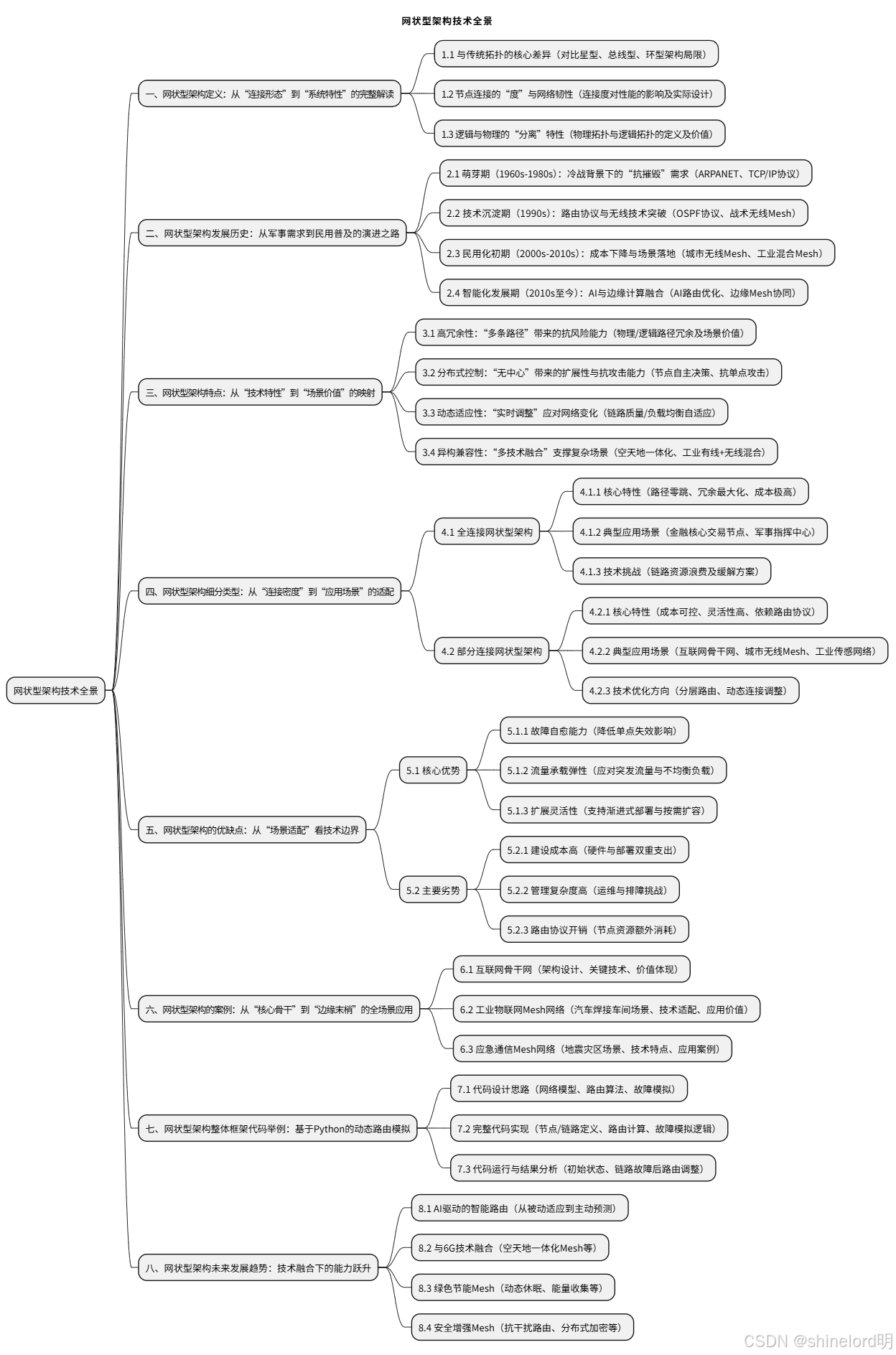
【计算机网络架构】网状型架构简介
在数字时代,网络架构是支撑信息流转的核心骨架。从早期的单机通信到如今的全球互联,人类对 “更可靠、更高效、更灵活” 的网络需求从未停止。网状型架构作为一种以 “多节点互联” 为核心的拓扑设计,凭借其天然的冗余能力和分布式特性,成为复杂网络场景的关键选择 —— 从横跨大洋的海底光缆骨干网,到城市楼宇间的无线 Mesh 覆盖,再到工业车间里的物联网传感网络,网状型架构始终在默默支撑着 “断网即瘫痪” 的现代社会。技术本质,系统拆解网状型架构的底层逻辑、发展脉络、应用边界与未来可能,为读者呈现这一拓扑结构的完整技术图景。
一、网状型架构定义:从 “连接形态” 到 “系统特性” 的完整解读
网状型架构(Mesh Architecture)是指网络中任意节点通过多条物理或逻辑链路与其他节点形成多对多连接的拓扑结构。在这一架构中,不存在 “中心节点” 或 “固定主干”,每个节点(如路由器、交换机、无线 AP、传感器等)既可以作为数据的发起 / 接收端,也能作为转发中继,通过协同计算完成数据的路径选择与传输。
1.1 与传统拓扑的核心差异
| 一级类别 | 二级子项 | 三级说明 |
| 网状型架构定义 | 核心定义 | 网络中任意节点通过多条物理或逻辑链路与其他节点形成多对多连接的拓扑结构;无中心节点或固定主干,每个节点可作为数据发起 / 接收端或转发中继,通过协同计算完成路径选择与传输(节点类型:路由器、交换机、无线 AP、传感器等) |
| 与传统拓扑的核心差异 | 传统拓扑局限 - 星型架构 | 所有节点依赖中心设备(如交换机)转发数据,中心故障则全网瘫痪 |
| 传统拓扑局限 - 总线型架构 | 所有节点共享一条传输介质(如同轴电缆),单节点故障可能引发全网冲突 | |
| 传统拓扑局限 - 环型架构 | 节点首尾相连形成闭合环路,单链路断裂会导致全网通信中断(双环设计可缓解但成本倍增) | |
| 网状型架构的优势 | 通过 “无中心 + 多路径” 设计解决传统拓扑 “单点依赖” 问题,具备 “自愈能力”(如链路中断时数据自动切换至其他路径) | |
| 节点连接的 “度” 与网络韧性 | 连接度对性能的影响 | 连接度越高:路径冗余越充足,但硬件成本(接口、线缆)和维护复杂度上升; |
| 连接度过低(如仅连 2 个节点):可能退化为 “类环型” 结构,失去冗余优势 | ||
| 实际应用中的连接度设计 | 核心骨干网(如国家一级光缆网):关键节点连接度 4-8 个,确保 “任断 2 条链路仍能通信”; | |
| 边缘接入网(如校园无线 Mesh):节点连接度 2-3 个,平衡成本与可靠性 | ||
| 逻辑与物理的 “分离” 特性 | 物理拓扑 | 节点间的实际硬件连接(如光缆、无线信号) |
| 逻辑拓扑 | 通过路由协议(如 OSPF、BGP)动态生成的 “虚拟路径”,可根据实时网络状态调整 | |
| 分离特性的价值 | 具备极强灵活性(如两节点无直接物理连接时,可通过中间节点 “多跳转发” 形成逻辑通信路径) |
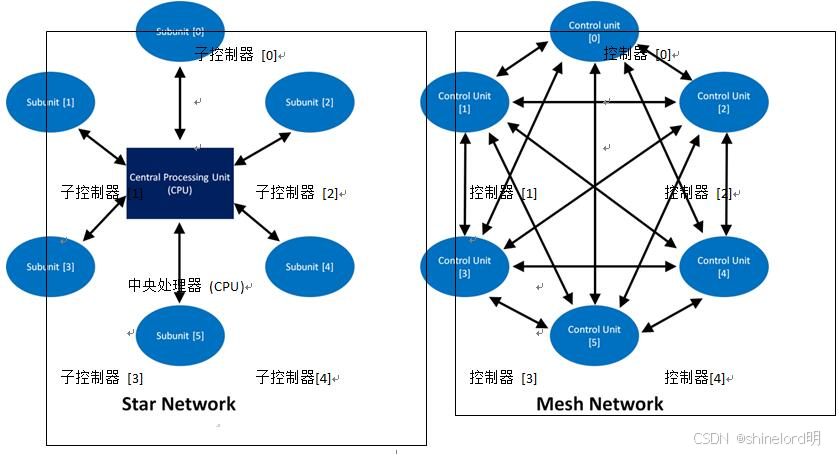
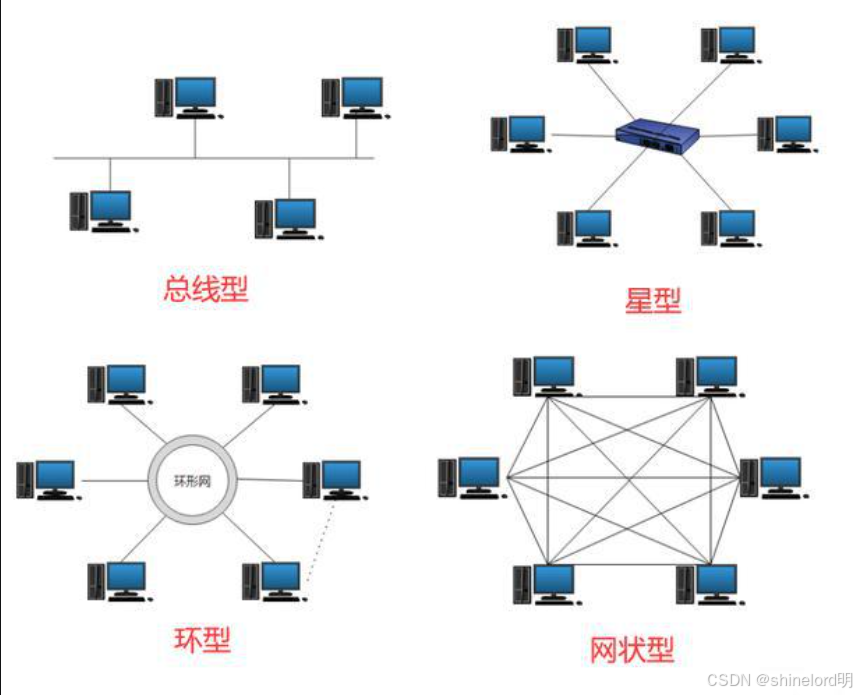
要理解网状型架构的本质,需先对比传统网络拓扑的局限:
- 星型架构:所有节点依赖中心设备(如交换机)转发数据,中心故障则全网瘫痪;
- 总线型架构:所有节点共享一条传输介质(如同轴电缆),单节点故障可能引发全网冲突;
- 环型架构:节点首尾相连形成闭合环路,单链路断裂会导致全网通信中断(双环设计可缓解但成本倍增)。
而网状型架构通过 “无中心 + 多路径” 的设计,从根本上解决了传统拓扑的 “单点依赖” 问题。例如,当某条链路因物理损坏(如光缆被船锚挂断)或干扰(如电磁屏蔽失效)中断时,数据可自动切换至其他可用路径 —— 这种 “自愈能力” 正是网状型架构的核心价值。
1.2 节点连接的 “度” 与网络韧性
在网状型架构中,节点的 “连接度”(与其他节点的直接连接数量)直接决定网络性能:
- 连接度越高,路径冗余越充足,但硬件成本(如接口、线缆)和维护复杂度也随之上升;
- 连接度过低(如仅与 2 个节点相连),则可能退化为 “类环型” 结构,失去冗余优势。
实际应用中,节点连接度通常根据场景需求设计:
- 核心骨干网(如国家一级光缆网):关键节点连接度普遍在 4-8 个,确保 “任断 2 条链路仍能通信”;
- 边缘接入网(如校园无线 Mesh):节点连接度多为 2-3 个,在成本与可靠性间平衡。
1.3 逻辑与物理的 “分离” 特性
现代网状型架构已实现 “物理拓扑” 与 “逻辑拓扑” 的分离:
- 物理拓扑:节点间的实际硬件连接(如光缆、无线信号);
