AutoSAR(MCAL) --- ADC
一、前置条件
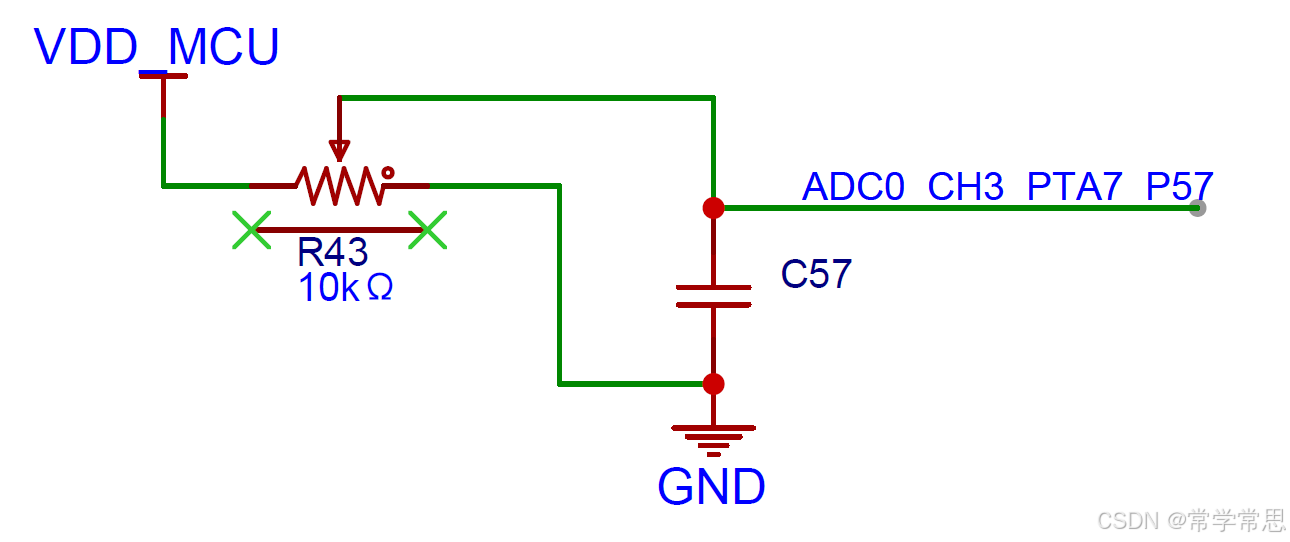
1.原理图
如图,要读取PTA7脚的ADC值
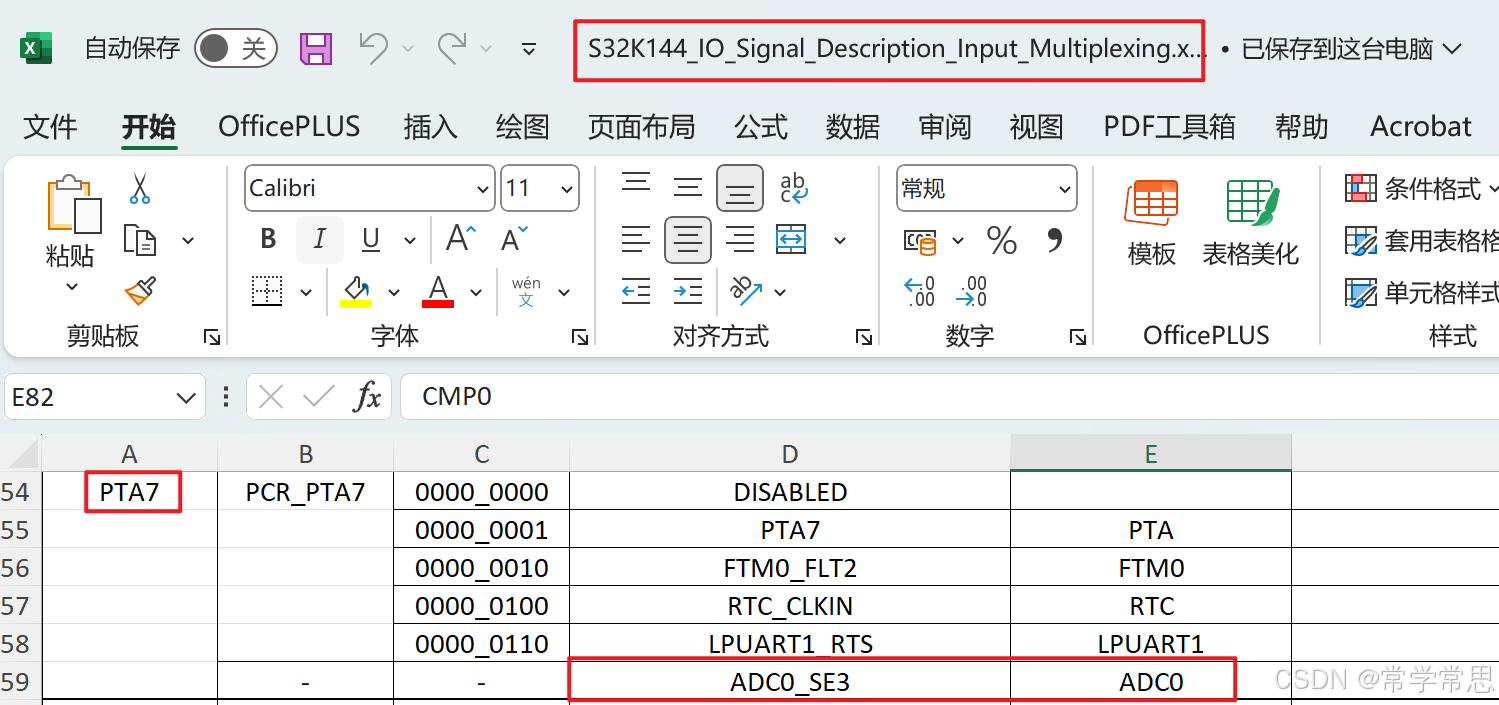
2.芯片
使用芯片为S32K144,由IO描述文件可知PTA7对应的为ADC0的CH3
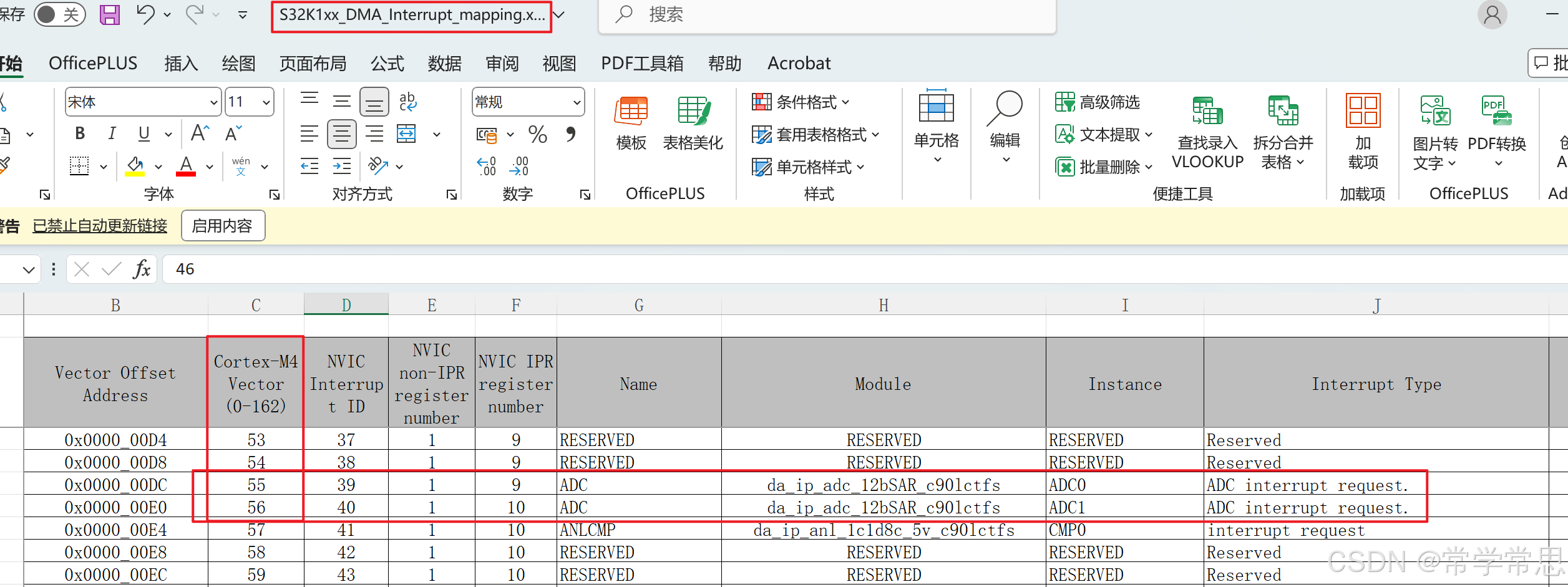
3.中断向量
S32K1xx_DMA_Interrupt_mapping.xlsx中:
可以看见,在Vector中:ADC0的中断向量地址为:55
4.ADC 参考电压
由原理图可见,VREFL = 0V, VREFH = VREFH电压
Vadc参考电压 = VREFH - VREFL(0V)
如图,要读取PTA7脚的ADC值
使用芯片为S32K144,由IO描述文件可知PTA7对应的为ADC0的CH3
S32K1xx_DMA_Interrupt_mapping.xlsx中:
可以看见,在Vector中:ADC0的中断向量地址为:55
由原理图可见,VREFL = 0V, VREFH = VREFH电压
Vadc参考电压 = VREFH - VREFL(0V)