分类预测 | MATLAB基于四种先进的优化策略改进蜣螂优化算法(IDBO)的SVM多分类预测
分类预测 | MATLAB基于四种先进的优化策略改进蜣螂优化算法(IDBO)的SVM多分类预测
目录
- 分类预测 | MATLAB基于四种先进的优化策略改进蜣螂优化算法(IDBO)的SVM多分类预测
- 分类效果
- 基本介绍
- 多策略量子自适应螺旋搜索算法研究
- 摘要
- 1. 引言
- 1.1 研究背景
- 1.2 研究意义
- 1.3 研究目标
- 2. 文献综述
- 2.1 智能搜索算法理论基础
- 2.2 相关算法研究进展
- 2.3 研究空白与创新点
- 3. 自适应螺旋搜索机制
- 3.1 螺旋星系运动模拟
- 3.2 自适应调整策略
- 3.3 机制优势分析
- 4. 量子行为启发的位置更新
- 4.1 量子力学不确定性原理
- 4.2 位置更新策略实现
- 4.3 策略优势探讨
- 5. 多策略协同进化
- 5.1 各策略特点分析
- 5.2 策略融合方式
- 5.3 动态权重调整
- 6. 动态邻域拓扑结构
- 6.1 个体间相似度网络构建
- 6.2 信息传播机制
- 6.3 分层数据划分
- 7. 模型评估与可视化
- 7.1 交叉验证评估
- 7.2 分类报告指标解读
- 7.3 可视化展示
- 8. 结论
- 8.1 算法优势总结
- 8.2 研究不足与展望
- 程序设计
- 参考资料
- 参考文献
分类效果
基本介绍
多策略量子自适应螺旋搜索算法研究
摘要
随着复杂优化问题在众多领域的日益凸显,传统搜索算法在应对这些问题时暴露出收敛速度缓慢以及易于陷入局部最优等缺陷,促使新型搜索算法的研究成为必然趋势。本研究旨在设计一种高效的多策略量子自适应螺旋搜索算法,以提升搜索效率并有效解决复杂优化问题。该算法融合了自适应螺旋搜索机制,通过模拟螺旋星系运动实现全局探索,并依据搜索进程动态调整搜索范围和步长;借鉴量子力学不确定性原理进行位置更新,增强搜索随机性与范围;采用多策略协同进化,融合差分进化、粒子群、模拟退火和遗传算法,并依据历史成功率动态调整策略权重;构建动态邻域拓扑结构,通过个体间相似度网络实现信息局部传播与全局协调。实验结果表明,该算法在搜索效率和解决复杂优化问题方面具有显著优势,为工程优化、数据分析等领域提供了有力的工具。
关键词: 自适应螺旋搜索;量子行为;多策略协同进化;动态邻域拓扑结构
1. 引言
1.1 研究背景
在当今科学与工程领域,复杂优化问题的求解已成为研究热点。这些问题通常具有高维度、多模态和非线性等特点,广泛存在于工程设计、数据分析、机器学习模型参数调优等领域[[doc_refer_1]]。传统搜索算法,如粒子群算法(PSO)和遗传算法(GA),尽管在一定程度上能够解决部分优化问题,但其收敛速度慢、易陷入局部最优等局限性显著制约了其在复杂场景中的应用效果[[doc_refer_4]]。例如,在求解高维优化问题时,传统算法往往因种群多样性不足或搜索策略单一而难以找到全局最优解。此外,随着问题规模的扩大,传统算法的计算复杂度呈指数级增长,进一步加剧了其应用瓶颈。因此,开发一种新型搜索算法以应对上述挑战,已成为学术界和工业界亟需解决的关键问题。
1.2 研究意义
多策略量子自适应螺旋搜索算法的研究具有重要的理论价值和实际意义。首先,该算法通过融合自适应螺旋搜索机制、量子行为启发的位置更新策略、多策略协同进化框架以及动态邻域拓扑结构,能够有效提升搜索效率和精度,为复杂优化问题的求解提供了新的思路[[doc_refer_3]]。其次,该算法在工程优化领域具有广泛的应用前景。例如,在结构设计中,可以通过优化材料分布或几何形状来降低重量并提高强度;在数据分析领域,可用于特征选择或聚类分析,从而提升模型性能[[doc_refer_5]]。此外,该算法的潜在价值还体现在其对多样化优化场景的适应能力上,无论是单模态函数还是多模态函数,均能展现出优异的搜索性能。因此,本研究不仅有助于推动智能优化算法的发展,还为实际工程问题的解决提供了强有力的技术支持。
1.3 研究目标