- 逻辑拓扑:通过路由协议(如 OSPF、BGP)动态生成的 “虚拟路径”,可根据实时网络状态调整。
这种分离让网状型架构具备极强的灵活性 —— 例如,某两个节点的物理链路可能因距离过远未直接连接,但通过中间节点的 “多跳转发”,逻辑上仍可形成稳定通信路径。
二、网状型架构发展历史:从军事需求到民用普及的演进之路
网状型架构的发展并非偶然,而是 “可靠性需求” 与 “技术能力” 长期博弈的结果。其演进历程可分为四个关键阶段,每个阶段都对应着特定的技术突破与场景驱动。
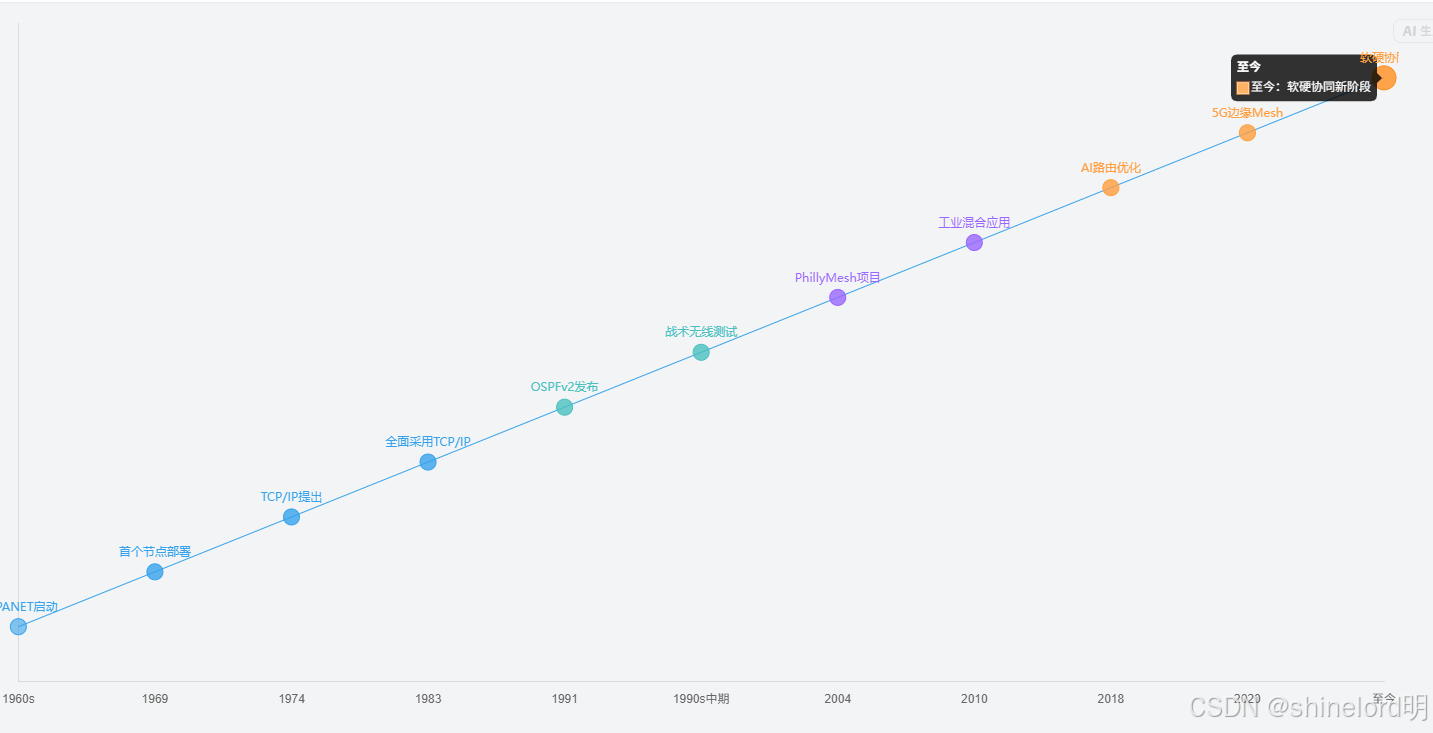
2.1 萌芽期(1960s-1980s):冷战背景下的 “抗摧毁” 需求
网状型架构的雏形源于军事通信对 “抗核打击” 的极端需求。20 世纪 60 年代,美国国防部高级研究计划局(DARPA)启动 ARPANET 项目时,明确要求 “即使部分节点被摧毁,剩余网络仍能通信”—— 这一需求直接催生了 “分布式分组交换” 与 “网状连接” 的设计思路。
1969 年,ARPANET 最初的 4 个节点(加州大学洛杉矶分校、斯坦福研究院等)通过点对点链路连接,虽未形成 “全连接”,但已具备 “多路径转发” 的核心特征:当某条链路中断时,数据可通过其他节点中继。这种设计突破了传统电路交换(如电话网)的 “独占链路” 模式,为网状型架构奠定了理论基础。
1974 年,TCP/IP 协议的提出进一步推动了网状逻辑 —— 通过 IP 地址标识节点、TCP 保证传输可靠性,不同类型的节点可无缝接入网状网络。到 1983 年 ARPANET 全面采用 TCP/IP 时,网状型架构的 “节点平等”“动态路由” 等核心特性已基本成型。
2.2 技术沉淀期(1990s):路由协议与无线技术的突破
进入 90 年代,互联网商业化推动网状型架构从 “军事需求” 转向 “民用可靠性”。这一阶段的两大技术突破尤为关键:
- 链路状态路由协议(OSPF)的成熟:1991 年 OSPFv2 协议发布,支持网状网络中节点动态交换链路状态信息(如带宽、延迟),并通过 Dijkstra 算法计算最短路径。这让大规模网状网络的 “智能选路” 成为可能 —— 例如,当某条链路负载超过 80% 时,协议可自动将流量引导至负载较低的路径。
- 无线 Mesh 的早期探索:90 年代中期,美军开始测试 “战术无线 Mesh 网络”(如 AN/PRC-158 电台),通过士兵背负的节点形成临时网状连接,解决战场移动场景下的通信问题。这类网络支持 “移动中自愈”:当士兵移动导致链路中断时,节点可在 50ms 内重新建立连接。
这一时期,网状型架构仍局限于专业领域(军事、科研),核心原因是硬件成本过高 —— 例如,支持多链路的路由器单价超过 10 万美元,普通企业难以承受。
2.3 民用化初期(2000s-2010s):成本下降与场景落地
2000 年后,半导体技术的进步(如 ASIC 芯片集成度提升)使网状设备成本大幅下降(路由器单价降至 1 万美元以内),推动网状型架构进入民用领域。这一阶段的标志性事件包括:
- 无线 Mesh 在城市覆盖中的应用:2004 年,美国费城启动 “PhillyMesh” 项目,部署 1500 个无线 Mesh 节点覆盖全城,为低收入群体提供免费网络。节点采用 “5.8GHz+2.4GHz” 双频段设计,5.8GHz 用于节点间回传(形成网状),2.4GHz 用于用户接入,单节点覆盖半径达 300 米,支持 1000 + 用户同时连接。
- 工业物联网的 “有线 + 无线” 混合网状:2010 年前后,制造业开始采用 “工业以太网 + 无线 Mesh” 混合架构 —— 车间内的 PLC(可编程逻辑控制器)通过有线网状连接确保实时控制(延迟 < 10ms),移动设备(如 AGV 机器人)通过无线 Mesh 接入,实现 “移动不中断” 的通信。
这一时期的技术痛点是 “路由收敛速度”—— 当网络拓扑变化(如节点离线)时,部分协议需要 1-2 秒才能完成路径重选,难以满足工业控制等低延迟场景需求。
2.4 智能化发展期(2010s 至今):AI 与边缘计算的融合
2015 年后,AI 技术与边缘计算的兴起为网状型架构注入新活力:
- AI 路由优化:2018 年,谷歌在其数据中心网状网络中引入强化学习算法,通过分析历史流量数据预测链路负载,提前调整路由策略,使网络拥塞概率降低 40%。
- 边缘 Mesh 协同:2020 年,5G 基站开始采用 “边缘 Mesh” 设计 —— 相邻基站通过毫米波链路形成网状连接,当核心网故障时,基站可自主组成 “本地 Mesh”,维持基本通信(如应急通话、定位)。
目前,网状型架构已进入 “软硬协同” 的新阶段:硬件上,光子芯片(如硅光模块)提升链路带宽至 400Gbps;软件上,SDN(软件定义网络)实现网状拓扑的集中化配置与动态调整。
三、网状型架构特点:从 “技术特性” 到 “场景价值” 的映射
