ros2--参数指令--rqt
参看参数指令
ros2 param --help
查看所有节点的所有参数
ros2 param list
某个参数的具体描述
ros2 param describe 节点名 参数
eg:
ros2 param describe /turtlesim background_b
查看该参数的具体值
ros2 param get 节点名 参数
eg:
ros2 param get /turtlesim background_b
修改参数的值
ros2 param get 节点名 参数 值
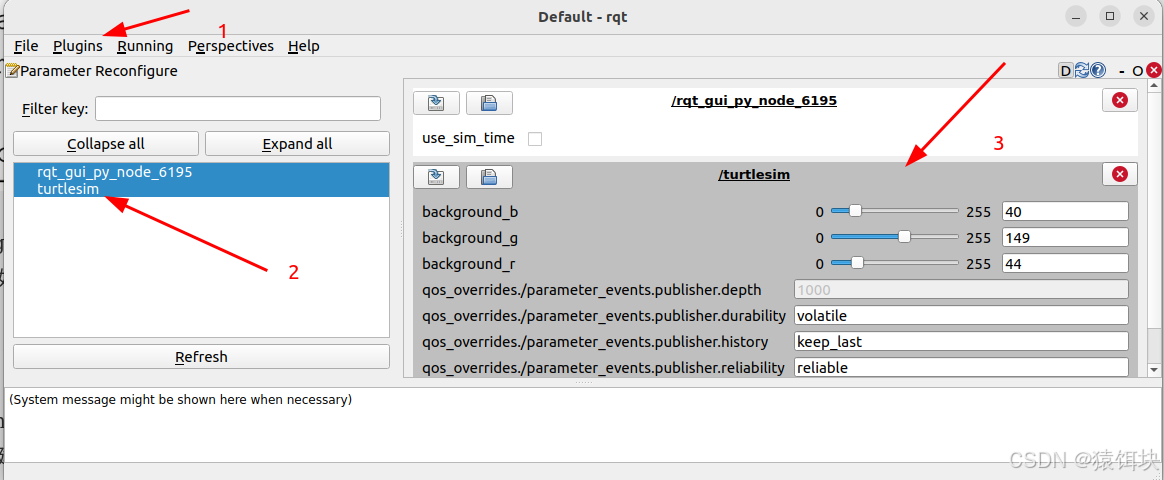
rqt设置参数
plugin--Configuration→DynamicReconfigure。
刚打开没有参数,需要点击节点名,才会现实出参数。