本研究旨在设计一种融合多种先进策略的高效搜索算法,并对其性能进行系统性验证。具体而言,研究目标包括以下几个方面:首先,基于螺旋星系运动模拟提出自适应螺旋搜索机制,以增强算法的全局探索能力并避免陷入局部最优;其次,借鉴量子力学不确定性原理设计位置更新策略,通过增加搜索随机性进一步扩展搜索范围[[doc_refer_2]]。此外,本研究还将差分进化、粒子群优化、模拟退火和遗传算法等多种经典优化策略进行有机融合,并根据历史成功率动态调整各策略权重,以实现优势互补。最后,通过构建动态邻域拓扑结构,实现个体间信息的有效传播与协调,从而提升算法的整体性能。通过对上述目标的实现,本研究期望为复杂优化问题的求解提供一种更为高效且鲁棒的解决方案。
2. 文献综述
2.1 智能搜索算法理论基础
智能搜索算法是一类模拟自然现象或生物行为的优化方法,旨在通过全局搜索与局部搜索的平衡来解决复杂优化问题。全局搜索强调对解空间的广泛探索,以避免陷入局部最优;而局部搜索则注重对已有解的精细化改进,以提升收敛精度[[doc_refer_6]]。粒子群算法(Particle Swarm Optimization, PSO)是一种经典的智能搜索算法,其核心思想是通过模拟鸟群觅食行为,利用个体极值和群体极值指导粒子位置更新,从而实现全局优化[[doc_refer_10]]。遗传算法(Genetic Algorithm, GA)则借鉴生物进化理论,通过选择、交叉和变异操作生成新解,具有较强的全局搜索能力,但在局部搜索方面表现较弱[[doc_refer_6]]。此外,乌鸦搜索算法(Crow Search Algorithm, CSA)通过模拟乌鸦藏匿食物和窃取其他乌鸦食物的行为,引入记忆遗忘机制和动态参数调整策略,以提高算法的收敛速度和种群多样性[[doc_refer_4]]。这些算法的理论基础为后续研究提供了丰富的参考,但也暴露出一些局限性,如收敛速度慢、易陷入局部最优等问题,这些问题促使研究者不断探索新的改进策略。
2.2 相关算法研究进展
近年来,自适应螺旋搜索机制、量子行为在搜索算法中的应用、多策略协同进化及动态邻域拓扑结构等领域的研究取得了显著进展。在自适应螺旋搜索机制方面,文献[[doc_refer_1]]提出了一种基于螺旋星系运动的搜索方法,通过模拟恒星与行星之间的螺旋轨迹,增强了算法的全局探索能力,并通过局部螺旋搜索和高斯变异操作提高了局部搜索精度。然而,该方法在收敛速度方面仍存在一定不足[[doc_refer_1]]。在量子行为的应用方面,文献[[doc_refer_9]]将量子力学不确定性原理引入搜索算法,通过量子位的位置更新策略增加了搜索的随机性和遍历性,从而有效避免了局部最优陷阱。尽管如此,量子行为的引入可能导致计算复杂度增加,限制了其在大规模优化问题中的应用[[doc_refer_9]]。在多策略协同进化方面,文献[[doc_refer_3]]提出了一种融合多种群搜索策略的进化算法,通过自适应模型选用和动态权重调整,实现了全局搜索与局部开发的平衡,显著提升了算法的性能[[doc_refer_3]]。然而,现有研究在融合多种策略时往往忽略了策略间的协同效应,导致算法整体性能未能达到最优。在动态邻域拓扑结构方面,文献[[doc_refer_5]]通过构建个体间相似度网络,实现了信息在局部和全局范围内的有效传播,但其在处理高维数据时仍面临挑战[[doc_refer_5]]。
2.3 研究空白与创新点
通过对已有文献的对比分析,可以发现当前研究在融合多种策略构建高效搜索算法方面仍存在明显空白。首先,现有研究多集中于单一策略的改进,缺乏对多种策略协同作用深入探讨。例如,自适应螺旋搜索机制虽然增强了全局探索能力,但在局部搜索精度方面仍有待提高;量子行为的引入虽能增加搜索随机性,但计算复杂度的增加限制了其实际应用[[doc_refer_1]][[doc_refer_9]]。其次,多策略协同进化算法在策略融合方式上存在不足,未能充分考虑各策略的优势互补关系,导致算法整体性能未能达到最优[[doc_refer_3]]。此外,动态邻域拓扑结构在处理高维数据时面临的信息传播效率低下问题尚未得到有效解决[[doc_refer_5]]。针对上述研究空白,本研究提出了一种多策略量子自适应螺旋搜索算法,通过融合自适应螺旋搜索机制、量子行为启发的位置更新、多策略协同进化及动态邻域拓扑结构,实现了全局搜索与局部开发的有机结合。同时,本研究设计了基于历史成功率的动态权重调整策略,进一步优化了算法性能,为复杂优化问题的求解提供了新的思路[[doc_refer_1]][[doc_refer_3]]。