网状型架构的核心优势并非孤立存在,而是通过 “多节点协同” 形成的系统性能力。这些特点相互作用,共同支撑起其在复杂场景中的应用价值。

3.1 高冗余性:“多条路径” 带来的抗风险能力
冗余性是网状型架构最核心的特点,体现在 “物理链路冗余” 与 “逻辑路径冗余” 两个层面:
- 物理链路冗余:关键节点间通常部署 2-4 条独立链路(如不同路由的光缆、不同频段的无线链路)。例如,中国电信的骨干网中,北京至上海的核心路由同时部署了 “陆缆 + 海底光缆” 两条物理链路,陆缆途经华北平原,海缆沿黄海海岸铺设,两者在地理上完全隔离,可避免自然灾害(如地震、洪水)导致的同时中断。
- 逻辑路径冗余:即使物理链路固定,网状结构仍能通过多跳转发生成数十条逻辑路径。例如,一个由 10 个节点组成的部分网状网络,任意两点间的逻辑路径可达 5-8 条,通过路由协议选择最优路径(如最低延迟、最低丢包率)。
这种冗余性直接转化为 “业务连续性”—— 在金融交易场景中,银行核心系统的网状网络可确保 “任断一条链路,交易不中断”;在医疗场景中,手术室的无线 Mesh 网络可保障手术机器人与控制台的实时通信(丢包率 < 0.01%)。
3.2 分布式控制:“无中心” 带来的扩展性与抗攻击能力
网状型架构的 “无中心” 设计,本质是将控制逻辑分散到每个节点,而非依赖单一设备:
- 节点自主决策:每个节点通过路由协议(如 BGP、RIP)与邻居交换网络状态信息(如链路可用带宽、延迟),独立计算转发路径。例如,当某节点检测到自身负载过高(CPU 使用率 > 80%),可主动向邻居发送 “负载告警”,邻居节点会自动减少向其转发的数据量。
- 抗单点攻击能力:由于没有 “核心节点”,攻击者无法通过摧毁单一目标瘫痪全网。例如,在军事 Mesh 网络中,即使 30% 的节点被摧毁,剩余节点仍能重组网络(通过调整发射功率扩大覆盖),维持基本通信。
分布式控制也带来了极强的扩展性 —— 新增节点只需与 2-3 个现有节点建立连接,即可融入网络,无需修改全局配置。这与星型架构形成鲜明对比:星型网络的中心设备端口数量固定,新增节点可能需要更换中心设备(如从 24 口交换机升级到 48 口)。
3.3 动态适应性:“实时调整” 应对网络变化
网状型架构能实时感知网络状态变化(如链路质量下降、节点移动),并自动调整策略:
- 链路质量自适应:在无线 Mesh 网络中,节点通过 “信号强度检测”(如 RSSI 值)实时评估链路质量。当某条链路的信号强度从 - 60dBm 降至 - 85dBm(信号变弱),节点会主动将数据切换至信号更强的链路(如从 2.4GHz 频段切换至 5GHz),避免丢包率上升。
- 负载均衡自适应:当某条链路负载超过阈值(如带宽使用率 > 70%),节点会通过 “流量分流” 将部分数据引导至其他链路。例如,视频监控的网状网络中,当某条链路因 4K 视频流拥塞时,节点可将部分摄像头的流量切换至其他路径,确保所有视频的帧率稳定(25 帧 / 秒)。
这种动态适应性在移动场景中尤为重要 —— 在自动驾驶车队中,车辆间的无线 Mesh 网络可随车辆行驶(速度 < 60km/h)实时调整连接关系,确保车车通信延迟 < 50ms(满足碰撞预警需求)。
3.4 异构兼容性:“多技术融合” 支撑复杂场景
网状型架构不依赖单一传输技术,可融合有线(光缆、双绞线)、无线(WiFi、5G、LoRa)、卫星等多种连接方式,形成 “混合 Mesh”:
- 空天地一体化 Mesh:在偏远地区通信中,地面基站、高空无人机、低轨卫星组成混合网状网络 —— 基站覆盖村庄,无人机覆盖山区(飞行高度 500 米,覆盖半径 10 公里),卫星覆盖无地面设施区域,三者通过 Mesh 协议协同,实现全域通信覆盖。
- 工业 “有线 + 无线”Mesh:在汽车工厂,焊接机器人通过有线 Mesh(工业以太网)连接控制中心(确保实时性),物流 AGV 通过无线 Mesh(WiFi 6)接入(支持移动性),两类网络通过网关融合,形成 “控制 - 物流” 协同的闭环。
这种兼容性让网状型架构能适应 “技术迭代”—— 当 5G 替代 4G、光纤替代铜缆时,无需重构网络拓扑,只需替换节点的接入模块,降低升级成本。
四、网状型架构细分类型:从 “连接密度” 到 “应用场景” 的适配
根据节点连接的 “密集程度”,网状型架构可分为 “全连接网状” 与 “部分连接网状” 两大类型。两者并非 “优劣关系”,而是针对不同场景的 “成本 - 性能” 平衡选择。
4.1 全连接网状型架构:“极致冗余” 适配高安全需求场景
全连接网状型架构的定义是:网络中任意两个节点均通过直接链路连接(即每个节点与其他所有节点存在物理连接)。例如,一个由 n 个节点组成的全连接网络,链路总数为 n×(n-1)/2—— 当 n=5 时,链路数为 10 条;n=10 时,链路数为 45 条。
