python中学物理实验模拟:凸透镜成像和凹透镜成像
python中学物理实验模拟:凸透镜成像和凹透镜成像
凸透镜成像
凸透镜是指中间厚、边缘薄的透镜。它对光线有会聚作用,即光线通过凸透镜后会向主光轴方向偏折。
成像原理
基于光的折射,平行于主光轴的光线经凸透镜折射后会聚于焦点(F),过光心的光线传播方向不变。
焦点 (F) 和焦距 (f): 平行于主光轴的光线经凸透镜折射后实际会聚的点称为实焦点(在透镜的另一侧)。焦点到透镜光心的距离称为焦距 (f)。凸透镜有两个对称的实焦点(物方焦点和像方焦点)。
成像规律: 凸透镜成像的性质(大小、正倒、虚实)和位置主要取决于物体到透镜光心的距离(物距 u)与透镜焦距 (f) 的关系。
成像规律(物距 u、像距 v、焦距 f):
| 物距u范围 | 像距 (v) 范围 | 像的性质 | 应用实例 |
| u > 2f | f < v < 2f | 倒立、缩小的实像 | 照相机、监控摄像头 |
| u = 2f | v = 2f | 倒立、等大的实像 | 测焦距 |
| f < u < 2f | v > 2f | 倒立、放大的实像 | 投影仪、幻灯机 |
| u = f | 不成像(光线平行射出) | - | - |
| u < f | 像与物同侧,v > u | 正立、放大的虚像 | 放大镜、老花镜 |
关键点理解:
实像: 由实际光线会聚而成,可以用光屏接收(如投影在墙上)。像与物位于透镜异侧。
虚像: 是光线反向延长线的交点,不能用光屏直接接收,只能通过透镜观察到。像与物位于透镜同侧。
像距 (v): 像到透镜光心的距离。实像时 v 为正值;虚像时 v 为负值(在公式计算中体现)。
透镜公式: 1/f = 1/u + 1/v (符号规定:实物距 u 为正,实像距 v 为正,虚像距 v 为负,凸透镜焦距 f 为正)。
放大率 (m): m = |v/u| = 像高 / 物高。m > 1 表示放大,m < 1 表示缩小。
运行截图:

源码如下:
import tkinter as tk
from tkinter import ttk
import matplotlib
import matplotlib.pyplot as plt
from matplotlib.backends.backend_tkagg import FigureCanvasTkAgg
import numpy as np
import matplotlib.font_manager as fm# 配置中文字体
def find_chinese_font():fonts = ['SimHei', 'Microsoft YaHei', 'SimSun', 'STSong', 'KaiTi']existing_fonts = []for f in fonts:if any([f.lower() in font.lower() for font in fm.findSystemFonts(fontpaths=None)]):existing_fonts.append(f)return existing_fonts[0] if existing_fonts else Nonechinese_font = find_chinese_font()
if chinese_font:matplotlib.rcParams['font.family'] = [chinese_font, 'sans-serif']
else:print("警告: 找不到中文字体,将使用英文")matplotlib.rcParams['axes.unicode_minus'] = False # 正确显示负号class ConvexLensSimulator:def __init__(self, root):self.root = rootself.root.title("凸透镜成像模拟器")# 物理常量self.focal_length = 4 # 默认焦距8cmself.object_height = 2 # 物体高度4cm# 设置UIself.setup_ui()self.root.update() # 强制布局更新,处理Matplotlib 区域显示不完整def setup_ui(self):"""设置用户界面"""# 主界面布局self.main_frame = ttk.Frame(self.root)self.main_frame.pack(fill=tk.BOTH, expand=True)# 控制面板self.control_frame = ttk.LabelFrame(self.main_frame, text="参数控制")self.control_frame.pack(side=tk.LEFT, padx=10, pady=5, fill=tk.Y)# 可视化区域self.viz_frame = ttk.Frame(self.main_frame)self.viz_frame.pack(side=tk.RIGHT, fill=tk.BOTH, expand=True)# 创建控制组件self.create_controls()# 初始化绘图区域self.init_plot()# 首次更新self.update_display()def create_controls(self):"""创建控制组件"""# 物距滑块ttk.Label(self.control_frame, text="物距 u (cm):").grid(row=0, column=0, sticky="w", pady=(10,0))self.u_value = tk.DoubleVar(value=8)self.u_slider = ttk.Scale(self.control_frame, from_=5, to=30, variable=self.u_value, command=lambda _: self.update_display())self.u_slider.grid(row=1, column=0, sticky="ew")# 焦距滑块,焦距允许的范围 from_=3, to=15,ttk.Label(self.control_frame, text="焦距 f (cm):").grid(row=2, column=0, sticky="w", pady=(10,0))self.f_value = tk.DoubleVar(value=self.focal_length)self.f_slider = ttk.Scale(self.control_frame, from_=3, to=15, variable=self.f_value,command=lambda _: self.update_display())self.f_slider.grid(row=3, column=0, sticky="ew") # 物体高度滑块ttk.Label(self.control_frame, text="物体高度 (cm):").grid(row=4, column=0, sticky="w", pady=(10,0))self.height_value = tk.DoubleVar(value=self.object_height)self.height_slider = ttk.Scale(self.control_frame, from_=1, to=10, variable=self.height_value,command=lambda _: self.update_display())self.height_slider.grid(row=5, column=0, sticky="ew")# 信息显示self.info_text = tk.StringVar()ttk.Label(self.control_frame, textvariable=self.info_text, wraplength=200).grid(row=6, column=0, sticky="w", pady=10)def init_plot(self):"""初始化绘图区域"""self.fig = plt.Figure(figsize=(10, 6))self.ax = self.fig.add_subplot(111)self.ax.set_xlim(-25, 25)self.ax.set_ylim(-8, 8)self.ax.axhline(0, color='black', lw=0.5) # 主光轴# 设置固定的边距,避免tight_layout问题self.fig.subplots_adjust(left=0.08, right=0.95, top=0.95, bottom=0.08)self.canvas = FigureCanvasTkAgg(self.fig, master=self.viz_frame)self.canvas.get_tk_widget().pack(fill=tk.BOTH, expand=True)def calculate_image(self):"""计算像的位置和性质"""f = self.f_value.get()u = self.u_value.get()# 特殊情况:u = fif abs(u - f) < 0.01: # 使用小的容差值return np.inf, np.inf, "不成像"v = u*f/(u-f) # 高斯成像公式 1/u + 1/v = 1/fmagnification = -v/u # 放大率 m = -v/uimage_type = "实像" if v > 0 else "虚像"return v, magnification, image_typedef draw_optical_elements(self, u, v):"""绘制光学元件和光线"""self.ax.clear()self.ax.set_xlim(-25, 25)self.ax.set_ylim(-8, 8)self.ax.grid(True, linestyle='--', alpha=0.6)self.ax.axhline(0, color='black', lw=0.5) # 主光轴self.ax.axvline(0, color='black', lw=0.5, alpha=0.3) # 光心垂线# 标记焦点f = self.f_value.get()self.ax.plot([-f, f], [0, 0], 'ro', markersize=4)self.ax.text(-f-0.5, -0.5, 'F', fontsize=10)self.ax.text(f+0.5, -0.5, 'F′', fontsize=10)# 绘制透镜self.draw_lens()# 绘制物体object_height = self.height_value.get()self.ax.plot([-u, -u], [0, object_height], 'b-', lw=2) # 物体self.ax.text(-u-0.5, object_height+0.3, 'Object', fontsize=9)# 绘制像 - 添加对无穷大的检查if v not in [np.inf, -np.inf] and v is not None and not np.isinf(v):image_height = object_height * (-v/u) # 像的高度, 负号表示倒立style = 'r-' if v > 0 else 'r--'self.ax.plot([v, v], [0, image_height], style, lw=2)self.ax.text(v+0.5, image_height-0.3, 'Image', fontsize=9)# 绘制光线 - 只有当v不是无穷大时才绘制if v not in [np.inf, -np.inf] and not np.isinf(v):self.draw_rays(u, v, object_height)else:# 当u=f时,绘制特殊的平行光线self.draw_parallel_rays(u, object_height)def draw_parallel_rays(self, u, object_height):"""绘制u=f时的平行光线"""f = self.f_value.get()# 光线1:平行于主光轴入射,经过透镜后仍然平行self.ax.plot([-u, 0], [object_height, object_height], 'r-', lw=1.5)self.ax.plot([0, 25], [object_height, object_height], 