方向导数与梯度下降
文章目录
- 方向角与方向余弦
- 方向角
- 方向余弦
- 方向导数
- 定义
- 性质
- 梯度下降
梯度下降法(Gradient descent)是一个一阶最优化算法,通常也称为最速下降法。 要使用梯度下降法找到一个函数的局部极小值,必须向函数上当前点对应梯度(或者是近似梯度)的反方向的规定步长距离点进行迭代搜索。如果相反地向梯度正方向迭代进行搜索,则会接近函数的局部极大值点;这个过程则被称为梯度上升法。
方向角与方向余弦
方向角
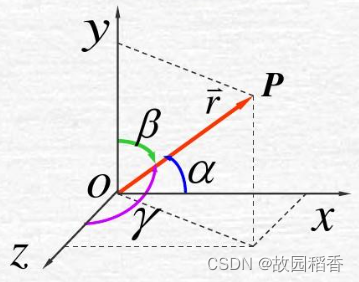
向量(或有向直线)与坐标轴正向或基向量的交角称为向量的方向角。定义域为[0,π][0,\pi][0,π]。
方向余弦
{cosα=x∣r∣cosβ=y∣r∣cosγ=z∣r∣\begin{cases} \cos\alpha = \frac{x}{|r|}\\ \cos\beta = \frac{y}{|r|}\\ \cos\gamma = \frac{z}{|r|} \end{cases}⎩⎨⎧cosα=∣r∣xcosβ=∣r∣ycosγ=∣r∣z
且有cos2α+cos2β+cos2γ=1\cos^2\alpha+\cos^2\beta+\cos^2\gamma=1cos2α+cos2β+cos2γ=1
方向导数
定义
给定标量函数f(x,y,z)f(x,y,z)f(x,y,z),和任意向量l⃗\vec{l}l,该向量与三个坐标轴的夹角分别为α\alphaα、β\betaβ、γ\gammaγ,从定义域中一定P0(x,y,z)P_0(x,y,z)P0(x,y,z)出发,沿着向量l⃗\vec{l}l方向移动距离Δs\Delta sΔs,到达点P1(x+Δscosα,y+Δscosβ,z+Δscosγ)P_1(x+\Delta s \cos\alpha,y+\Delta s \cos\beta,z+\Delta s \cos\gamma)P1(x+Δscosα,y+Δscosβ,z+Δscosγ),定义方向导数:
dfdl⃗=limΔs→0f(x+Δscosα,y+Δscosβ,z+Δscosγ)−f(x,y,z)Δs\frac{df}{d\vec{l}}=\lim_{\Delta s \to 0}\frac{f(x+\Delta s \cos\alpha,y+\Delta s \cos\beta,z+\Delta s \cos\gamma)-f(x,y,z)}{\Delta s}dldf=limΔs→0Δsf(x+Δscosα,y+Δscosβ,z+Δscosγ)−f(x,y,z)
代表函数fff在方向l⃗\vec{l}l的变化率。
性质
dfdl⃗=∂f∂xcosα+∂f∂ycosβ+∂f∂zcosγ=(∂f∂x,∂f∂y,∂f∂z)⋅(cosα,cosβ,cosγ)=∇f⋅n⃗=∣∇f∣cos⟨∇f,l⃗⟩\begin{aligned} \frac{df}{d\vec{l}} &=\frac{\partial f}{\partial x}\cos\alpha+\frac{\partial f}{\partial y}\cos\beta+\frac{\partial f}{\partial z}\cos\gamma \\ \\ &=(\frac{\partial f}{\partial x},\frac{\partial f}{\partial y},\frac{\partial f}{\partial z})\cdot(\cos\alpha,\cos\beta,\cos\gamma)=\nabla f \cdot\vec{n}=|\nabla f|\cos\lang\nabla f,\vec{l}\rang \end{aligned}dldf=∂x∂fcosα+∂y∂fcosβ+∂z∂fcosγ=(∂x∂f,∂y∂f,∂z∂f)⋅(cosα,cosβ,cosγ)=∇f⋅n=∣∇f∣cos⟨∇f,l⟩
当l⃗\vec{l}l取fff的梯度方向时,cos⟨∇f,l⃗⟩=1\cos\lang\nabla f,\vec{l}\rang=1cos⟨∇f,l⟩=1,变化率绝对值最大且为正;当l⃗\vec{l}l取fff的负梯度方向时,cos⟨∇f,l⃗⟩=−1\cos\lang\nabla f,\vec{l}\rang=-1cos⟨∇f,l⟩=−1,变化率绝对值最大且为负。
梯度下降
应用场景:求损失函数的最小值。
梯度下降的具体算法实现过程是:
1、确定模型和损失函数;
2、参数初始化,包括:参数、算法终止条件和步长;
3、参数更新θj+1=θj−α∂J∂θj\theta_{j+1}=\theta_j - \alpha \frac{\partial J}{\partial\theta_j}θj+1=θj−α∂θj∂J
4、判断停止条件,若满足,则停止,若不满足,则继续更新。