路径规划之启发式算法之二十:麻雀搜索算法(Sparrow Search Algorithm,SSA)
麻雀搜索算法(Sparrow Search Algorithm,SSA)是一种受麻雀觅食和反捕食行为启发的新型的群智能优化算法,它模拟了麻雀种群的觅食行为和反捕食行为的生物学群体特征。该算法由薛建凯在2020年首次提出,旨在解决全局优化问题,具有求解精度高、效率高等特点。
一、算法原理
SSA中的麻雀群体分为发现者(Discoverers)和乞讨者(Beggars)两类。发现者负责寻找新的食物源(即搜索空间中的新解),通常是群体中适应度最好的个体,它们引导群体向潜在的优质解决方案移动。乞讨者则跟随发现者,通过模仿其行为来寻找食物。
(1)发现者:占总种群的10-20%,负责搜索新的解空间,具有更高的搜索能力和更广泛的搜索范围。
(2)乞讨者:占总种群的80-90%,通过模仿发现者的行为来寻找食物,具有较低的搜索能力和更有限的搜索范围。
二、算法步骤
(1)初始化:设定麻雀种群规模、搜索空间范围、最大迭代次数等参数。随机生成初始麻雀种群,并计算每个个体的适应度值。
假设种群中共有只麻雀,每只麻雀在解空间中的位置表示为
,其中
是问题的维度,
和
分别代表搜索空间的下界和上界。

(2)种群划分:根据适应度值将麻雀种群划分为发现者和跟随者。发现者占种群的一定比例,剩余个体为跟随者。
(3)发现者更新:发现者根据当前位置、迭代次数和随机因子更新自身位置。更新公式考虑了麻雀的觅食行为和探索能力。
当安全值小于预警值
时,麻雀进行全局搜索觅食;当
时,麻雀以正态分布进行随机游走。

(4)跟随者更新:跟随者根据发现者的位置和自身状态更新位置。部分跟随者可能因饥饿而飞往其他区域觅食,增加种群多样性。
追随者位置更新考虑了与全局最优位置的距离以及随机因素。