'r-', lw=1.5)# 光线2:通过光心,不发生偏折 - 这条光线应该是直线self.ax.plot([-u, 25], [object_height, object_height], 'g-', lw=1.5)# 光线3:从物体顶端指向左焦点,经过透镜后平行于主光轴射出lens_height = object_height / 2 # 当u=f时,lens_height = object_height * f / (f + u) = object_height/2self.ax.plot([-u, 0], [object_height, lens_height], 'b-', lw=1.5)self.ax.plot([0, 25], [lens_height, lens_height], 'b-', lw=1.5)def draw_lens(self):"""绘制凸透镜"""# 垂直线self.ax.plot([0, 0], [-6, 6], 'black', lw=1)# 凸出部分arc_left = plt.matplotlib.patches.Arc((0, 0), 2, 12, theta1=90, theta2=270, color='black', lw=2)arc_right = plt.matplotlib.patches.Arc((0, 0), 2, 12, theta1=270, theta2=90, color='black', lw=2)self.ax.add_patch(arc_left)self.ax.add_patch(arc_right)def draw_rays(self, u, v, object_height):"""绘制光线"""try:f = self.f_value.get()if v > 0: # 实像image_height = -object_height * v / u# 光线1:平行于主光轴入射 -> 经过右焦点self.ax.plot([-u, 0], [object_height, object_height], 'r-', lw=1.5)self.ax.plot([0, v], [object_height, image_height], 'r-', lw=1.5)# 光线2:通过光心,不发生偏折self.ax.plot([-u, v], [object_height, image_height], 'g-', lw=1.5)# 光线3:【修正】从物体顶端经过左焦点到透镜,然后平行射出# 第一段:从物体顶端(-u, object_height)经过左焦点(-f, 0)到透镜(0, y)# 计算这条直线与透镜的交点# 直线斜率 = (0 - object_height) / (-f - (-u)) = -object_height / (u - f)# 从左焦点到透镜的延伸:y = 0 + 斜率 * (0 - (-f)) = 斜率 * flens_y = -object_height * f / (u - f)# 绘制:物体顶端 -> 左焦点 -> 透镜self.ax.plot([-u, -f, 0], [object_height, 0, lens_y], 'b-', lw=1.5)# 从透镜平行于主光轴射出到像点self.ax.plot([0, v], [lens_y, image_height], 'b-', lw=1.5)else: # 虚像 (u < f)image_height = -object_height * v / u # 虚像高度(正值,正立)# 光线1:平行于主光轴入射 -> 折射后反向延长经过右焦点self.ax.plot([-u, 0], [object_height, object_height], 'r-', lw=1.5)self.ax.plot([0, 25], [object_height, object_height - (object_height/f)*25], 'r-', lw=1.5)self.ax.plot([0, v], [object_height, image_height], 'r--', lw=1.5, alpha=0.7)# 光线2:通过光心,不发生偏折self.ax.plot([-u, 25], [object_height, object_height], 'g-', lw=1.5)self.ax.plot([0, v], [object_height, image_height], 'g--', lw=1.5, alpha=0.7)# 光线3:【修正】从物体顶端指向右焦点到透镜,然后平行射出# 第一段:从物体顶端(-u, object_height)指向右焦点(f, 0),延伸到透镜(0, y)# 直线斜率 = (0 - object_height) / (f - (-u)) = -object_height / (f + u)# 从物体到透镜:y = object_height + 斜率 * (0 - (-u)) = object_height + 斜率 * ulens_y = object_height - object_height * u / (f + u)# 绘制:物体顶端 -> 透镜(指向右焦点方向)self.ax.plot([-u, 0], [object_height, lens_y], 'b-', lw=1.5)# 从透镜平行于主光轴射出self.ax.plot([0, 25], [lens_y, lens_y], 'b-', lw=1.5)# 反向延长线到虚像self.ax.plot([0, v], [lens_y, image_height], 'b--', lw=1.5, alpha=0.7)except Exception as e:print(f"绘制光线错误: {str(e)}")import tracebacktraceback.print_exc()def update_display(self, event=None):"""更新整个界面"""try:self.focal_length = self.f_value.get()self.object_height = self.height_value.get()u = self.u_value.get()v, magnification, image_type = self.calculate_image()# 更新信息显示info = f"物距 u = {u:.1f} cm\n"info += f"焦距 f = {self.focal_length:.1f} cm\n"if v is not None:if not np.isinf(v):info += f"像距 v = {v:.1f} cm\n"else:info += "像距 v = ∞\n"if not np.isinf(magnification):info += f"放大率 m = {magnification:.2f}\n"else:info += "放大率 m = ∞\n"info += f"像类型:{image_type}"# 改进的成像规律判断 - 使用统一的容差值tolerance = 0.05 # 合适的容差值if abs(u - self.focal_length) < tolerance: # u ≈ finfo += "\n不成像"elif u > 2*self.focal_length + tolerance:info += "\n倒立缩小实像"elif abs(u - 2*self.focal_length) < tolerance: # u ≈ 2finfo += "\n倒立等大实像"elif u > self.focal_length + tolerance and u < 2*self.focal_length - tolerance:info += "\n倒立放大实像"elif u < self.focal_length - tolerance:info += "\n正立放大虚像"else:# 边界情况,根据image_type来判断if image_type == "不成像":info += "\n不成像"elif image_type == "实像":if abs(magnification) > 1:info += "\n倒立放大实像"elif abs(magnification) < 1:info += "\n倒立缩小实像"else:info += "\n倒立等大实像"else: # 虚像info += "\n正立放大虚像"self.info_text.set(info)# 重绘光学元件self.draw_optical_elements(u, v)self.canvas.draw()except Exception as e:import tracebacktraceback.print_exc()self.info_text.set(f"更新错误: {str(e)}")returnif __name__ == "__main__":root = tk.Tk()app = ConvexLensSimulator(root)root.geometry("1200x700") # 增大窗口尺寸root.mainloop()
凹透镜成像
凹透镜是指中间薄、边缘厚的透镜。它对光线有发散作用,即光线通过凹透镜后会远离主光轴方向偏折。
成像原理
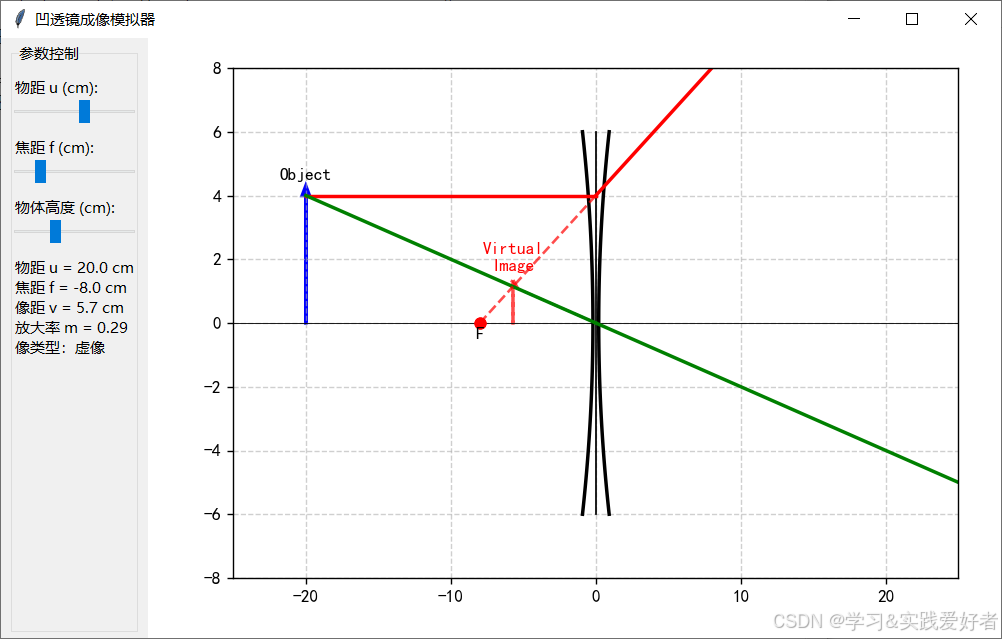
凹透镜成像也是基于光线的折射。光线通过凹透镜时,由于透镜的形状,光线会被发散。发散光线的反向延长线会交于一点,形成虚像。
凹透镜成像规律:
• 物距 u > 0(任意正值)
• 像距 v < 0(负值,表示虚像)
• 焦距 f < 0(负值)
• 像的性质:正立、缩小、虚像
• 数学关系:f < v < 0,即 |v| < |f| < u
透镜公式: 同样适用 1/f = 1/u + 1/v (凹透镜焦距 f 为负值,实物距 u 为正,虚像距 v 为负)。
应用
近视眼镜:矫正近视眼时,利用凹透镜的发散作用,使远处物体的像成在视网膜上。
门镜(猫眼):由凹透镜和凸透镜组合而成,凹透镜在外,使室外物体成缩小虚像,便于室内观察。
运行截图:
源码如下:
import tkinter as tk
from tkinter import ttk
import matplotlib
import matplotlib.pyplot as plt
from matplotlib.backends.backend_tkagg import FigureCanvasTkAgg
import numpy as np
import matplotlib.font_manager as fm# 配置中文字体
def find_chinese_font():fonts = ['SimHei', 'Microsoft YaHei', 'SimSun', 'STSong', 'KaiTi']existing_fonts = []for f in fonts:if any([f.lower() in font.lower() for font in fm.findSystemFonts(fontpaths=None)]):existing_fonts.append(f)return existing_fonts[0] if existing_fonts else Nonechinese_font = find_chinese_font()
if chinese_font:matplotlib.rcParams['font.family'] = [chinese_font, 'sans-serif']
else:print("警告: 找不到中文字体,将使用英文")matplotlib.rcParams['axes.unicode_minus'] = False # 正确显示负号class ConcaveLensSimulator:def __init__(self, root):self.root = rootself.root.title("凹透镜成像模拟器")# 物理常量self.focal_length = 8 # 凹透镜焦距为负,取绝对值,单位cm,滑块显示为正,内部转换为负self.object_height = 4 # 物体高度4cm# 设置UIself.setup_ui()self.root.update() # 强制布局更新,处理Matplotlib 区域显示不完整def setup_ui(self):"""设置用户界面"""self.main_frame = ttk.Frame(self.root)self.main_frame.pack(fill=tk.BOTH, expand=True)self.control_frame = ttk.LabelFrame(self.main_frame, text="参数控制")self.control_frame.pack(side=tk.LEFT, padx=10, pady=5, fill=tk.Y)self.viz_frame = ttk.Frame(self.main_frame)self.viz_frame.pack(side=tk.RIGHT, fill=tk.BOTH, expand=True)self.create_controls()self.init_plot()self.update_display()def create_controls(self):"""创建控制组件"""# 物距滑块ttk.Label(self.control_frame, text="物距 u (cm):").grid(row=0, column=0, sticky="w", pady=(10, 0))self.u_value = tk.DoubleVar(value=20)self.u_slider = ttk.Scale(self.control_frame, from_=5, to=30,variable=self.u_value,command=lambda _: self.update_display())self.u_slider.grid(row=1, column=0, sticky="ew")# 焦距滑块(显示正值,内部取负值)ttk.Label(self.control_frame, text="焦距 f (cm):").grid(row=2, column=0, sticky="w", pady=(10, 0))self.f_value = tk.DoubleVar(value=self.focal_length)self.f_slider = ttk.Scale(self.control_frame, from_=5, to=20,variable=self.f_value,command=lambda _: self.update_display())self.f_slider.grid(row=3, column=0, sticky="ew")# 物体高度滑块ttk.Label(self.control_frame, text="物体高度 (cm):").grid(row=4, column=0, sticky="w", pady=(10, 0))self.height_value = tk.DoubleVar(value=self.object_height)self.height_slider = ttk.Scale(self.control_frame, from_=1, to=10,variable=self.height_value,command=lambda _: self.update_display())self.height_slider.grid(row=5, column=0, sticky="ew")# 信息显示self.info_text = tk.StringVar()ttk.Label(self.control_frame, textvariable=self.info_text, wraplength=200).grid(row=6, column=0, sticky="w", pady=10)def init_plot(self):"""初始化绘图区域"""self.fig = plt.Figure(figsize=(8, 6))self.ax = self.fig.add_subplot(111)self.ax.set_xlim(-25, 25)self.ax.set_ylim(-8, 8)self.ax.axhline(0, color='black', lw=0.5) # 主光轴self.fig.subplots_adjust(left=0.1, right=0.95, top=0.95, bottom=0.1)self.canvas = FigureCanvasTkAgg(self.fig, master=self.viz_frame)self.canvas.get_tk_widget().pack(fill=tk.BOTH, expand=True)def calculate_image(self):"""计算像的位置和性质, 凹透镜焦距f为负"""f = -abs(self.f_value.get()) # 确保焦距为负值u = self.u_value.get()# 成像公式 1/v = 1/f - 1/uv = (u * f) / (u - f) # 放大率 m = -v/umagnification = -v / u # 由于v是负值,所以放大率为正(正立像),但小于1(缩小像)image_type = "虚像" # 凹透镜始终成虚像return v, magnification, image_typedef draw_optical_elements(self, u, v):self.ax.clear()self.ax.set_xlim(-25, 25)self.ax.set_ylim(-8, 8)self.ax.grid(True, linestyle='--', alpha=0.6)self.ax.axhline(0, color='black', lw=0.5) # 主光轴f = -abs(self.f_value.get()) # 确保焦距为负值# 保留焦点的红色圆点self.ax.plot([f, -abs(f)], [0, 0], 'ro', markersize=6)#self.ax.text(f, -0.5, "F'", ha='center', fontsize=10)self.ax.text(-abs(f), -0.5, "F", ha='center', fontsize=10)self.draw_lens()object_height = self.height_value.get()# 保留物体箭头self.ax.arrow(-u, 0, 