4.1.1 核心特性
- 路径零跳:任意两点间均有直接链路,无需多跳转发,数据传输延迟极低(仅受物理链路延迟影响);
- 冗余最大化:单节点故障仅影响与其相关的链路,其他节点间通信不受影响;
- 成本极高:链路数量随节点数呈平方增长,硬件(线缆、接口)与运维成本陡峭上升。
4.1.2 典型应用场景
全连接网状架构仅适用于 “节点数量少 + 可靠性要求极致” 的场景:
- 金融核心交易节点:银行总行与几个核心分行(如北京、上海、深圳分行)的服务器集群通常采用全连接网状 —— 每个分行与总行、分行之间均部署直连光缆(双路由),确保跨境交易(如外汇结算)的低延迟(<50ms)与零中断。
- 军事指挥中心:战区指挥中心、雷达站、导弹发射车组成的小型网络(节点数 <10)采用全连接设计,链路使用抗干扰无线电台(跳频技术,抗截获能力强),确保指挥指令 “秒级送达” 且不依赖中间节点。
4.1.3 技术挑战
全连接网状的核心挑战是 “链路资源浪费”—— 多数链路在正常情况下处于 “备用” 状态(使用率 < 20%)。为缓解这一问题,现代全连接网络通常采用 “链路聚合” 技术:将多条物理链路绑定为一条逻辑链路(如 IEEE 802.3ad 协议),正常时共同承载流量,故障时自动切换,提升资源利用率。
4.2 部分连接网状型架构:“平衡冗余与成本” 适配大规模场景
部分连接网状型架构的定义是:节点仅与 “关键需求” 的节点建立直接连接,其他节点通过多跳转发通信。例如,一个由 20 个节点组成的部分网状网络,链路数通常为 30-40 条(远低于全连接的 190 条),节点平均连接度为 3-4 个。
4.2.1 核心特性
- 成本可控:链路数量随节点数线性增长(而非平方),适合大规模部署;
- 灵活性高:可根据业务优先级调整连接关系(如核心节点连接度高,边缘节点连接度低);
- 依赖路由协议:多跳转发需路由协议实时优化路径,对协议性能要求较高。
4.2.2 典型应用场景
部分连接网状是目前最主流的形态,覆盖从骨干网到边缘接入的全场景:
- 互联网骨干网:全球互联网由数万个 AS(自治系统)组成部分网状 —— 大型运营商(如中国电信、AT&T)的 AS 节点与其他 10-20 个核心 AS 直连,小型 AS 仅与 2-3 个大型 AS 连接,通过 BGP 协议实现跨 AS 通信。
- 城市无线 Mesh 覆盖:智慧城市的路灯、摄像头组成部分网状网络 —— 每个路灯节点与相邻 2-3 个路灯节点无线连接(5.8GHz 频段),摄像头数据通过多跳转发至最近的汇聚点(如基站),单平方公里可部署 50-100 个节点,实现全区域无死角覆盖。
- 工业物联网传感网络:化工厂的传感器(温度、压力、气体检测)组成部分网状 —— 关键区域传感器(如反应釜附近)与 4 个邻居连接,普通区域传感器与 2 个邻居连接,数据通过 Mesh 路由汇聚至控制中心,确保泄漏检测等告警信息 “10 秒内送达”。
4.2.3 技术优化方向
部分连接网状的核心优化方向是 “路由效率”:
- 分层路由:将网络分为核心层(高连接度节点)与边缘层(低连接度节点),边缘节点仅与核心节点通信,减少路由信息交换量;
- 动态连接调整:通过 AI 算法分析节点通信频率,自动为 “高频通信节点” 增加连接(如临时激活备用链路),降低延迟。
五、网状型架构的优缺点:从 “场景适配” 看技术边界
网状型架构的优势与劣势并非绝对,而是与应用场景的 “需求权重” 深度绑定。理解其优缺点的 “边界条件”,才能避免 “为技术而技术” 的盲目选择。
5.1 核心优势:在 “可靠性优先” 场景中的不可替代性
5.1.1 故障自愈能力:降低 “单点失效” 的业务影响
在传统拓扑中,中心节点或主干链路故障可能导致 “片区瘫痪”—— 例如,星型网络的中心交换机故障会导致所有接入节点断网。而网状型架构通过多路径设计,可将故障影响范围限制在 “局部”:
- 链路故障影响:单条链路中断仅影响直接连接的两个节点,其他节点可通过其他路径通信;
- 节点故障影响:单节点离线仅影响以其为中继的路径,路由协议会在 100ms-1s 内重新计算路径。
在电力调度通信中,这种能力尤为关键 —— 变电站、调度中心通过网状网络连接,即使某变电站因雷击离线,调度指令仍能通过其他变电站中继,确保电网稳定运行。
5.1.2 流量承载弹性:应对 “突发流量” 与 “不均衡负载”
网状型架构的多路径特性,使其能通过 “负载均衡” 提升整体流量承载能力:
- 静态负载均衡:通过路由协议将不同类型的流量分配至不同路径(如视频流走高带宽链路,控制流走低延迟链路);
- 动态负载均衡:实时监测链路利用率,当某条链路负载超过阈值(如 70%),自动将部分流量切换至低负载链路。
在直播带货场景中,直播间服务器与 CDN 节点的网状连接可应对 “瞬时流量峰值”—— 当某条链路因观众突然涌入(并发量从 10 万增至 100 万)拥塞时,流量会自动分流至其他链路,避免画面卡顿。