(5)危险预警与位置调整:当麻雀种群感知到危险时,触发危险预警机制。麻雀个体根据预警信号调整位置,以躲避捕食者。
(6)适应度评估与身份转换:计算每个个体的新适应度值。根据适应度值的变化,允许发现者和跟随者之间转换身份。
(7)迭代与终止:重复上述步骤,直到达到最大迭代次数或满足其他停止条件。输出全局最优解或最优个体位置。
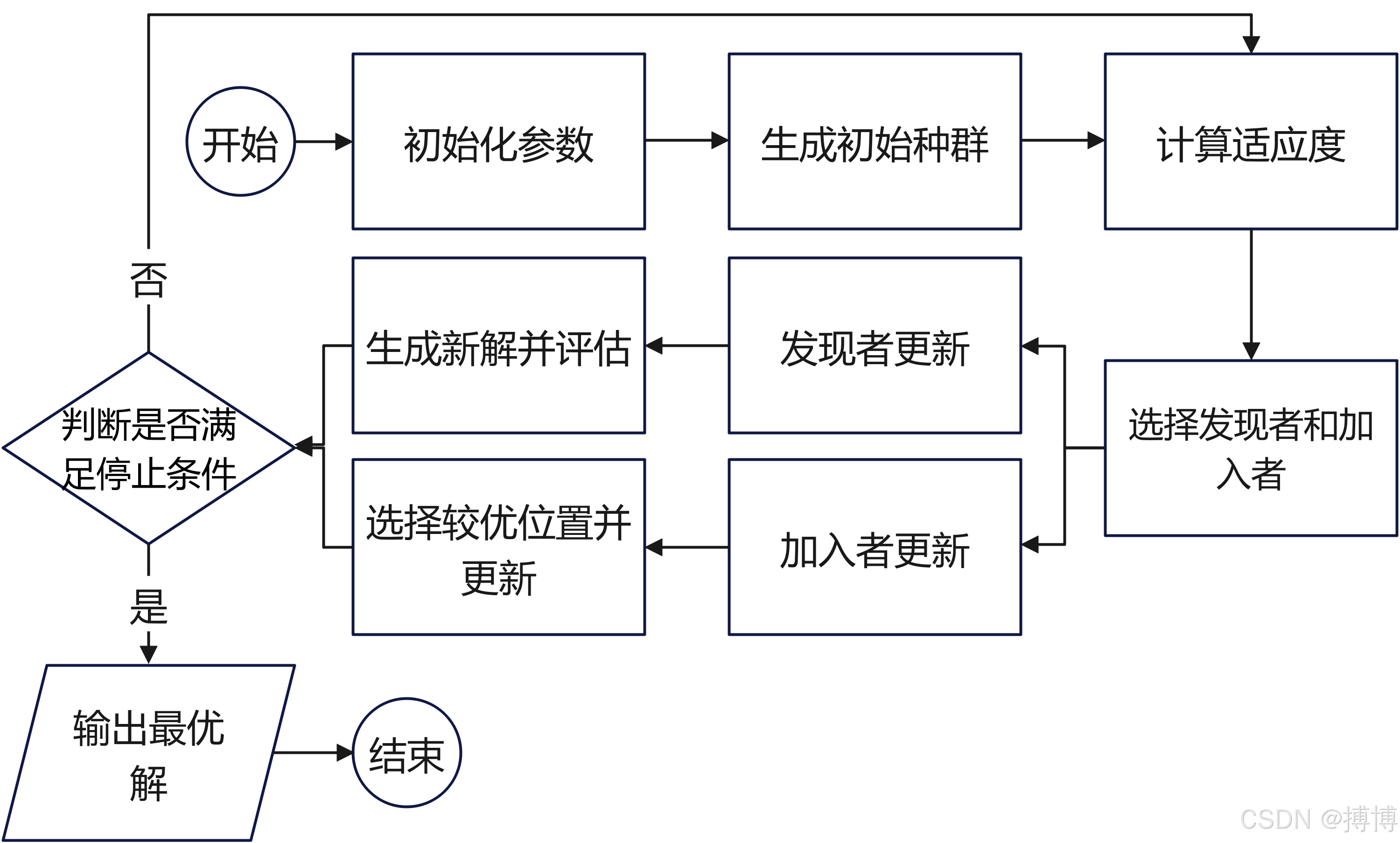
图1 麻雀搜索算法流程图
三、算法关键参数
(1)群体大小(N):群体大小影响算法的搜索能力和多样性。较大的群体可以提供更广泛的搜索范围,但计算成本更高。一般建议群体大小在50-100之间。
(2)迭代次数(Max_iter):迭代次数决定了算法搜索的深度。更多的迭代次数有助于找到更优解,但会增加计算时间。建议迭代次数在500-1000之间。
(3)邻域大小:邻域大小影响个体在解空间中的搜索范围。较大的邻域可以增加搜索的广度,但也可能降低搜索的精度。建议邻域大小在0.1-0.2之间。
(3)交叉率和变异率:这两个参数控制种群中个体的遗传多样性。交叉率和变异率通常设置在0.5左右,以保持搜索能力和多样性。
(4)惯性权重:惯性权重控制个体在搜索空间中的移动速度。较大的惯性权重可以加快搜索速度,但也可能导致算法过早收敛。建议惯性权重在0.5-0.9之间。
(5)随机因子:随机因子增加搜索过程中的随机性,有助于算法跳出局部最优。建议随机因子在0.1-0.2之间。
(6)警戒者比例(N_Vigilant):警戒者负责监测环境并预警潜在威胁,其比例影响算法对环境变化的响应能力。适当增加警戒者比例可以提高算法的适应性。
(7)发现者和追随者比例(N_discoverer和N_Followers):发现者负责探索新的食物源,追随者则利用这些信息。调整这些比例可以平衡探索和利用,影响算法的收敛速度和解的质量。
(8)安全阈值(ST):安全阈值影响警戒者的行为,进而影响整个种群的动态。适当调整安全阈值可以控制算法的搜索策略,平衡全局搜索和局部搜索。
通过调