGH或LOW
D:函数返回脉冲时长的单位是毫秒
第 13 题
Arduino C语言,下列选项中符合命名规则的变量名是?( )
A:char
B:void
C:_btn3
D:case
第 14 题
Arduino C程序如下,当程序运行时,串口监视器输出结果是?( )
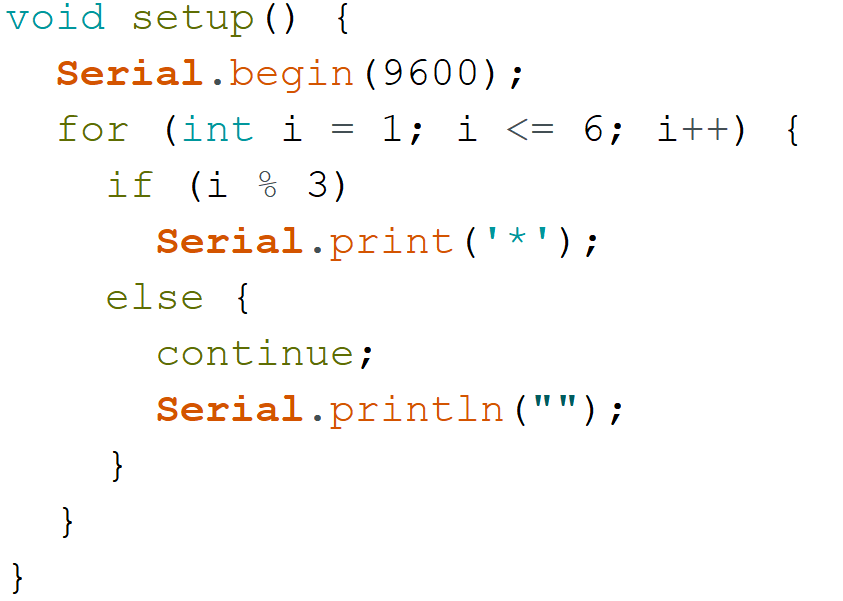
A:
****
B:
******
C:
**
**
D:
***
***
第 15 题
Arduino C程序如下,当程序运行时,串口监视器输出结果是?( )
A:*-#*-#
B:-#=*-#
C:*-#=*-
D:*#-*#-
=========================================================================
更多内容和历年真题请查看网站:【试卷中心 -----> 电子学会 ----> 机器人技术 ----> 四级】
网站链接
青少年软件编程历年真题模拟题实时更新
=========================================================================