5.1.3 扩展灵活性:支持 “渐进式部署” 与 “按需扩容”
传统拓扑的扩展往往受限于 “中心节点容量”—— 例如,总线型网络的传输介质带宽固定,新增节点会导致带宽分摊,性能下降。而网状型架构的扩展更 “灵活”:
- 无容量瓶颈:新增节点只需与现有 1-2 个节点连接,不会占用其他节点的资源;
- 成本渐进:可根据用户增长逐步增加节点(如从 10 个增至 20 个),无需一次性投入大规模基础设施。
在农村通信建设中,这种特性尤为重要 —— 先部署核心节点覆盖乡镇,再逐步增加边缘节点覆盖村庄,避免 “超前建设” 的资源浪费。
5.2 主要劣势:在 “成本敏感” 或 “简单场景” 中的局限性
5.2.1 建设成本高:硬件与部署的双重支出
网状型架构的 “多连接” 特性直接推高建设成本:
- 硬件成本:节点需配备更多接口(如路由器需 4-8 个光口,而非 2-4 个),链路数量增加导致线缆(如光缆、光纤收发器)成本上升;
- 部署成本:在复杂环境(如城市楼宇、山区)中,多链路部署需更多施工(如穿墙打孔、立杆架线),人工成本增加。
以一个覆盖 10 平方公里的无线 Mesh 网络为例:全连接架构需部署 50 个节点、1225 条链路(理论值),硬件成本约 200 万元;部分连接架构需 50 个节点、100 条链路,成本约 80 万元;而星型架构(1 个中心节点 + 49 个边缘节点)仅需 49 条链路,成本约 30 万元。显然,在 “仅需基本覆盖,对可靠性要求不高” 的场景(如偏远村庄临时通信),网状架构的成本优势不明显。
5.2.2 管理复杂度高:运维与排障的挑战
网状型架构的 “分布式” 特性,使管理难度远超传统拓扑:
- 配置一致性:每个节点需独立配置路由协议参数(如 OSPF 区域、BGP 邻居),若参数不一致(如路由优先级冲突),可能导致路由环路(数据在节点间无限转发);
- 故障定位:当某条链路丢包率上升时,需排查所有相关节点(源节点、中继节点、目标节点)的接口状态、协议状态,定位时间是星型架构的 3-5 倍;
- 性能优化:需平衡 “路径最短” 与 “负载均衡”,过度追求最短路径可能导致部分链路拥塞,过度均衡可能增加延迟。
在中小型企业场景中,这一劣势尤为突出 —— 企业 IT 团队通常仅有 1-2 名网络管理员,难以应对网状架构的复杂运维,更倾向选择 “即插即用” 的星型架构。
5.2.3 路由协议开销:节点资源的额外消耗
路由协议的 “信息交换” 会占用节点的 CPU、内存与带宽资源:
- CPU / 内存:节点需存储全网拓扑信息(如路由表),并通过算法计算最优路径 —— 在 100 个节点的网络中,路由表条目可达数千条,占用大量内存;
- 带宽:节点定期向邻居发送路由更新报文(如 OSPF 的 Hello 报文、LSA 更新),在带宽有限的场景(如 LoRa 物联网)中,可能挤占业务数据的传输资源。
在低功耗场景(如电池供电的传感器网络)中,这一问题更明显 —— 传感器节点的电池容量有限,路由协议的额外功耗会缩短续航时间(从 1 年降至 6 个月),增加更换电池的成本。
六、网状型架构的案例:从 “核心骨干” 到 “边缘末梢” 的全场景应用
网状型架构的应用已渗透到从 “全球通信” 到 “车间传感” 的全场景,不同场景对其特性的利用各有侧重 —— 有的聚焦冗余性,有的侧重扩展性,有的依赖动态适应性。
6.1 互联网骨干网:全球数据流转的 “高速公路网”
互联网骨干网是网状型架构最典型的应用 —— 由全球数万个核心路由器通过光缆连接,形成 “洲际 - 国家 - 区域” 三级网状结构。
6.1.1 架构设计
- 洲际骨干:跨洋海底光缆(如中美海底光缆、亚欧海底光缆)连接各大洲的核心节点(如美国纽约、中国上海、英国伦敦),每个核心节点与 3-5 个其他洲际节点直连(部分连接网状);
- 国家骨干:国内核心城市(如北上广深)的路由器组成网状,每个城市节点与 2-4 个其他城市节点直连,确保区域内数据高效流转;
- 区域骨干:省 / 市范围内的节点连接,边缘城市通过 1-2 个核心城市接入国家骨干。
6.1.2 关键技术
- BGP 协议:用于不同自治系统(AS)间的路由选择,通过 “路径属性”(如 AS 路径长度、本地优先级)选择最优路径;
- 光传输网(OTN):为骨干链路提供大容量传输(单波 100Gbps,一纤 80 波),支持链路冗余保护(如 1+1 路径保护)。
6.1.3 价值体现
- 抗毁性:2021 年,某跨太平洋海底光缆被渔船锚链挂断,流量在 15 分钟内自动切换至其他光缆,未对用户造成明显影响;
- 负载均衡:通过 BGP 路由调整,将中国至北美东海岸的流量分配至 “中美光缆” 与 “亚欧 + 跨大西洋光缆” 两条路径,避免单条光缆拥塞。
6.2 工业物联网 Mesh 网络:制造业的 “神经感知系统”
