基于pyside6的通用机器人遥控控制界面
1. 前言
这两天需要帮一个朋友做一个简单的遥控控制界面,用于控制一台复合机器人(万向轮底盘+机械臂+旋转云台),在这里分享一下
2. 开发框架
由于朋友那边的控制接口都是使用python来写的,所以我这里也使用py来完成这个遥控界面的开发。但其实我自己的主语言是C和C++,之前界面都是使用Qt来完成,对py的使用不是很熟练,这里我就参考了ds(deepseek)老师的建议:py有一个GUI库叫做pyside6,其实就是Qt的py版本,当然还有一个叫PyQt的,这两个非常相似,不仅使用的控件API都是给C++Qt一样的,而且还能使用Qt Designer来设计界面。pyside6相比pyqt来说,开源协议较为宽松,这里我就选择使用pyside6
总结:python + pyside6
3. 效果预览
先来一起看看效果(随便找了个制作gif的工具,大家看看效果就好)
平移控制时使用的是右手坐标系,这是机器人行业的通用参考系,并且平移控制绑定到了键盘的方向键,可以使用i,k,j,l来控制上、下、左、右四个方向,组合一起可以控制左上、右上、左下、右下四个方向,一共八个方向,这里为什么不使用方向键呢,因为方向键的信号会被spin_box捕获,当方向键被按下时,会改变spin_box的数值,而不会被摇杆界面捕获到,这里应该可以使用一些方案来解决,这里不做尝试,有兴趣的可以去做优化,当然使用i,k,j,l代替方向键也是很常用的事情,不必在意
4. 环境安装
- 安装pyside6
pip install pydide6 -i https://pypi.tuna.tsinghua.edu.cn/simple
2.安装requests(可选,不需要将控制信号发送给控制服务器的不用安装)
pip install requests
5. 可能会用到的地方
- 打开designer
pyside6-designer
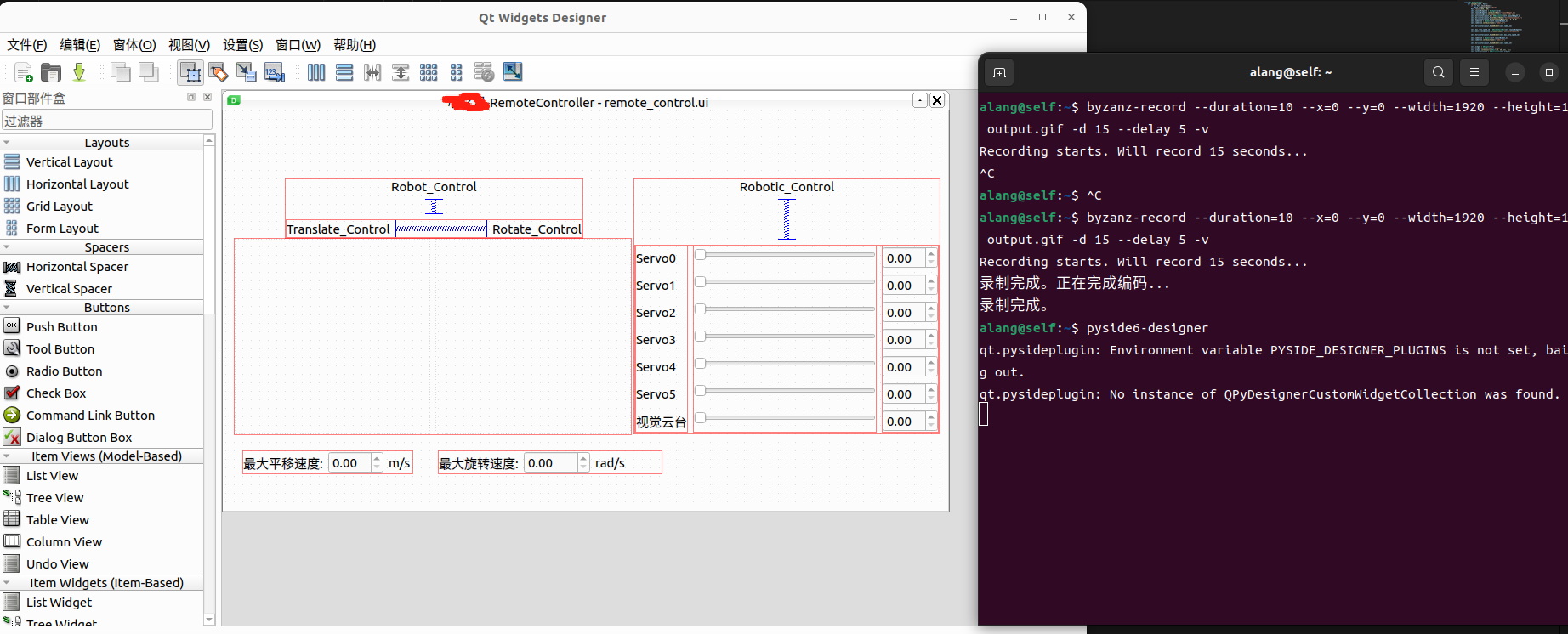
- designer生成的.ui文件生成.py文件
pyside6-uic remote_control.ui -o remote_control.py
6. 项目地址
github