【愚公系列】《MIoT.VC》003-构建基本仿真工作站(组件的属性、行为、视频展示)

💎【行业认证·权威头衔】
✔ 华为云天团核心成员:特约编辑/云享专家/开发者专家/产品云测专家
✔ 开发者社区全满贯:CSDN博客&商业化双料专家/阿里云签约作者/腾讯云内容共创官/掘金&亚马逊&51CTO顶级博主
✔ 技术生态共建先锋:横跨鸿蒙、云计算、AI等前沿领域的技术布道者
🏆【荣誉殿堂】
🎖 连续三年蝉联"华为云十佳博主"(2022-2024)
🎖 双冠加冕CSDN"年度博客之星TOP2"(2022&2023)
🎖 十余个技术社区年度杰出贡献奖得主
📚【知识宝库】
覆盖全栈技术矩阵:
◾ 编程语言:.NET/Java/Python/Go/Node…
◾ 移动生态:HarmonyOS/iOS/Android/小程序
◾ 前沿领域:物联网/网络安全/大数据/AI/元宇宙
◾ 游戏开发:Unity3D引擎深度解析
文章目录
- 🚀前言
- 🚀一、组件的属性和行为
-
- 🔎1.设置布局中组件的属性
- 🔎2.物料在布局中动起来的设定
- 🔎3.将工作站运行起来并制作展示视频
-
- 🦋3.1 将工作站运行起来
- 🦋3.2 制作展示视频
🚀前言
构建基本仿真工作站时,“组件的属性和行为” 是核心环节,它决定了仿真模型的物理特性、行为规则和求解条件。简单来说,就是为你添加到工作站布局中的各个“零件”(组件)赋予具体的数值和规则,让软件知道它们代表什么、如何相互作用以及如何被计算。