在工业场景中,网状型架构是连接 “设备 - 传感器 - 控制中心” 的核心选择,尤其适合高干扰、移动性强的环境。
6.2.1 典型场景:汽车焊接车间
- 设备构成:50 个焊接机器人、20 个 AGV(自动导引车)、100 个温度 / 烟雾传感器,通过工业无线 Mesh(基于 IEEE 802.11s 协议)连接;
- 架构设计:机器人与 AGV 作为 “移动节点”,传感器作为 “固定节点”,两者形成部分连接网状 —— 机器人与附近 2 个传感器、1 个 AGV 连接,确保移动时不中断;
- 关键需求:低延迟(控制指令 < 50ms)、高可靠(丢包率 < 0.1%)、抗干扰(焊接电火花产生强电磁干扰)。
6.2.2 技术适配
- 抗干扰设计:采用 “跳频技术”(每秒切换 50 次频率)避开干扰频段,节点支持 “多天线 MIMO”(4×4 天线),通过空间分集提升信号稳定性;
- 优先级调度:焊接机器人的控制指令标记为 “最高优先级”,优先占用链路,确保实时性。
6.2.3 应用价值
- 减少布线:车间无需铺设大量电缆(传统工业以太网需每台设备布线),降低改造成本(单车间节省 50 万元);
- 灵活调整:当生产线调整(如增加机器人),只需新增节点与现有节点连接,无需重构网络。
6.3 应急通信 Mesh 网络:灾害中的 “生命通信线”
在地震、洪水等灾害中,传统通信基础设施(基站、光缆)易被损毁,网状型架构成为应急通信的核心支撑。
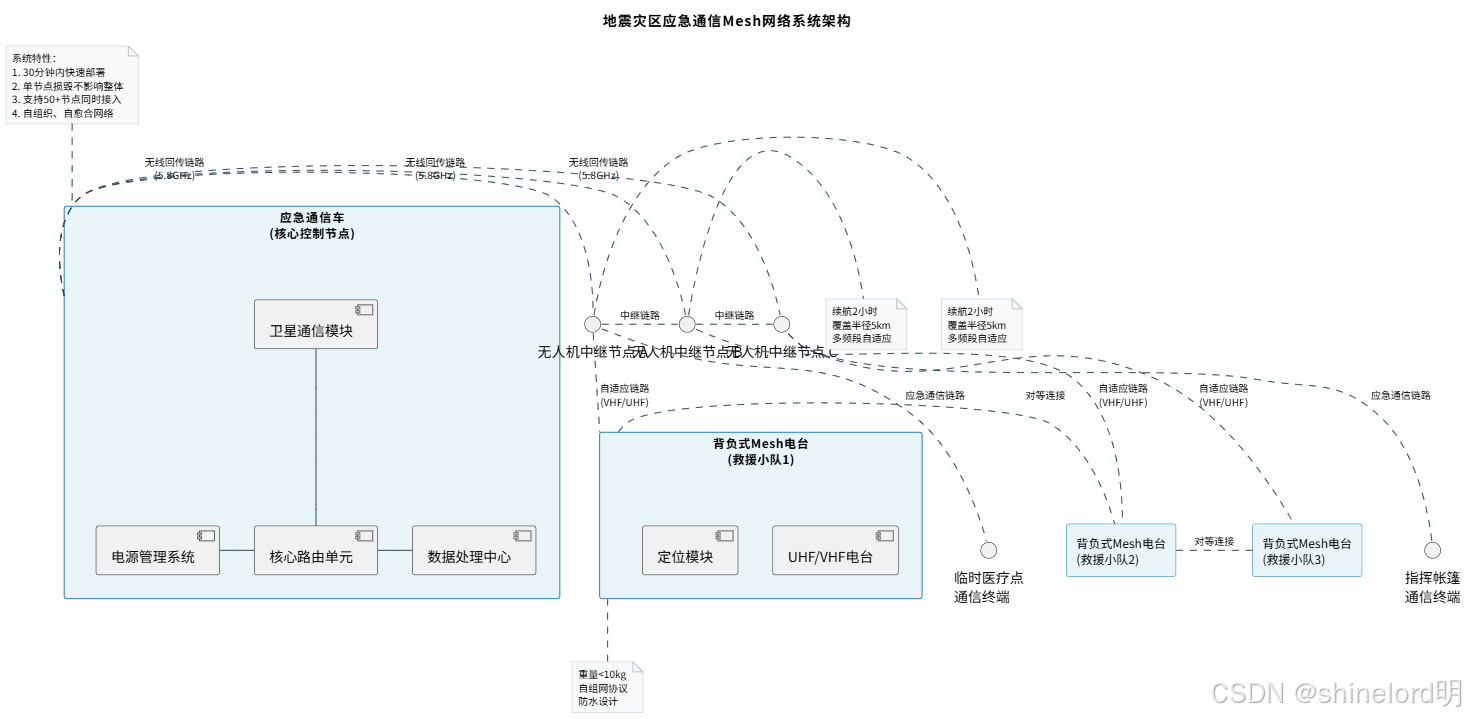
6.3.1 典型场景:地震灾区通信
- 设备构成:应急通信车(核心节点)、背负式 Mesh 电台(救援人员携带)、无人机中继节点(续航 2 小时,覆盖半径 5 公里);
- 架构设计:通信车与 3-5 个无人机节点连接,无人机与背负式电台连接(部分连接网状),形成 “地面 - 空中” 立体覆盖;
- 关键需求:快速部署(30 分钟内组网)、抗毁(单个节点损毁不影响整体)、便携(设备重量 < 10kg)。
6.3.2 技术特点
- 自组网协议:采用 Ad Hoc 协议,节点开机后自动发现邻居并建立连接,无需人工配置;
- 多频段自适应:支持 VHF(超短波,绕射能力强)与 UHF(特高频,带宽大),根据距离自动切换(近距用 UHF,远距用 VHF)。
6.3.3 应用案例
2023 年甘肃地震中,应急团队部署 10 个 Mesh 节点,覆盖 5 平方公里灾区,实现救援人员间语音通信(延迟 < 300ms)、定位信息传输,为搜救工作提供关键通信支持。
七、网状型架构整体框架代码举例:基于 Python 的动态路由模拟
为直观理解网状型架构的 “动态路由” 机制,以下通过 Python 代码模拟一个包含 5 个节点的部分连接网状网络,实现 “链路故障时自动切换路径” 的核心功能。

7.1 代码设计思路
- 网络模型:5 个节点(A、B、C、D、E)组成部分连接网状,链路包含带宽、延迟属性;
- 路由算法:采用改进的 Dijkstra 算法,根据 “延迟最低” 选择路径;
- 故障模拟:随机断开一条链路,观察路由表是否自动更新。
7.2 完整代码实现
import heapqclass MeshNetwork:def __init__(self):# 初始化节点与链路(键:(节点1,节点2),值:(延迟ms, 带宽Mbps, 是否可用))self.links = {('A', 'B'): (10, 100, True),('A', 'C'): (20, 100, True),('B', 'C'): (15, 100, True),('B', 'D'): (25, 100, True),('C', 'D'): (30, 100, True),('C', 'E'): (20, 100, True),('D', 'E'): (15, 100, True)}# 所有节点列表self.nodes = ['A', 'B', 'C', 'D', 'E']# 路由表(键:(源节点, 目标节点),值:(路径列表, 总延迟))self.routing_table = {}# 初始化路由表self.update_routing_table()def get_neighbors(self, node):"""获取节点的邻居(直接连接且可用的节点)"""neighbors = []for (n1, n2), (delay, bandwidth, available) in self.links.items():if available:if n1 == node:neighbors.append((n2, delay))elif n2 == node:neighbors.append((n1, delay))return neighborsdef dijkstra(self, start, end):"""Dijkstra算法计算最短延迟路径"""# 