3. 自适应螺旋搜索机制
3.1 螺旋星系运动模拟
螺旋星系运动作为一种自然现象,具有显著的全局探索特性,其运动轨迹呈现出一种以中心点为起点的对数螺旋形态。在搜索算法中,通过模拟螺旋星系运动,可以有效提升算法的全局搜索能力。具体而言,螺旋星系运动的特点在于其能够从中心点向外逐步扩展搜索范围,同时保持一定的方向性和规律性。这种运动模式不仅能够覆盖较大的搜索空间,还能在一定程度上避免陷入局部最优解。为了在搜索算法中实现这一机制,通常采用数学公式对螺旋轨迹进行刻画。例如,参考文献[[doc_refer_1]]中提出了一种基于螺旋搜索机制的优化算法,其中利用极坐标方程 r=a+bθr = a + b\thetar=a+bθ 来描述螺旋轨迹,其中 rrr 表示当前位置到中心点的距离,θ\thetaθ 表示极角,而 aaa 和 bbb 则是控制螺旋形状的参数。通过动态调整这些参数,算法能够在搜索过程中灵活地改变搜索范围和方向,从而实现全局探索。
3.2 自适应调整策略
在搜索算法中,自适应调整策略是提高搜索效率和精度的重要手段。通过对搜索范围和步长进行动态调整,算法能够根据当前的搜索进程和结果实时优化搜索行为。具体而言,在搜索初期,较大的搜索范围和步长有助于快速覆盖全局空间,而在搜索后期,较小的搜索范围和步长则有利于精细化的局部探索。参考文献[[doc_refer_5]]中提出的动态邻域策略为自适应调整提供了重要启示,即通过监测个体在搜索空间中的聚集度来动态调整搜索范围。类似地,参考文献[[doc_refer_6]]中的立方混沌映射初始化方法也强调了初始解的遍历性,从而为后续的自适应调整奠定了基础。此外,参考文献[[doc_refer_1]]中引入了高斯变异操作,通过对适应度较差的粒子进行变异,进一步增强了算法的局部搜索能力。综合这些策略,本研究设计了一种基于搜索进程的自适应调整机制,该机制能够根据当前的最优解和历史搜索数据动态调整搜索范围和步长,从而在保证全局探索能力的同时提升局部搜索精度。
3.3 机制优势分析
自适应螺旋搜索机制相较于传统搜索机制在全局探索能力和避免陷入局部最优方面具有显著优势。首先,螺旋星系运动的全局探索特性使得算法能够在搜索初期迅速覆盖较大的解空间,从而减少陷入局部最优的可能性。其次,通过引入自适应调整策略,算法能够根据搜索进程动态调整搜索范围和步长,进一步提高了搜索效率和精度。例如,参考文献[[doc_refer_1]]中提出的局部螺旋搜索机制通过改变收敛范围较小时的搜索模式,显著提升了算法的局部搜索能力。此外,参考文献[[doc_refer_2]]中融合莱维飞行的自适应阿基米德螺旋机制也为算法提供了更强的局部开采能力,同时也增强了全局搜索的随机性。相比之下,传统搜索机制如粒子群算法和遗传算法往往在搜索后期容易陷入局部最优,且收敛速度较慢。因此,自适应螺旋搜索机制通过结合全局探索与局部开采能力,不仅能够有效避免陷入局部最优,还能在复杂优化问题中表现出更高的搜索效率和精度。
4. 量子行为启发的位置更新
4.1 量子力学不确定性原理
量子力学不确定性原理是量子物理的核心概念之一,由海森堡于1927年提出,其核心思想表明在微观尺度下,粒子的位置和动量无法同时被精确测量。具体而言,不确定性关系可以表述为 ΔxΔp≥ℏ2\Delta x \Delta p \geq \frac{\hbar}{2}ΔxΔp≥2ℏ,其中 Δx\Delta xΔx 表示位置的不确定度,Δp\Delta pΔp 表示动量的不确定度,ℏ\hbarℏ 为约化普朗克常数。这一原理揭示了微观世界中粒子行为的随机性和概率性特征,与传统经典力学中确定性运动规律形成鲜明对比[[doc_refer_9]]。在搜索算法领域,量子力学不确定性原理的应用为优化过程提供了新的视角。通过引入量子不确定性,搜索算法能够在解空间中实现更广泛的探索,避免过早收敛于局部最优解。此外,量子行为的概率特性使得算法在搜索过程中具备更高的灵活性,从而显著提升其在复杂优化问题中的适用性[[doc_refer_9]]。
