小孙学变频学习笔记(十三)电动机参数的自动测量 矢量控制的转速反馈
目录
- 小孙学变频学习笔记(十三)
- 一、机械特性的改善
- 1.1 电动机参数的自动测量
- 圆图
- 1.2 矢量控制的转速反馈
- 无矢量反馈控制和有矢量反馈控制
- 附学习参考网址
- 欢迎大家有问题评论交流 (* ^ ω ^)
小孙学变频学习笔记(十三)
一、机械特性的改善
- 等效为直流电机的异步电机控制
1.1 电动机参数的自动测量
- 电动机本身的参数有两类
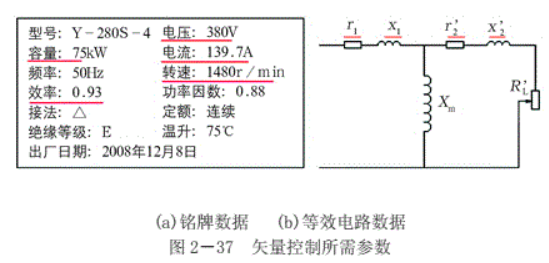
- 铭牌数据:主要是额定容量、额定电流、额定电压、额定转速、额定效率等。
- 等效电路数据:主要是定子绕组的电阻和漏磁电抗,转子等效电路的电阻和漏磁电抗以及空载电流等。这些数据变频器不会提供,但是可以通过变频器自学习获得,如下图所示。
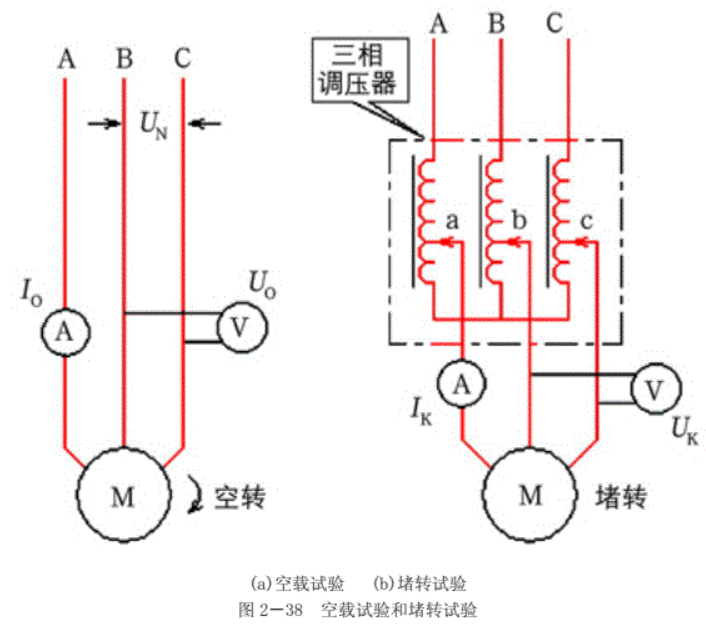
- 空载试验,就是加额定电压让电机空转,测出空载电压U0和电流I0
- 堵转试验(短路试验),把电动机的转子堵住(抱闸),定子绕组上施压15-25%的低电压,测量短路电压Uk和电流Ik
- 变频器的输出电压是可以通过改变脉冲的占空比调节的,所以不用调压器也可以进行堵转试验。
- 在变频器中会进行“圆图”计算,生成电压与电流的矢量关系,完成自学习。
- 自学习大致步骤是:
电动机脱离负载->输入电动机额定数据->变频器设置为自学习状态->按下运行键 - 电机一般会慢慢升速(到额定速度的一半),然后再慢慢减速到停止,持续1-2min
- 有时候电动机无法脱离负载,这时候就选择“静止自学习”,而不是“动态自学习”,不测空载电流了。空载电流一般是额定电流的40%,这样做会导致准确度较差一点
- 自学习还会被称为自整定,自动测量,自动对准,自动调谐等名称
圆图
- 变频器自学习中的 “圆图” 是电机参数测试过程中,电压与电流矢量关系的可视化曲线。由于电机的阻抗特性(感性负载),在特定条件下(如固定频率、变压测试),电压与电流的矢量轨迹会呈现近似圆形,因此称为 “圆图”