🚀一、组件的属性和行为
🔎1.设置布局中组件的属性
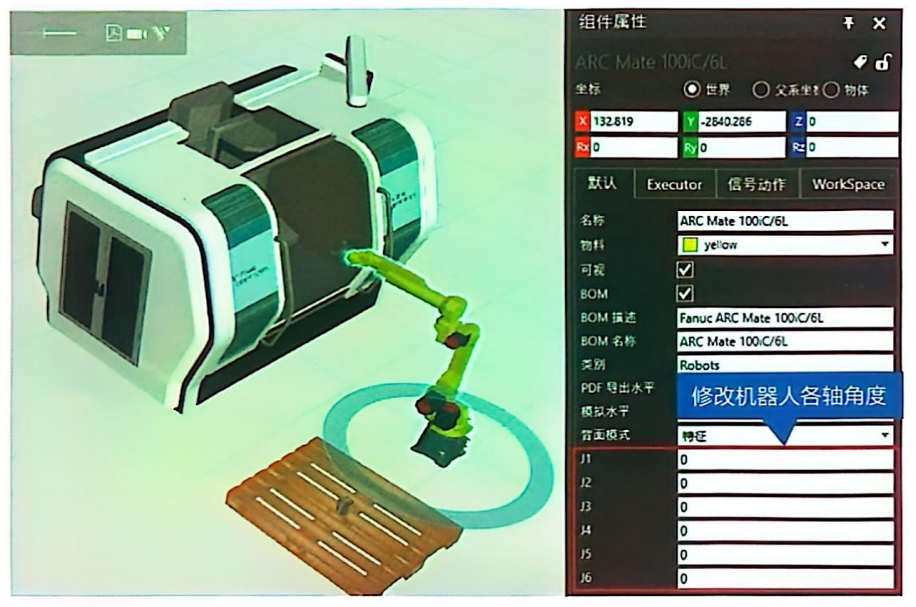
在“PnP”状态下选择机器人,右侧弹出机器人“组件属性”面板设置机器人每个轴的角度,如图所示。
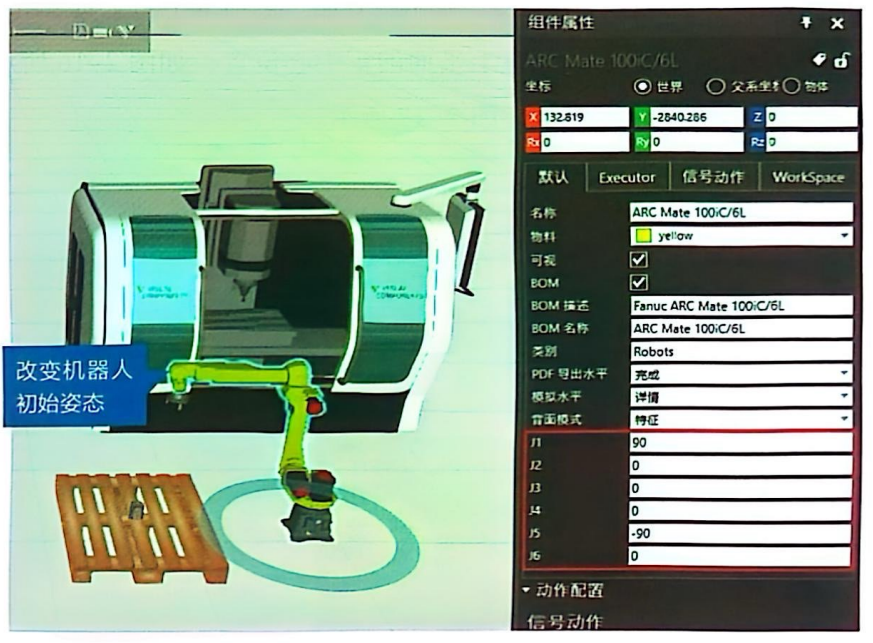
改变机器人的初始姿态,如图所示。
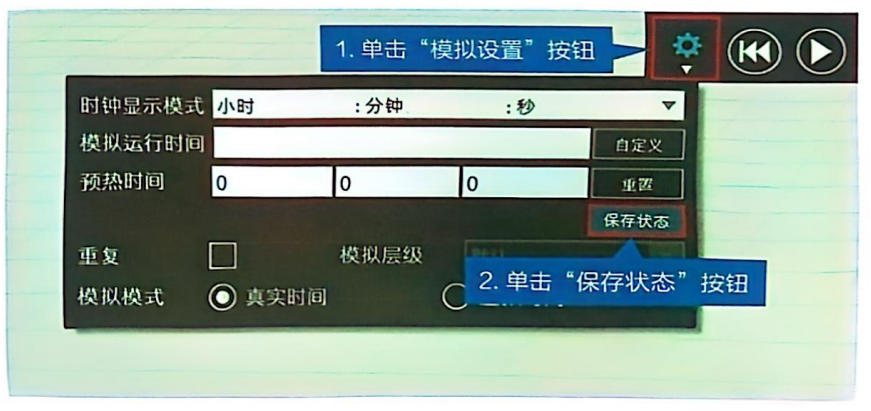
单击打开“模拟设置”按钮,单击“保存状态”按钮,将当前机器人的姿态设置为机器人的初始姿态,如图所示。
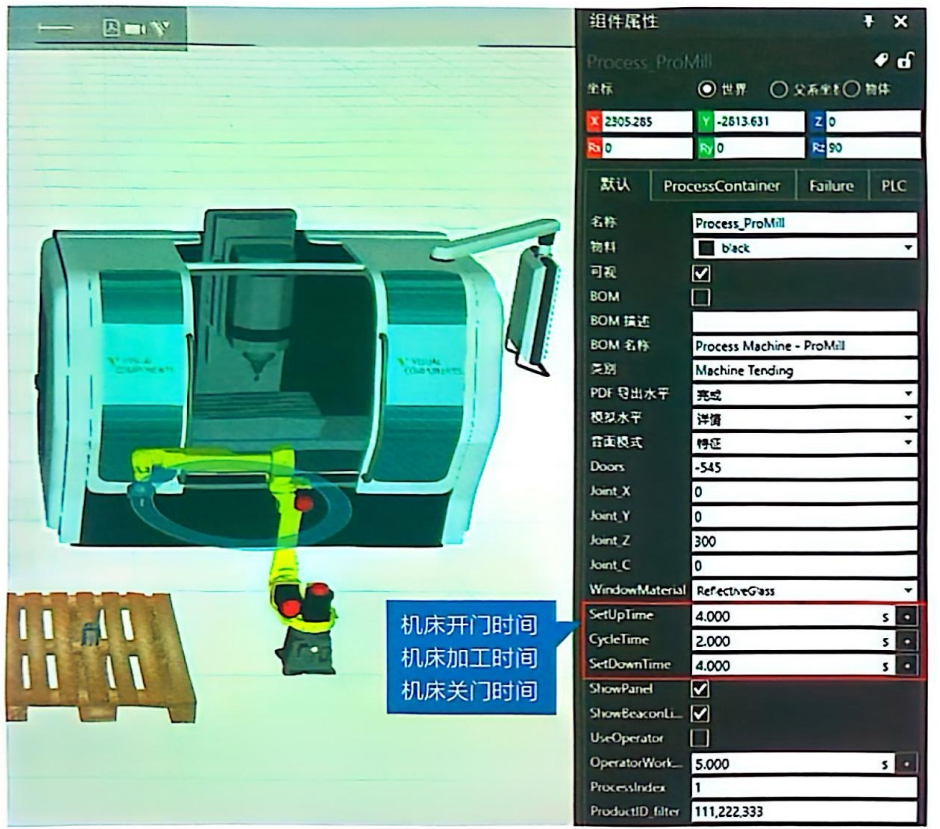
选择布局内的机床组件,在“组件属性”面板内找到对应的“SetUpTime”“CycleTime”“SetDownTime”三个时间参数,自行设置机床工作时间,如图所示。
🔎2.物料在布局中动起来的设定
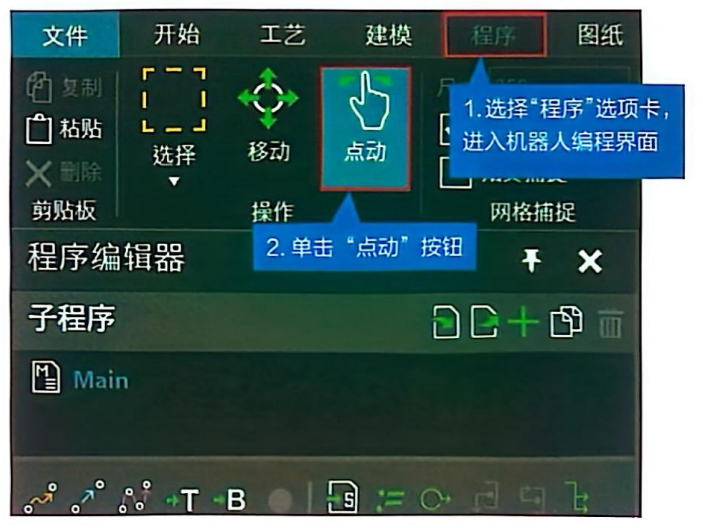
选择“程序”选项卡,进人机器人编程界面,在“操作”组中单击“点动”按钮,如图所示。
在“工具”列表框中选择“To0lTCP(工具坐标系)”选项如图所示。完成机器人末端坐标系位置的确定。工具坐标系为夹爪组件自带的坐标系,主要用于机器人在安装夹爪后定义路径坐标点。<