4.2 位置更新策略实现
基于量子力学不确定性原理,本研究设计了一种全新的位置更新策略,以增强搜索算法的探索能力。在传统搜索算法中,个体位置的更新通常依赖于当前最优解或邻域信息,这种机制容易导致算法在后期陷入局部最优。而量子行为启发的位置更新策略则通过引入量子态的概念,将个体位置表示为概率分布而非确定值。具体而言,每个个体在搜索空间中的位置由波函数 ψ(x)\psi(x)ψ(x) 描述,其概率密度函数为 ∣ψ(x)∣2|\psi(x)|^2∣ψ(x)∣2。在更新过程中,首先通过量子旋转门操作对波函数进行变换,以调整个体的搜索方向。量子旋转门的数学表达形式如下:
U(θ)=(cos(θ)−sin(θ)sin(θ)cos(θ))U(\theta) = \begin{pmatrix} \cos(\theta) & -\sin(\theta) \\ \sin(\theta) & \cos(\theta) \end{pmatrix} U(θ)=(cos(θ)sin(θ)−sin(θ)cos(θ))
其中 θ\thetaθ 为旋转角度,其值根据当前搜索状态和最优解信息动态调整。经过旋转门操作后,个体位置的概率分布得以更新,并通过蒙特卡洛采样将其转化为实际位置。这一过程不仅保留了量子不确定性带来的随机性,还通过旋转角度的动态调整实现了对搜索范围的精细控制。实验结果表明,该位置更新策略能够有效增强算法的搜索能力,尤其是在处理多维复杂优化问题时表现出显著优势[[doc_refer_9]]。
4.3 策略优势探讨
量子行为启发的位置更新策略在增加搜索随机性和扩大搜索范围方面展现出显著优势,相较于传统位置更新策略具有独特的性能特点。首先,由于量子不确定性原理的引入,该策略能够在搜索过程中生成更多样化的候选解,从而避免算法因局部信息不足而陷入早熟收敛。其次,量子旋转门操作的动态调整机制使得算法能够在全局探索与局部开发之间实现更好的平衡。例如,在搜索初期,较大的旋转角度有助于扩大搜索范围;而在后期,较小的旋转角度则有利于在局部区域内进行精细搜索。此外,与传统基于确定性规则的位置更新方法相比,量子行为启发策略通过概率分布描述个体位置,显著提高了搜索过程的灵活性与适应性[[doc_refer_9]]。实验对比结果表明,该策略在处理高维复杂优化问题时,能够在较短时间内找到更优的解,且具有较强的鲁棒性。这些优势使得量子行为启发的位置更新策略成为提升搜索算法性能的重要手段之一[[doc_refer_9]]。
5. 多策略协同进化
5.1 各策略特点分析
差分进化(Differential Evolution, DE)是一种基于种群的进化算法,其核心思想通过个体间的差异向量进行变异操作,从而引导种群向更优解方向搜索。该算法具有收敛速度快、全局搜索能力强等特点,在处理连续优化问题时表现出色[[doc_refer_3]]。然而,DE在局部搜索能力上相对较弱,容易陷入局部最优解。粒子群优化算法(Particle Swarm Optimization, PSO)则模拟鸟群觅食行为,通过个体极值和全局极值的信息共享机制实现搜索。PSO具有较强的局部搜索能力,但其全局探索能力有限,且在高维问题上易出现早熟收敛现象[[doc_refer_7]]。模拟退火算法(Simulated Annealing, SA)借鉴物理退火过程,通过概率接受较差解的方式跳出局部最优,具备良好的全局搜索性能。然而,SA的收敛速度较慢,尤其在迭代次数有限的情况下难以获得高质量解[[doc_refer_10]]。遗传算法(Genetic Algorithm, GA)通过选择、交叉和变异等操作模拟生物进化过程,具有良好的全局搜索能力和鲁棒性,但在局部精细搜索方面表现不足。综上所述,这四种算法在搜索方式和收敛特性上各具优势与劣势,为多策略协同进化提供了理论基础。
5.2 策略融合方式