0, object_height, head_width=0.5, head_length=0.3, fc='blue', ec='blue', lw=2)self.ax.text(-u, object_height + 0.5, 'Object', fontsize=10, ha='center')# 保留虚像箭头if v not in [np.inf, -np.inf] and v is not None:magnification = -v / uimage_height = object_height * magnification# 虚像用虚线箭头self.ax.arrow(v, 0, 0, image_height, head_width=0.5, head_length=0.2, fc='red', ec='red', lw=2, linestyle='--', alpha=0.7)self.ax.text(v, image_height + 0.5, 'Virtual\nImage', fontsize=10, ha='center', color='red')self.draw_rays(u, v, object_height)def draw_lens(self):"""绘制凹透镜 - 边缘厚中间薄"""# 凹透镜的形状 - 双曲线h = 6 # 透镜高度# 绘制两条垂直边线self.ax.plot([0, 0], [-h, h], 'black', lw=1)# 绘制透镜的边缘轮廓(双曲线形状)t = np.linspace(-h, h, 100)x_left = -0.2 - 0.02 * t**2 # 左侧曲线x_right = 0.2 + 0.02 * t**2 # 右侧曲线self.ax.plot(x_left, t, 'black', lw=2)self.ax.plot(x_right, t, 'black', lw=2)def draw_rays(self, u, v, object_height):"""绘制凹透镜成像光路 - 去掉箭头符号版本"""try:f = -abs(self.f_value.get()) # 凹透镜焦距为负值left_focus = f # 左焦点位置magnification = -v / uimage_height = object_height * magnification# 光路1:平行于x轴的光线# 从Object顶点平行射到透镜中心线上的点(0, object_height)self.ax.plot([-u, 0], [object_height, object_height], 'r-', lw=2)# 折射后,反向延长线过左焦点,实际光线发散slope1 = object_height / (-left_focus)x_end = 25y_end = object_height + slope1 * x_endself.ax.plot([0, x_end], [object_height, y_end], 'r-', lw=2)# 光路2:从Object顶点射向透镜光心self.ax.plot([-u, 0], [object_height, 0], 'g-', lw=2)# 穿过光心后方向不变slope2 = object_height / uy_end2 = -slope2 * 25self.ax.plot([0, 25], [0, y_end2], 'g-', lw=2)# 绘制反向延长线的交点(虚像)# 光路1的反向延长线self.ax.plot([0, v], [object_height, image_height], 'r--', lw=1.5, alpha=0.7)# 光路2的反向延长线self.ax.plot([0, v], [0, image_height], 'g--', lw=1.5, alpha=0.7)# 添加焦点和虚像点之间的红虚线self.ax.plot([left_focus, v], [0, image_height], 'r--', lw=1.5, alpha=0.7)except Exception as e:print(f"绘制光线错误: {str(e)}")def update_display(self, event=None):try:self.focal_length = self.f_value.get()self.object_height = self.height_value.get()u = self.u_value.get()v, magnification, image_type = self.calculate_image()info = f"物距 u = {u:.1f} cm\n"info += f"焦距 f = {-self.focal_length:.1f} cm\n" # 负值表示凹透镜焦距if v is not None:if abs(v) != np.inf:info += f"像距 v = {abs(v):.1f} cm\n"else:info += "像距 → ∞\n"if abs(magnification) != np.inf:info += f"放大率 m = {magnification:.2f}\n"else:info += "放大率 → ∞\n"info += f"像类型:{image_type}"self.info_text.set(info)self.draw_optical_elements(u, v)self.canvas.draw()except Exception as e:import tracebacktraceback.print_exc()self.info_text.set(f"更新错误: {str(e)}")returnif __name__ == "__main__":root = tk.Tk()app = ConcaveLensSimulator(root)root.geometry("1000x600")root.mainloop()
附录
关于 matplotlib更多情况 可见 https://blog.csdn.net/cnds123/article/details/148798860
关于numpy更多情况可见 https://blog.csdn.net/cnds123/article/details/135844660