- 圆图的形状、对称性、半径等特征,直接反映了自学习获取的电机参数是否准确,具体体现在以下方面:
- 参数匹配度:
若电机参数准确,电压与电流的矢量关系会呈现规则的圆形(或对称的近似圆形),因为此时变频器计算的电机模型与实际电机特性一致,电压、电流的相位和幅值关系符合理论规律。
若参数偏差较大(如定子电阻测量值偏小、电感值误差大),圆图会出现变形(如椭圆、不规则图形),甚至出现明显的 “凹陷” 或 “偏移”。 - 电机状态判断:
圆图的完整性还能反映电机是否存在异常(如绕组短路、匝间故障等)。正常电机的圆图应连续、平滑;若存在故障,电流或电压信号会出现突变,导致圆图出现断点、毛刺或畸形。
- 参数匹配度:
1.2 矢量控制的转速反馈
- 现在已经基本不用测速发电机,广泛使用编码器来反馈速度。
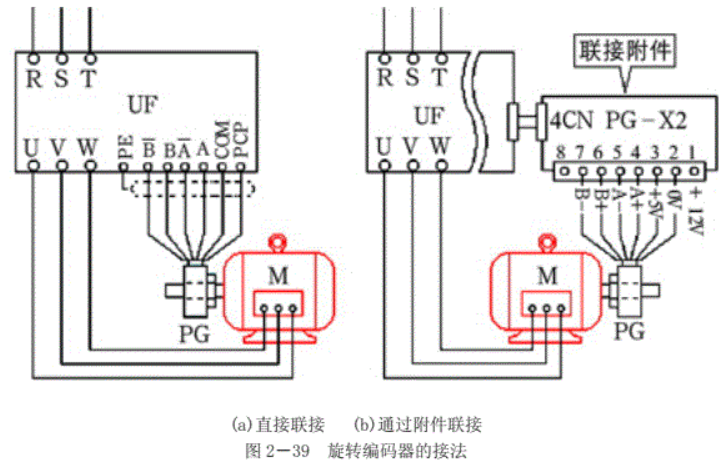
- 把编码器套在电机的转动轴上,有的变频器自带编码器接口,有的变频器不带,就用连接附件连接编码器。
- 只有变频电动机才可以直接连接编码器,普通电机需要一个连接套
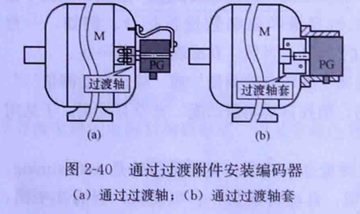
- 对于轴套型编码器,要在电动机输出轴的另一侧,把外罩孔扩大,在轴上附加一个过渡轴,再把编码器套在过渡轴上,编码器的不动部分固定在外罩上,如图(a)所示。但这种方法对过渡轴和电动机轴之间的同心度要求较高,在加工时难度较大。
- 实际工作中可采用轴型编码器,则需附加一个过渡轴套,如图(b)所示。只要过渡轴套和电动机轴之间的规格相吻合,就比较容易实现。
无矢量反馈控制和有矢量反馈控制
- 二者的区别在于有没有外部的速度反馈,但他们都需要速度反馈。
- 无矢量反馈控制是变频器通过电流和电压来计算得的速度反馈,反应速度慢。
- 有矢量反馈控制是通过外部编码器反馈的速度,速度很快而且精度更高。
附学习参考网址
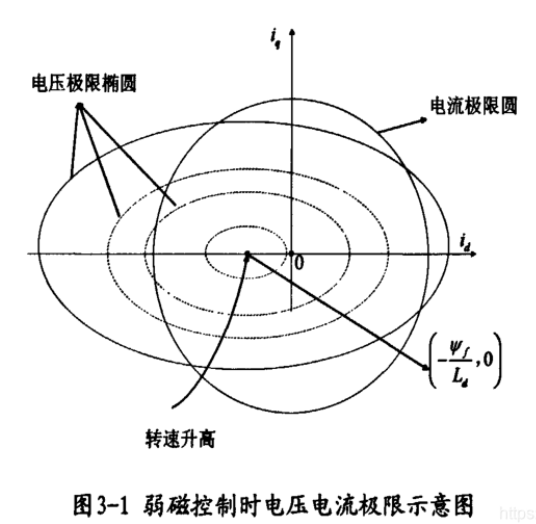
- 永磁同步电机的矢量控制策略(十一)一一一弱磁控制
欢迎大家有问题评论交流 (* ^ ω ^)
- 关于圆图的部分我不确定写的是否正确,有知道的大佬可以在评论区说一下