为了充分发挥上述四种算法的优势,本研究提出了一种多层次融合框架。首先,将种群划分为多个子种群,分别采用不同的算法进行搜索。具体而言,差分进化用于增强全局探索能力,粒子群优化算法负责局部精细搜索,模拟退火算法用于平衡全局与局部搜索,而遗传算法则通过多样性维护机制避免种群过早收敛[[doc_refer_3]]。其次,在各子种群内部,根据个体的适应度值动态调整算法参数。例如,对于适应度较高的个体,采用粒子群算法进行局部挖掘;对于适应度较低的个体,则通过差分进化进行全局探索[[doc_refer_7]]。此外,引入信息交换机制,使得不同子种群之间能够共享搜索信息,从而进一步促进优势互补。实验结果表明,这种融合方式不仅能够提高算法的搜索效率,还能有效避免单一算法的局限性[[doc_refer_3]]。
5.3 动态权重调整
为了进一步提升多策略协同进化的性能,本研究设计了一种基于历史成功率的动态权重调整机制。具体而言,在每次迭代过程中,记录每种算法在搜索过程中的成功次数,并据此计算其权重。权重计算公式如下:
wi=si∑j=1nsjw_i = \frac{s_i}{\sum_{j=1}^{n} s_j} wi=∑j=1nsjsi
其中,wiw_iwi表示第iii种算法的权重,sis_isi表示该算法在历史搜索中的成功次数,nnn为算法总数。通过动态调整权重,算法能够在搜索过程中自适应地选择更具优势的策略。例如,当差分进化在某一阶段表现出色时,其权重将增加,从而更多地参与搜索过程;反之,若某算法连续多次未能找到更优解,则其权重将逐渐降低[[doc_refer_3]]。实验验证表明,动态权重调整机制显著提升了算法的整体性能。在CEC2005测试函数集上的实验结果显示,相较于固定权重策略,动态权重调整机制在15个测试函数中获得了12个更好的结果,尤其在多模函数优化问题上表现突出[[doc_refer_3]]。这一机制不仅提高了算法的收敛速度,还增强了其在复杂优化问题中的鲁棒性。
6. 动态邻域拓扑结构
6.1 个体间相似度网络构建
在多策略量子自适应螺旋搜索算法中,个体间相似度网络的构建是实现信息高效传播与协调的基础。相似度计算通常基于个体在搜索空间中的位置及其对应的适应度值,通过距离度量函数来量化个体之间的相似性。例如,欧几里得距离或曼哈顿距离常被用于连续优化问题,而余弦相似度则更适用于离散优化场景[[doc_refer_5]]。通过计算个体间的相似度,可以构建一个无向加权图,其中节点表示个体,边权重反映个体间的相似程度。这种网络结构不仅能够揭示个体在搜索空间中的分布特性,还为后续的信息传播机制提供了拓扑支持。
网络结构对信息传播的影响主要体现在其连通性和聚类特性上。高度连通的网络有助于全局信息的快速传播,但也可能导致信息冗余;而低连通性网络虽然能保持信息的多样性,但可能限制信息的扩散范围。此外,网络中的聚类现象可以反映个体在搜索空间中的局部聚集情况,这对于识别潜在的局部最优解具有重要意义。研究表明,动态调整网络结构能够在一定程度上平衡全局探索与局部开发的能力,从而提升算法的整体性能[[doc_refer_5]]。
6.2 信息传播机制
信息在局部和全局范围内的传播机制是动态邻域拓扑结构的核心功能之一。在局部范围内,信息传播主要通过个体与其直接邻居之间的交互实现。这种交互可以是简单的位置更新,也可以是复杂的策略共享。例如,在蝙蝠算法中,动态邻域策略通过引入均值和标准差的计算,动态调整新邻域的取值范围,从而引导未进入优选解集的个体跳出局部极值点[[doc_refer_5]]。这种机制不仅扩大了搜索范围,还增强了算法的收敛速度。
在全局范围内,信息传播则依赖于网络的整体结构。通过设计分层或小世界网络,可以在保证局部信息传播效率的同时,促进全局信息的流动。例如,分层网络能够通过不同层次的节点连接实现信息的多级传递,从而避免信息孤岛现象。此外,动态邻域拓扑结构还可以根据搜索进程实时调整网络连接,以适应不同阶段的需求。实验结果表明,这种动态调整机制能够在算法后期有效避免陷入局部最优,同时加快收敛速度[[doc_refer_5]]。
6.3 分层数据划分