距离字典(节点:(总延迟, 前序节点))distances = {node: (float('inf'), None) for node in self.nodes}distances[start] = (0, None)# 优先队列(延迟, 当前节点)priority_queue = [(0, start)]visited = set()while priority_queue:current_delay, current_node = heapq.heappop(priority_queue)if current_node in visited:continueif current_node == end:breakvisited.add(current_node)# 遍历邻居for neighbor, delay in self.get_neighbors(current_node):new_delay = current_delay + delayif new_delay < distances[neighbor][0]:distances[neighbor] = (new_delay, current_node)heapq.heappush(priority_queue, (new_delay, neighbor))# 回溯路径path = []current = endwhile current is not None:path.append(current)current = distances[current][1]path.reverse()if len(path) == 1 and path[0] != start: # 无路径return None, float('inf')return path, distances[end][0]def update_routing_table(self):"""更新全网络路由表"""for start in self.nodes:for end in self.nodes:if start != end:path, delay = self.dijkstra(start, end)self.routing_table[(start, end)] = (path, delay)def simulate_link_failure(self, node1, node2):"""模拟链路故障(标记为不可用)"""if (node1, node2) in self.links:self.links[(node1, node2)] = (self.links[(node1, node2)][0], self.links[(node1, node2)][1], False)elif (node2, node1) in self.links:self.links[(node2, node1)] = (self.links[(node2, node1)][0], self.links[(node2, node1)][1], False)else:print(f"链路({node1}, {node2})不存在")return# 故障后更新路由表self.update_routing_table()print(f"\n模拟链路({node1}, {node2})故障后,路由表已更新")def print_routing_table(self, start_node=None):"""打印路由表(可指定源节点)"""print("\n===== 路由表示 =====")for (start, end), (path, delay) in self.routing_table.items():if start_node is None or start == start_node:if path:print(f"从{start}到{end}:路径{path},总延迟{delay}ms")else:print(f"从{start}到{end}:无可用路径")# 运行示例if __name__ == "__main__":# 创建网状网络mesh = MeshNetwork()# 打印初始路由表(A到所有节点)print("=== 初始状态 ===")mesh.print_routing_table(start_node='A')# 模拟链路B-C故障mesh.simulate_link_failure('B', 'C')# 打印故障后A到所有节点的路由表mesh.print_routing_table(start_node='A')# 模拟链路A-C故障(增加故障复杂度)mesh.simulate_link_failure('A', 'C')mesh.print_routing_table(start_node='A')7.3 代码运行与结果分析