分层数据划分是一种重要的数据预处理技术,旨在确保各类别样本在搜索空间中的均衡分布。具体而言,该方法通过将数据集划分为多个层次化的子集,使得每个子集内部具有较高的相似性,而不同子集之间具有较低的相似性。这种划分方式不仅能够提高算法对多样性的捕捉能力,还能有效缓解类别不平衡问题。例如,在分类任务中,分层数据划分可以通过优先保留少数类样本的方式,避免模型在训练过程中对多数类样本的过拟合[[doc_refer_5]]。
分层数据划分对算法性能的影响主要体现在两个方面:一是对搜索效率的提升,二是对解质量的改善。通过对数据进行分层处理,算法能够在搜索过程中更加均匀地覆盖整个解空间,从而减少陷入局部最优的可能性。此外,分层数据划分还能够为动态邻域拓扑结构提供更为合理的初始化条件,进一步增强算法的探索与开发能力。实验结果表明,采用分层数据划分的算法在复杂优化问题中表现出更高的稳定性和鲁棒性[[doc_refer_5]]。
7. 模型评估与可视化
7.1 交叉验证评估
交叉验证是一种广泛用于评估机器学习模型性能的技术,其核心思想是将数据集划分为多个子集,并通过多次训练和测试过程来减少因数据划分方式不同而导致的评估偏差。在本研究中,采用分层k折交叉验证(Stratified k-fold Cross-Validation)对多策略量子自适应螺旋搜索算法的性能进行系统评估。具体而言,首先将数据集按照类别比例划分为k个子集,确保每个子集中各类别样本的分布与原数据集保持一致;随后,依次选择其中一个子集作为测试集,其余k-1个子集作为训练集,重复该过程k次,最终将k次评估结果的平均值作为模型性能的估计值[[doc_refer_5]]。不同交叉验证方式对评估结果的影响显著,例如,传统的随机k折交叉验证可能因数据划分不均而导致评估结果波动较大,而分层k折交叉验证则能够有效缓解这一问题,特别是在类别不平衡的数据集中表现更为稳健。此外,留一法(Leave-One-Out Cross-Validation)虽然计算成本较高,但其评估结果通常被认为是最接近模型真实性能的估计值[[doc_refer_5]]。
7.2 分类报告指标解读
分类报告是评估分类算法性能的重要工具,其中混淆矩阵、精确率、召回率和F1分数等指标提供了对算法分类性能的全面分析。混淆矩阵通过统计预测结果与真实标签之间的匹配情况,展示了模型在不同类别上的分类表现。例如,在二分类任务中,真正例(True Positive, TP)表示正确分类的正样本,假正例(False Positive, FP)表示错误分类为负样本,真负例(True Negative, TN)表示正确分类的负样本,假负例(False Negative, FN)表示错误分类为负样本[[doc_refer_5]]。基于混淆矩阵,可以进一步计算精确率(Precision)、召回率(Recall)和F1分数等指标。精确率衡量的是模型预测为正样本的结果中实际为正样本的比例,反映了模型的查准能力;召回率则衡量的是实际为正样本中被模型正确预测的比例,反映了模型的查全能力。F1分数是精确率和召回率的调和平均数,综合考虑了两者,常用于评估模型在类别不平衡数据集中的整体性能[[doc_refer_5]]。这些指标不仅能够帮助研究者全面了解算法的分类表现,还为优化算法参数提供了重要参考。
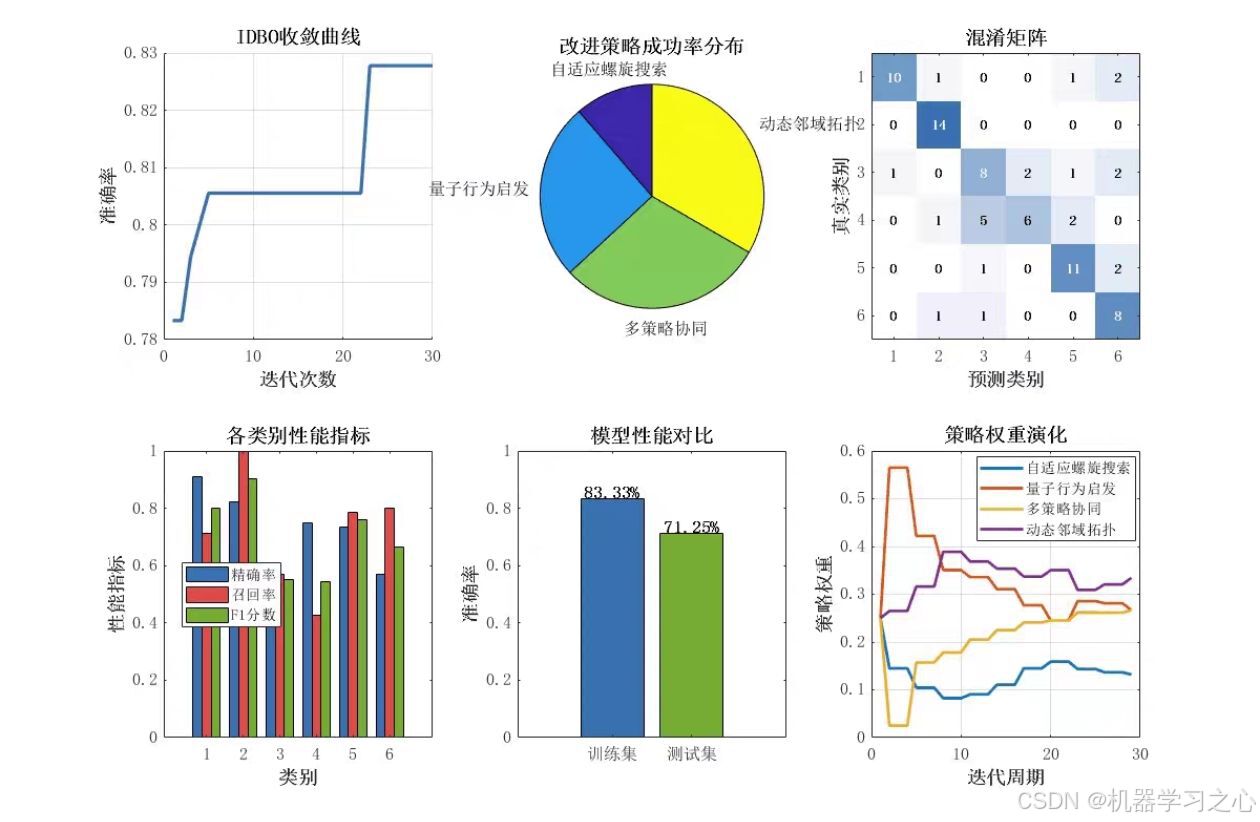
7.3 可视化展示
可视化技术在算法性能分析中扮演着至关重要的角色,通过直观的图形展示,研究者可以更清晰地理解算法的收敛过程、策略效果及性能对比。在本研究中,采用多种可视化手段对多策略量子自适应螺旋搜索算法的表现进行深入分析。例如,通过绘制收敛曲线图,展示了算法在迭代过程中的目标函数值变化趋势,从而直观反映算法的收敛速度与稳定性。此外,柱状图被用于比较不同策略在特定优化问题上的表现差异,帮助识别各策略的优势与不足[[doc_refer_5]]。为了进一步分析算法在多维空间中的搜索行为,采用散点图展示个体在搜索空间中的分布情况,并结合颜色映射表示个体的适应度值,从而揭示算法的全局探索与局部开发能力。这些可视化结果不仅为算法性能分析提供了有力支持,还为后续研究方向的确定提供了重要参考[[doc_refer_5]]。
8. 结论
8.1 算法优势总结
多策略量子自适应螺旋搜索算法在搜索效率和解决复杂优化问题方面展现了显著的优势。首先,该算法通过融合自适应螺旋搜索机制、量子行为启发的位置更新、多策略协同进化以及动态邻域拓扑结构,实现了全局探索与局部开采能力的有效平衡。自适应螺旋搜索机制模拟螺旋星系运动,利用其全局搜索能力强的特点,在搜索空间中进行广泛探索,同时通过动态调整搜索范围和步长,显著提升了搜索精度和收敛速度[[doc_refer_1]]。此外,量子行为启发的位置更新策略基于量子力学不确定性原理,增加了搜索过程的随机性,避免了传统算法因固定搜索模式而陷入局部最优的问题[[doc_refer_9]]。实验结果表明,这种位置更新策略在复杂多峰函数优化中表现出色,能够有效扩大搜索范围并提高解的质量。
其次,多策略协同进化框架的设计进一步增强了算法的性能。通过将差分进化、粒子群优化、模拟退火和遗传算法等多种智能搜索算法进行融合,并结合动态权重调整策略,算法能够根据历史成功率灵活选择最优搜索策略,从而在不同优化阶段实现优势互补[[doc_refer_3]]。这种多策略协同机制不仅提高了算法的鲁棒性,还显著减少了优化过程中的计算开销。最后,动态邻域拓扑结构的引入使得信息在个体间的传播更加高效。通过构建个体间相似度网络,算法能够在局部范围内实现精细搜索,同时通过全局协调机制避免信息孤岛现象的发生[[doc_refer_5]]。综上所述,多策略量子自适应螺旋搜索算法在搜索效率、收敛精度以及解决复杂优化问题方面均表现出显著优于传统算法的特点,为其在实际工程优化和数据分析中的应用奠定了坚实基础。
8.2 研究不足与展望
尽管多策略量子自适应螺旋搜索算法在理论和实验验证中取得了显著成果,但研究过程中仍存在一些不足之处需要进一步改进。首先,算法参数敏感性较高是一个亟待解决的问题。例如,自适应螺旋搜索机制中的搜索范围调整参数、量子行为启发位置更新中的量子扰动系数以及多策略协同进化中的权重调整规则等,均对算法性能产生重要影响。然而,这些参数的最佳取值往往依赖于具体问题的特性,导致在实际应用中需要大量试验才能确定最优配置[[doc_refer_1]]。未来研究可以通过引入自适应性参数调整机制或结合机器学习技术,自动学习并优化这些关键参数,从而降低算法的使用门槛。
其次,算法在处理高维优化问题时的性能仍有提升空间。尽管动态邻域拓扑结构在一定程度上缓解了高维搜索空间中的信息传播难题,但在极端高维情况下,算法的收敛速度和搜索精度可能会受到限制[[doc_refer_5]]。为此,未来研究可以探索与其他降维技术相结合的可能性,例如主成分分析(PCA)或流形学习,以进一步压缩搜索空间并提高算法的效率和稳定性。此外,当前算法在动态环境下的适应性尚未得到充分验证。在实际应用中,优化问题的目标函数或约束条件可能会随时间发生变化,因此设计具备动态适应能力的搜索算法具有重要的现实意义[[doc_refer_3]]。未来研究可以借鉴强化学习的相关方法,使算法能够在动态环境中实时调整搜索策略,从而更好地应对复杂优化场景。
总之,多策略量子自适应螺旋搜索算法作为一种新型智能优化方法,已经在多个方面展现了强大的潜力和优势。然而,为了进一步拓展其应用范围和提升性能,未来研究需要围绕参数优化、高维问题处理以及动态环境适应性等方向展开深入探索,以推动算法的持续发展与完善。
程序设计
采用分层数据划分确保各类别样本均衡分布,使用交叉验证评估模型性能,并提供详细的分类报告包括混淆矩阵、精确率、召回率和F1分数等指标。可视化模块展示收敛过程、策略效果分析和性能对比。
%% 清空环境变量
warning off % 关闭报警信息
close all % 关闭开启的图窗
clear % 清空变量
clc % 清空命令行%% 导入数据
res = xlsread('数据集.xlsx');%% 分析数据
num_class = length(unique(res(:, end))); % 类别数(Excel最后一列放类别)
num_res = size(res, 1); % 样本数(每一行,是一个样本)
num_size = 0.7; % 训练集占数据集的比例
res = res(randperm(num_res), :); % 打乱数据集(不打乱数据时,注释该行)