7.3.1 初始状态(无故障)
从节点 A 到其他节点的路由路径如下:
- A→B:直接连接(延迟 10ms)
- A→C:直接连接(延迟 20ms)
- A→D:A→B→D(10+25=35ms,比 A→C→D 的 20+30=50ms 更优)
- A→E:A→C→E(20+20=40ms)
7.3.2 链路 B-C 故障后
链路 B-C 不可用,但路由表自动调整:
- A→D 仍为 A→B→D(无影响)
- 其他路径不变(因未依赖 B-C 链路)
7.3.3 链路 A-C 故障后
链路 A-C 不可用,路由表再次调整:
- A→C:需通过 A→B→D→C(10+25+30=65ms)
- A→E:需通过 A→B→D→C→E(10+25+30+20=85ms)
7.3.4 核心逻辑说明
代码通过 Dijkstra 算法模拟路由协议的 “路径计算” 过程,通过 “链路故障标记 + 路由表更新” 模拟网状网络的 “自愈能力”。实际网络中,路由协议(如 OSPF)会定期发送 “链路状态更新”,节点收到后重新计算路径,与代码逻辑一致。
八、网状型架构未来发展趋势:技术融合下的能力跃升
随着 AI、6G、光子技术的发展,网状型架构正从 “静态拓扑” 向 “智能、动态、超高性能” 演进,其应用边界将进一步扩展。
8.1 AI 驱动的智能路由:从 “被动适应” 到 “主动预测”
当前路由协议(如 OSPF、BGP)主要基于 “实时状态” 调整路径(被动适应),而 AI 技术将实现 “基于预测的主动优化”:
- 流量预测路由:通过 LSTM 神经网络分析历史流量数据(如工作日 9 点为高峰),提前 10-30 分钟将流量引导至备用链路,避免拥塞;
- 故障预测路由:通过分析链路的 “误码率变化趋势”,预测可能发生的故障(如光缆老化导致误码率上升),提前将流量切换至其他链路,实现 “故障未发生,路径已切换”。
谷歌在其数据中心网络中已测试相关技术 —— 通过 AI 预测链路负载,网络吞吐量提升 15%,拥塞时间减少 30%。未来 3-5 年,AI 路由将逐步普及至骨干网、工业 Mesh 等场景。
8.2 与 6G 技术融合:空天地一体化 Mesh 的实现
6G 的 “全域覆盖” 目标(陆地、海洋、空中、太空)将推动网状型架构向 “空天地一体化” 发展:
- 卫星 Mesh 网络:低轨卫星(如 Starlink)通过星际链路形成网状,卫星间直接通信(无需地面中继),实现全球无缝覆盖;
- 智能反射面 Mesh:在城市峡谷(高楼间)部署智能反射面(可调整信号反射方向),与基站形成网状,解决 6G 毫米波(绕射能力弱)的覆盖问题;
- 通感一体 Mesh:基站同时具备通信与感知能力(如通过雷达探测周边环境),根据车辆、行人位置动态调整 Mesh 链路(如避开障碍物)。
预计到 2030 年,6G Mesh 网络将实现 “在任意地点(包括沙漠、海洋)的 10Gbps 下载速率”,支持自动驾驶、全息通信等新场景。
8.3 绿色节能 Mesh:低功耗与高性能的平衡
随着 “双碳” 目标推进,网状型架构将向 “节能化” 演进:
- 动态休眠机制:非核心链路在流量低谷时自动休眠(如夜间关闭部分无线 Mesh 节点的回传链路),能耗降低 30%;
- 能量收集节点:边缘 Mesh 节点(如路灯传感器)通过太阳能、风能供电,配合低功耗芯片(如 ARM Cortex-M0),实现 “零电网依赖”;
- 绿色路由协议:路由选择时优先使用 “低能耗链路”(如光纤链路能耗低于无线链路),在延迟允许的情况下降低整体能耗。
在智慧农业场景中,太阳能 Mesh 传感器网络已实现 “部署后无需维护”(续航 5 年以上),大幅降低运营成本。
8.4 安全增强 Mesh:对抗 “定向攻击” 的韧性
随着网络攻击技术升级(如针对性干扰、节点入侵),网状型架构的安全能力将强化:
- 抗干扰路由:通过机器学习识别 “恶意干扰信号”(如特定频段的持续干扰),自动将链路切换至抗干扰频段(如跳频、扩频);
- 分布式加密:节点间通信采用 “端到端加密 + 分布式密钥管理”,单个节点被入侵不会导致全网密钥泄露;
- 虚假路由检测:通过区块链技术记录节点的路由行为(不可篡改),识别 “虚假路由信息攻击”(如恶意节点伪造路径)。
在军事通信中,这类技术已开始应用 —— 美军的 “战术 Mesh 网络” 可在遭受电子干扰时,1 秒内切换至抗干扰模式,通信可用性保持 99.9%。
网状型架构的价值,从来不是 “替代” 传统拓扑,而是在 “可靠性、灵活性、扩展性” 成为核心需求的场景中,提供不可替代的技术支撑。从互联网骨干网的 “全球互联” 到应急通信的 “生命保障”,从工业物联网的 “柔性生产” 到 6G 的 “全域覆盖”,网状型架构始终在通过 “多节点协同” 破解 “复杂场景下的通信难题”。未来,随着技术融合的深入,其将以更智能、更绿色、更安全的形态,支撑起更丰富的数字应用场景。