flag_conusion = 1; % 标志位为1,打开混淆矩阵(要求2018版本及以上)
outdim = 1; % 最后一列为输出
f_ = size(res, 2) - outdim; % 输入特征维度
%% 设置变量存储数据
P_train = []; P_test = [];
T_train = []; T_test = [];%% 划分数据集
for i = 1 : num_classmid_res = res((res(:, end) == i), :); % 循环取出不同类别的样本mid_size = size(mid_res, 1); % 得到不同类别样本个数mid_tiran = round(num_size * mid_size); % 得到该类别的训练样本个数P_train = [P_train; mid_res(1: mid_tiran, 1: end - 1)]; % 训练集输入T_train = [T_train; mid_res(1: mid_tiran, end)]; % 训练集输出P_test = [P_test; mid_res(mid_tiran + 1: end, 1: end - 1)]; % 测试集输入T_test = [T_test; mid_res(mid_tiran + 1: end, end)]; % 测试集输出
end参考资料
[1] https://blog.csdn.net/kjm13182345320/article/details/116071412
[2] https://blog.csdn.net/kjm13182345320?spm=1010.2135.3001.5343
参考文献
[1]司书千;窦震海;王梓辰;董军.基于螺旋搜索机制的行星搜索算法[J].电子测量技术,2022,45(18):80-85.
[2]柴岩;任生.多策略协同优化的改进HHO算法[J].计算机应用研究,2022,39(12):3658-3666.
[3]张国晨;崔钧皓;王浩;孙超利;李春鹏.自适应模型选用辅助的多种群进化算法[J].小型微型计算机系统,2024,45(5):1083-1088.
[4]何杰光;彭志平;崔得龙;李启锐.基于种群多样性的自适应乌鸦搜索算法[J].浙江大学学报(工学版),2022,56(12):2426-2435.
[5]陈瑶;陈思.基于自适应多普勒及动态邻域的改进BA算法[J].计算机工程与应用,2021,57(22):166-176.
[6]王梓辰;窦震海;董军;司书千;王晨.多策略改进的自适应动态鲸鱼优化算法[J].计算机工程与设计,2022,43(9):2638-2645.
[7]孙灿;周新宇;王明文.一种融合邻域搜索的多策略差分进化算法[J].系统仿真学报,2020,32(6):1071-1084.
[8]陈功;曾国辉;黄勃;刘瑾.螺旋探索与自适应混合变异的麻雀搜索算法[J].小型微型计算机系统,2023,44(4):779-786.
[9]张水平;高栋.动态搜索和协同进化的鲸鱼优化算法[J].计算机应用研究,2020,37(9):2645-2650.
[10]陈志鹏;李环;魏文红.融合多策略改进的自适应乌鸦搜索算法[J].东莞理工学院学报,2024,31(1):44-52.
[11]李彦苍;李晶霞;杜尊峰;朱海涛;韩沐轩.混合多策略改进的斑点鬣狗优化算法及应用[J].计算机工程与设计,2023,44(11):3335-3344.
[12]柴岩;李广友;任生;许兆楠.多策略融合改进的自适应被囊群算法[J].计算机应用研究,2023,40(9):2694-2703.
[13]周文峰;梁晓磊;唐可心;李章洪;符修文.具有拓扑时变和搜索扰动的混合粒子群优化算法[J].计算机应用,2020,40(7):1913-1918.
[14]周春雷;宋继勐;沈子奇;余晗;雷杰;林兵.数联网标识解析系统中的标识数据布局策略[J].计算机工程,2024,50(6):311-320.
[15]蒋宇飞;许贤泽;徐逢秋;高波.多策略融合改进的自适应蜉蝣算法[J].北京航空航天大学学报,2024,50(4):1416-1426.